基于BP神经网络的马铃薯遥感识别图像数据分析研究
2017-10-13周扬帆陈佑启邹金秋何英彬
周扬帆 陈佑启 邹金秋 何英彬
(中国农业科学院农业资源与农业区划研究所,北京 100081)
基于BP神经网络的马铃薯遥感识别图像数据分析研究
周扬帆 陈佑启 邹金秋 何英彬
(中国农业科学院农业资源与农业区划研究所,北京 100081)
运用遥感手段精确监测马铃薯种植面积是稳固马铃薯主粮化政策、维护国家粮食安全的必要保障。本文以吉林省长春市九台区纪家镇、兴隆镇为研究区,选用landsat8 OLI遥感数据,借助ENVI平台构建了基于BP神经网络的土地覆盖分类模型,应用于研究区的马铃薯等作物分类研究。以landsat8 OLI7个彩色波段作为输入,不断调节分类参数,最终确定了最优分类网络结构。结果显示,BP神经网络法马铃薯的分类生产者精度为94.22%。研究表明,BP神经网络分类方法是一种手段灵活、结果较准确的马铃薯遥感识别方法。
BP神经网络;马铃薯;遥感影像;遥感数据;遥感影像识别;最优参数;误差调节
目前,借助遥感影像进行农作物面积的提取主要应用于玉米、水稻等禾本科作物,对马铃薯等茄科作物研究较少。在众多的遥感分类方法中,传统的遥感农作物种植面积获取方法虽具有一定的意义,但经常受到人为或地表环境因素限制,即使改进方法,分类精度也难以达到研究要求。如k-means算法收敛速度快,但过分依赖初值,容易陷入局部极值;最大似然分类精度较高,但却要求输入数据满足正态分布。
近年来,人工神经网络智能分类方法成为热点。其中,BP神经网络法操作简单,具有较强的非线性逼近及自我学习能力,对样本适应性强,分类结果可靠,逐渐受到重视[1-5]。彭光雄等[6]选用BP神经网络法,基于多时相的遥感影像提取云南省弥勒县境内的竹园坝地区的甘蔗和玉米种植区,Kappa系数为0.635。方惠敏等[7]依据国家农业科学数据中心数据库为样本数据,运用BP神经网络提取试验区内玉米种植面积,并建立预测玉米区域测试产量模型。熊勤学等[8]选取MODIS 的NDVI时序曲线进行分析,采用BP神经网络法进行分类,有效提取出湖北省江陵区中稻、晚稻、棉花3种作物类型。目前,应用BP神经网络方法进行遥感识别已经发展至能结合反射率及植被指数等不同数据类型、地物光谱特征及纹理特征等不同输入特征的智能分类方法。此外,遥感数据源是应用遥感技术进行作物分类的基础,其质量和成本直接决定了研究的尺度和效率。目前的卫星影像数据从光谱分辨率、空间分辨率和时间分辨率进行识别基本覆盖了各种类型的数据,但受到传感器制造技术的限制,同一种数据的3种分辨率往往无法兼顾[9]。
考虑到作物识别需要利用卫星丰富的波段信息及较高的空间分辨率。综合比较后,本文选用近年来应用较为广泛的Landsat8 OLI遥感影像,在ENVI5.3等软件平台支持下,使用BP神经网络方法,通过调节训练参数,对吉林省长春市九台区纪家镇、兴隆镇耕地进行类别分类,提取马铃薯种植区域,以期对智能化遥感影像的马铃薯识别研究提供参考。
纪家镇、兴隆镇隶属吉林省长春市九台区,位于东经 125°34′50″—125°47′50″,北纬 44°5′12″—44°24′34″。土地总面积为 369.36 km2,其中耕地面积为293.19 km2(占土地总面积的79.3794%),盛产马铃薯、玉米和水稻,是国家重点商品粮基地、出口基地和长春地区重要的农副产品集散地之一。研究区内作物种植类型丰富,品种齐全,适合进行多种作物中识别马铃薯的遥感研究。
1 遥感数据源与辅助数据
Landsat8卫星于2013年2月11日发射,是美国陆地探测卫星系列的后续卫星。卫星装备有陆地成像仪(Operational Land Imager,简称“OLI”)和热红外传感器(Thermal Infrared Sensor,简称“TIRS”)。OLI被动感应地表反射的太阳辐射和散发的热辐射,有9个波段的感应器,覆盖了从红外到可见光的不同波长范围。为获取试验区分类训练、检验样方,于2016年6月进行野外调查,确定了不同分类地物所在位置,主要类型包括马铃薯、玉米、水稻和其他地表覆盖(居民区、水体、道路等)4类。在实地调查时,除了记录前期勾画的外业调查样本的类别属性外,同时用 GPS 记录野外调查路线中遇到的典型马铃薯区域地理坐标。依据样本点和野外打点数据,用目视解译在ArcGIS软件平台中生成研究区本底图(图1),以此作为验证BP神经网络分类结果的验证基础。
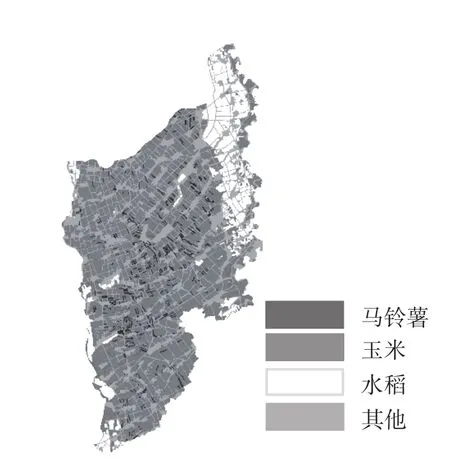
图1 研究区本底图
2 研究方法
在整个分类过程中,选择合理的BP神经网络结构及分类参数可以使网络具备良好的容错性,得出较好的分类结果。研究表明[12-13],在众多人工神经网络算法中,BP神经网络方法是最广泛的研究与应用的分类方法。
分类时选用数据为Landsat8 OLI遥感影像7个彩色波段(1~7波段),因此输入层节点数为7,按照4个地物类型设置输出层节点数为4。整个分类过程在ENVI平台进行,需要选择设定的参数如下。
(1)活化函数:输入层与隐层及隐层与输出层间的传递函数,包括对数函数和双曲线函数两类。
(2)初始权值:用于调节节点内部权重的变化。通过交互式调整输入层与隐层及隐层与输出层节点间的权重和阈值,从而使输出结果与理想输出值之间的误差值达到最小。
(3)学习速率:BP神经网络选用梯度下降法进行误差调节,调节过程中的步长因子即代表学习速率,参数值越大则使训练速度越快,但也会增加摆动或使训练结果不收敛。
(4)动量因子:引入动量因子是为了增加网络的稳定性防止振荡,促使权重沿当前方向改变。以此提高算法迅速收敛的能力,改善梯度下降法收敛速度慢、陷入局部极小值的缺陷。
为模拟CaO基CO2吸附剂实际分解反应过程,建立准确的预测模型,须获得升温过程中颗粒加热速率高达 1 × 102 ~ 1 × 105℃/s的反应速率,但过高的升温速率又导致CaCO3分解太快而无法精准地捕捉反应过程信息[17],故本文选择 1 × 102 ~ 1 × 103℃/s升温速率段进行分解反应动力学特性研究。图2a ~图 2d是最大升温速率为 300℃/s、500℃/s、600℃/s、800℃/s加热速率下CaCO3颗粒的温度曲线、加热速率曲线和CO2生成曲线。图3为CO2生成量M随时间t和温度T的变化情况。
(5)最小均方根误差(RMS):期望得到的最小误差值。网络训练时当误差值小于设定值时,即使还没有达到迭代次数,训练也会停止,然后开始进行分类。
(6)隐层数目:若不同的输入区域与一个单独的超平面线性分离时,隐层数目设为0,网络进行线性分类。若进行非线性分类,隐层数目应大于等于1。
(7)训练次数:指用于网络训练的迭代次数。
(8)最小输出活化阈值:如果被分类像元的活化值小于该阈值,在输出的分类中,该像元将被归入未分类中。
3 马铃薯的遥感影像识别
研究采用景号为LC81180292016138LGN00的TM数据,采集时间为2016年7月4日。利用 ENVI 5.3软件对TM影像进行辐射定标,得出大气上行辐射亮度值,并选取FLAASH[14]模型进行大气校正,将其转换为地面真实反射率数据。校正后将投影方式和坐标系统转化为Albers-WGS1984投影,便于与其他资料统一以进行分析。以纪家镇、兴隆镇行政范围矢量数据对影像进行裁剪,得到研究区影像如图2所示。
BP神经网络分类的训练样方从本底图中选出,4种类别每类20个,共计80个样方;分类前需要对训练样方的可分离性进行衡量[15],利用ENVI 5.3中Compute ROI Separability计算训练样方的分离度,表1结果显示各类别样方间的可分离性值均大于1.9,说明样方间的分离性较好,属于合格样方。

图2 Landsat8影像辐射定标、Flaash大气校正结果
在BP神经网络训练的过程中,8个训练参数共同作用影响分类结果,因此选择控制变量法逐一进行最优参数的选取,直至得出所有训练参数的最优值。最优参数依据检验样方对分类结果进行评估得出。检验样方由本底图中勾画,每种类别150个样方,共计600个样方,7937个像素点。主要精度评价指标包括:总体分类精度(Overall Accuracy)、Kappa系数(Kappa Coef fi cient)、生产者精度(Producer Accuracy)。
(1)活化函数
活化函数设定为对数函数和双曲线函数,得出检验分类精度信息如表2。当活化函数设置为初始值对数函数时,整体分类精度为91.8357%,其中,马铃薯的生产者精度为74.13%;当活化函数设定为双曲线时,整个研究区并未得出各类别的分类结果,所有作物类别均识别为水稻,无法进行作物区分。因此,确定活化函数为对数函数。
(2)初始权值
在用机器语言进行代码编程时,所选用的初始权值一般是电脑直接赋予的随机值。先前确定的活化函数为对数函数,通过观察对数函数曲线可知,在(0~1)的范围内,函数值变化明显,即不同自变量(输入值)所对应的因变量(输出值)差别较大。依据专家打分及已有研究结果[1],将初始权值设定为0.9进行逐步调节,检验分类精度信息如表3。在初始权值按照由大至小的方向调节时,总分类精度和马铃薯的生产者精度都逐渐提升,最终确定初始权值为0.1。
(3)学习速率
BP神经网络进行学习过程时,误差调节采用梯度下降法。梯度下降法的原理是沿梯度下降的方向求解极小值,即获得BP神经网络输出值与期望值的误差最小值。求解过程中,步长(BP神经网络中定义为学习速率)是最重要的参数,它决定了在梯度下降迭代的过程中,每一步沿梯度负方向前进的长度。学习速率过快,可能使权值每一次的调整过大,甚至会导致权值在修正过程中超出某个误差的极小值呈不规则跳跃而不收敛;过小的学习速率能够保证达到极小值,但学习时间过长[16]。
因此,为保证不因学习速率过快忽略极小值,结合专家意见,将学习速率初始值设定为0.2,进行逐步调节,最终检验分类精度信息如表4。学习速率由0.2调节至0.5时马铃薯生产者精度由78.53%大幅提升至83.63%,但再调节后精度没有任何变化,因此学习速率设定为0.5。

表1 训练样方可分离性统计表

表2 不同活化函数分类精度

表3 不同初始权值分类精度
(4)动量因子
增加动量因子的目的是避免BP神经网络训练陷于较浅的局部极小点。理论上其值大小应与学习速率的大小有关,但实际应用中一般取常量,通常在0~1,而且一般比学习速率的值大[17]。因此,在确定学习速率为0.5的前提下,将动量因子初始值设定为0.9,分类结果显示马铃薯的生产者精度为93.9524%,进一步调节动量因子,最终检验分类精度信息如表5。数据表明,当动量因子设定为0.9时,3种精度检验系数均为最大值,最终确定动量因子为0.9。
(5)最小均方根误差(RMS)
BP神经网络分类过程中,RMS值越小表示得出的分类结果越满足期望值,但过小的误差值会导致训练时间过长。因此,将初始值设定为0.1进行进一步的调节,检验分类精度信息如表6。在表6中数据显示RMS值升高至0.25时精度大幅提升,故最终确定RMS值为0.25。
(6)隐层数目
隐层数目选择十分复杂,往往与求解问题、输人/输出节点数目都有直接关系,需要根据设计者的经验和多次实验来确定,因而不存在一个理想的解析式来表示[18]。若数目太少,网络所能获取的用以解决问题的信息太少;若数目太多,不仅增加了训练时间,而且导致网络容错性差、不能识别未训练过的样本以及出现“过度吻合”现象。研究表明[19],在一般情况下,单隐层的BP神经网络就可以满足实际应用需要。
因此,将隐层数目初始值设置为1进行调节。为避免网络训练时间过长,只选择单隐层和双隐层进行测试,最终检验分类精度信息如表7。结果表明,隐层数目设定为单层时精度更高,因此隐层数目设置为1。
(7)训练次数
训练次数指进行BP神经网络权值调节的次数。训练次数过少导致分类结果无法满足预期精度,训练次数过多会增加训练时间。表8参数调节结果显示,训练次数调节至200次时已能达到较高精度,故将该参数值设定为200。
(8)最小输出活化阈值
ENVI分类参数中的最小输出活化阈值限定了待分类影像中的像元是否被输出为未分类(unclassi fi ed)类别。由于希望将所有的像元都归类为提前设定的训练样本所属类别,因此将该参数设为零,不作调整。

表4 不同学习速率分类精度

表5 不同动量因子分类精度

表6 不同最小均方根误差分类精度
4 分类结果及精度检验
依据试验最终确定的参数为:活化函数为对数函数,初始权值为0.1,学习速率为0.5,动量因子为0.9,RMS为0.25,隐层数目为1,训练次数为200,最小输出活化阈值为零。
精度检验由本底图中勾画的检验样方对分类结果评估得出,检验样方4种类别每种150个,共计600个,7937个像素点。
经过混淆矩阵精度检验,得出的分类总精度为97.2912%,Kappa系数为0.9603,其中马铃薯的生产者精度为94.22%,分类结果如图3。
在ENVI中分别实施最小距离分类、马氏距离分类和K-means分类,分类后图像见图3,采用同样的检验样方进行混淆矩阵计算,得出3种分类方法的精度差异(表9),以实现分类结果的精度对比。
从表9可以看出,BP神经网络分类精度最高,与马氏距离法、最小距离法、K-means法的总体分类精度相比分别提升了3.2758%、11.0747%、27.8597%,同时Kappa系数、马铃薯的生产者精度也有类似程度的提高。结果表明,BP神经网络方法可以区分较相似的东北地区各耕地覆盖作物间遥感影像的光谱特征,得出较好的分类结果,完成马铃薯遥感影像识别。
5 结论与讨论
本文选用吉林省长春市九台区纪家镇、兴隆镇的Landsat8 OLI遥感数据,构建了三层式BP神经网络耕地分类模型,应用于研究区马铃薯提取研究。
(1)BP神经网络分类方法简单实用,自我学习能力强,在一定程度上能够区分光谱特征相似的不同作物的特征,可以得出较合理的耕地类别识别精度,完成遥感影像马铃薯提取的研究要求。

表7 不同隐层数目分类精度

表8 不同训练次数分类精度
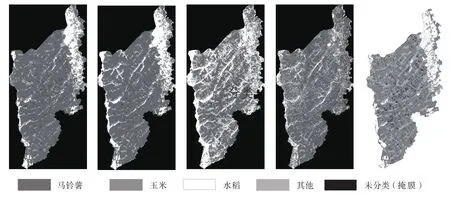
图3 各方法分类结果图

表9 不同分类方法的精度对比
(2)在BP神经网络进行遥感数据解译时,按照实验结果和已有知识对不同训练参数正确调节可以提升网络的分类精度与效率。
(3)最终得出的分类总精度达97.2912%,Kappa系数为0.9603,马铃薯的生产者精度超过94%,分类结果良好。
(4)遥感影像分辨率的高低对于解译精度影响较大,后续研究试图尝试将GF影像等高分辨率影像与OLI影像融合,以得到同时具备高光谱分辨率与高空间分辨率的分类基础影像,更好地提升分类精度。其次,BP神经网络作为机器学习算法,改变训练样方数量也可对分类精度产生影响,后续研究也可考虑增加训练样方数量来检验分类结果。此外,分类结果的混淆矩阵显示马铃薯与水稻的错分是马铃薯识别精度的主要干扰项。这主要是因为在分类时间点,马铃薯的光谱特征与水稻相似,因此后续研究中可以考虑将原始的光谱特征变形为植被指数等其他特征指数,将其作为BP神经网络输入特征值,扩大马铃薯与水稻的光谱特征差异,以此检验分类结果的精度变化。
[1]陈颖姝,张晓春,王修贵,等.基于Landsat8 OLI与MODIS数据的洪涝季节作物种植结构提取[J].农业工程学报, 2014, 30(21): 165-173.DOI: 10.3969/j.issn.1002- 6819.2014.21.020.
[2]TORRES-SANCHEZ J, LOPEZ-GRANDADOS F,PENA J M.An automatic object-based method for optimal thresholding in UAV images: application for vegetation detection in herbaceous crops [J].Computers and Electronics in Agriculture, 2015, 114: 43-52.DOI:10.1016/j.compag.2015.03.019.
[3]张焕雪, 李强子, 文宁, 等.农作物种植面积遥感估算的影响因素研究[J].国土资源遥感, 2015, 27(4): 54-61. DOI: 10.6046/gtzyyg.2015.04.09.
[4]SATIR O, BERBEROGLU S.Crop yield prediction under soil salinity using satellite derived vegetation indices[J].Field Crops Research, 2016, 192: 134-143.DOI: 10.1016/j.fcr.2016.04.028.
[5]JAYANTH J, KUMAR T A, KRISHNASHASTRY S,et al.Identi fi cation of land cover changes in the coastal area of Dakshina Kannada district, South India during the year 2004–2008[J].The Egyptian Journal of Remote Sensing and Space Science, 2016, 19(1): 73-93.DOI:10.1016/j.ejrs.2015.09.001.
[6]彭光雄, 宫阿都, 崔伟宏.等.多时相影像的典型区农作物识别分类方法对比研究[J].地球信息科学学报, 2009(2): 225-230.DOI: 10.3969/j.issn.1560-8999.2009.02.014.
[7]方惠敏, 张守涛, 丁文坷.基于BP神经网络的玉米区试产量预测研究[J].安徽农业科学, 2007, 35(34):10969-10970.DOI: 10.3969/j.issn.0517-6611.2007.34.016.
[8]熊勤学, 黄敬峰.利用NDVI指数时序特征监测秋收作物种植面积[J].农业工程学报, 2009, 25(1): 144-148.
[9]黄文江.作物病害遥感监测机理与应用[M].北京: 中国农业科学技术出版社, 2009: 53-60.
[10]徐磊, 林剑, 李艳华, 等.基于BP人工神经网络的遥感影像分类[J].地理空间信息, 2012(4): 83-85, 88,181.
[11]陈明.MATLAB神经网络远离与实例精解[M].北京:清华出版社, 2013: 156-157.
[12]曹兆伟, 林宁, 徐文斌, 等.基于BP神经网络的东屿岛遥感影像分类[J].海洋通报, 2016(5): 587-593.DOI: 10.11840/j.issn.1001-6392.2016.05.013.
[13]肖锦成, 欧维新, 符海月.基于BP神经网络与ETM+遥感数据的盐城滨海自然湿地覆被分类[J].生态学报, 2013, 33(23): 7496-7504.DOI: 10.5846/stxb2012 06300916.
[14]李述, 刘琪璟.高程和大气模式对FLAASH模型校正结果的影响[J].遥感技术与应用, 2015, 30(5): 939-945.DOI: 10.11873/j.issn.1004-0323.2015.5.0939.
[15]马凯, 梁敏.基于BP神经网络高光谱图像分类研究[J].测绘与空间地理信息, 2017(5): 118-121.DOI:10.3969/j.issn.1672-5867.2017.05.037.
[16]郭跃东, 宋旭东.梯度下降法的分析和改进[J].科技展望, 2016(15): 115, 117.DOI: 10.3969/j.issn.1672-8289.2016.15.103.
[17]李智, 赵子先, 郑君.动量梯度下降法训练BP网络[J].内蒙古科技与经济, 2006(12): 86-88.DOI: 10.3969/j.issn.1007-6921.2006.12.041.
[18]沈花玉, 王兆霞, 高成耀, 等.BP神经网络隐含层单元数的确定[J].天津理工大学学报, 2008(5): 13-15.DOI: 10.3969/j.issn.1673-095X.2008.05.004.
[19]范佳妮, 王振雷, 钱锋.BP人工神经网络隐层结构设计的研究进展[J].控制工程, 2005(Z1): 109-113.
Research on Image Recognition of Potato Remote Sensing Based on BP Neural Network for potatoes
ZHOU Yangfan, CHEN Youqi, ZOU Jinqiu, HE Yingbin
(Institute of Agriculture Resources and Regional Planning, Chinese Academy of Agricultural Science, Beijing 100081)
The e fficient and accurate remote sensing means of potato acreage monitoring is vital to stabilize potato production as a staple food and maintain the necessary guarantee for national food security. In this paper, a land cover classi fi cation model based on BP neural network was constructed to detect potato and other crops in the area of Jijia Town and Xinglong Town, locating in Jiutai District, Changchun City, Jilin Province.Taking the seven color bands of landsat8 OLI as input, the classi fi cation parameters are adjusted continuously,and the optimal classification network structure is finally determined. The results showed that the producer accuracy of potato was 94.22%. The research shows that BP neural network classi fi cation method is a kind of potato remote sensing identi fi cation method with fl exible measure and accurate classi fi cation result.
BP neural network, potato, remote sensing image, remote sensing data, remote sensing image identi fi cation, optimal parameter, error adjustment
P237
A
10.3772/j.issn.1674-1544.2017.05.014
周扬帆(1993—),女,中国农业科学院农业资源与农业区划研究所硕士研究生,研究方向:农业遥感与GIS应用;陈佑启(1962—),男,中国农业科学院农业资源与农业区划研究所研究员,博士生导师,研究方向:农业资源遥感与土地利用(通讯作者);邹金秋(1975—),男,中国农业科学院农业资源与农业区划研究所助理研究员,研究方向:农情遥感和GIS研究;何英彬(1977—),男,中国农业科学院农业资源与农业区划研究所副研究员,研究方向:土地利用与农业遥感。
科技基础性工作专项项目“科技基础性工作数据资料集成与规范化整编”(2013FY110900);国家国际科技合作专项项目“天空地一体化精准农业物联网平台联合研发”(2014DFE10220)。
2017年7月14日。
