潜艇建造中的全站仪高精度转站方法
2017-10-13闵少松王中王海霖彭飞
闵少松,王中,王海霖,彭飞
海军工程大学舰船工程系,湖北武汉430033
潜艇建造中的全站仪高精度转站方法
闵少松,王中,王海霖,彭飞
海军工程大学舰船工程系,湖北武汉430033
[目的]应用全站仪对潜艇总段耐压壳体进行测量时,由于壳体分层、结构物遮挡等原因,需在多个不同位置架设全站仪才能完成整个舱段的测量,而全站仪自身转站功能限制条件大,无法满足潜艇内部测量的复杂环境要求,也难以保证较好的总体测量精度,因此提出一种新的高精度转站方法。[方法]该方法是在不同站位下均测量设定的几个相同公共点,利用各站位下的公共点坐标设计算法,自动建立多级转站关系,[结果]有效提高了转站精度和测量效率。[结论]实验表明,所提方法在多级转站条件下仍能保证总体测量达到亚毫米精度,可以满足潜艇建造的高精度测量要求。
潜艇建造;全站仪;高精度转站;激光测量
Abstract:[Objectives]When we measure submarine pressure hulls using a total station,it is essential to set several stations in order to complete the measurement of the whole cabin due to the complicated measuring environment.However,there are many restrictions related to the total station itself when moving stations,and it is also difficult to ensure measuring accuracy and satisfy the requirements of submarine measurement in complicated environments.[Methods]As such,a new station moving method is presented which can automatically establish standing relationships by measuring common points at every measuring position.[Results]This method can significantly improve accuracy and efficiency.[Conclusions]The experiment shows that the results of the new station moving method can meet sub-pixel precision and satisfy submarine measurement requirements with high accuracy.
Key words:submarine construction;total station;station moving with high accuracy;laser measurement
0 引 言
随着船舶建造的模块化和精细化,越来越多的高精度测量设备及方法被应用于船舶建造[1]。如采用全站仪进行长度、宽度、高度、水平度、垂直度及划线测量;采用全站仪对船体分段进行精细测量以检验分段建造质量;基于全站仪对总段测量并配合专业软件进行虚拟搭载,以实现总段无余量上船台[2]。采用激光全站仪配合专用软件进行船体建造已成为现代造船企业提高建造效率、保证建造精度的重要手段。目前,国内造船企业多数已引进全站仪作为测量设备,但配套的辅助软件开发较为迟缓,对全站仪的应用局限于全站仪本身的功能。
对于潜艇耐压壳体的测量来说,传统的测量大多采用手工测量的方法,不仅测量效率低下,且测量精度易受施工环境、测量人员素质等因素的影响。全站仪的引进大大提高了测量精度[3],但由于现场环境限制、结构遮挡等原因,通常需要在不同位置架设全站仪进行测量,即转站测量。
本文拟提出一种基于全站仪的高精度转站方法,利用公共点建立转站关系,实现将不同站位数据统一到基准坐标系下,并通过实验对转站精度进行验证。
1 转站基本理论
全站仪在测量过程中每次架设的位置称为一个站位,在该站位下通过测量得到的角度、距离关系建立起该站位下的局部坐标系。如图1所示,M为任意一个测点,全站仪测量的原始数据为水平角γ、垂直角α和斜距d,通过这3个参数可以建立全站仪的局部坐标系,并计算得到测点在该局部坐标系的三维空间坐标。M点在xoy平面上的投影点为M1,高差b=d⋅sinα,平距c=d⋅cosα,则测点M在以o为原点的全站仪坐标系下的坐标可表示为[4]。同样,在该坐标系下每个点都可通过坐标系来表示。

图1 局部坐标系建立Fig.1 Setup of local coordinate system
1.1 单站坐标系建立
目前在船体测量过程中,每个站位在架设全站仪后先对公共点进行测量,然后再完成该站下测点的测量工作。各站位间通过公共点建立联系,从而建立起各个局部坐标系之间的关系,实现将各坐标系下的测量数据统一到同一个坐标系中的目标。转站测量存在两种情况:一是单级转站,即在选定基准站位后,该站位可以通过公共点建立起联系,直接将数据转换到基准站位下;二是多级转站,即有些站位与基准站位之间的公共点数量不足以建立坐标转换关系,甚至没有任何公共点,这时就需要先将该站位测点数据转到其他站位,再通过其他站位转到基准站,中间可能存在1~3个,甚至更多的桥梁站位。多级转站是多个单级转站的合成,也就是多次坐标系转换。
1.2 单级转站算法
不同站位的测点坐标分属不同坐标系,当两个坐标系中具有多个相同测点时,这两个坐标系就可以建立联系,将其中一个坐标系的测点坐标转换到另一个坐标系下。目前,较常用的坐标转换算法有Bursa-wolf模型算法、三点法、罗德里格矩阵算法等方法。这些方法源于大地测量,在处理小旋转角、大平移量的问题上效果较好。Bursa-wolf模型算法对旋转角采取了微小角近似,将非线性模型转化为线性模型,但无法解决大旋转角的问题;三点法在存有大量公共点时计算稳定性不高;罗德里格矩阵法计算过于复杂,不利于程序实现。所以在大型测量场构建转站测量时,这些方法往往难以取得很好的效果,而且这些方法在面对粗差时,没有很有效的解决方法。鉴于此,本文在完整坐标转换公式的基础上提出了一种适用于潜艇耐压壳体测量的抗粗差坐标转换算法。

式中,基站坐标系定义为B,将A站转换到B,其中R为旋转矩阵。

借助全站仪为工具对潜艇耐压壳体进行测量有如下特点:
1)测量时不涉及尺度缩放问题;
2)全站仪在每次测量时,都会进行水平调整,同时,全站仪内置的双轴补偿功能基本可以保证每次转站的测量坐标系的z轴垂直。
因此,上述坐标转换模型中的参数可以进行简化,尺度缩放参数t可忽略;由于转站时每个测量坐标系的z轴都垂直,旋转参数中绕x轴旋转的参数f和绕y轴旋转的参数ω可以认为是0。坐标转换模型中的7个参数可以简化为4个参数。

旋转矩阵R可以简化为
在已知公共点的情况下求解转换参数,为典型的求解非线性方程问题,非线性模型的求解方法有很多种,比较典型的是高斯—牛顿法,在V=BdX-L处将目标函数线性化,优化其残差,通过循环迭代得到最优解。
列出残差方程如下:

式中:L为残差方程的参数。
具体迭代计算方法如下:

式中,

当X(k+1)与X(k)之间的差值小于设定的阈值之后,可认为达到最优解,计算完成,得到转换参数。四参数求解方法减少了求解参数,只需2个公共点即可求出转换结果,参数的减少可以使迭代计算的次数减少,提高计算的速度和求解的稳定性。
在潜艇耐压壳体测量过程中,经常存在各种不可控的因素,如现场施工造成的振动、测量人员操作全站仪的偶然误差等,会造成某些公共点测量时的粗差,直接影响参数的求解精度。上文中的四参数坐标转换直接求解方法并未考虑粗差的存在,可能导致求解的结果非最优。因此,在此基础上本文进一步优化,提出了一种过滤方法,循环过滤求解转换参数,获取x,y,z和k的最优估计值。具体过滤方法如下:
1)在所有公共点中选取2个点作为一组数据,组成若干组数据;
2)每组数据用四参数转换算法求取对应的转换参数,构成参数矩阵C:
4)将每组转换参数减去均值构成残差矩阵V:

5)矩阵每列元素求取其方差Dx,Dy,Dz和Dk;
6)利用方差构成权矩阵Q:

8)找出矩阵F最大的元素,此行数据被认为偏差较大,剔除参数矩阵C对应行的元素,构成新的参数矩阵。
重复步骤2)~步骤8),直至保留最后4组数据。对最后4组数据求均值,得到转换参数的x,y,z和k的最优估计值。
1.3 多级转站关系建立方法
对于潜艇耐压壳体而言,通常在一个舱段内需要将全站仪放置在若干位置,才能完成所有点的测量工作[6],因此需要将这无序的若干站位通过公共点建立相互之间的转换关系,首先需要确定基准站位,然后寻求其他站位到基准站位的转换关系。传统的转站方法存在因转站次数多导致转站关系建立难、计算量大、效率低、转站精度无法保证等问题。针对这些问题,提出一种现场适应性强的转站路径选择的优化方案,使测量分析过程得到简化,效率极大提高,同时又能保证高精度要求[7]。站位关系建立流程如图2所示,通过转站后各站位可实现将数据统一到一个站位下,效果如图3所示。

图2 站位关系建立流程图Fig.2 Flow diagram of building position relationship

图3 站位关系示例软件截图Fig.3 Example of position relationship
2 转站高精度验证实验
转站算法在提出并投入使用前,进行了大量的实验,通过不断改进完善,目前已经能够满足精度要求,并且已应用于潜艇建造现场。然而,虽然通过大量测量实验进行了验证,但实验的对象大多存在一定的建造误差,没有对标准件进行过测量,缺乏对结果进行判断的对比依据,可靠性受到一定的质疑。为对转站高精度进行进一步验证,采用渤海造船厂精加工标准件进行实验,通过多级转站,对构件相同测点坐标以及圆拟合后的挠度结果进行比较,从而对转站精度进行验证。
2.1 实验设计
本次实验采用渤海造船厂精加工的壳圈标准件(图4),对构件上部内表面进行车削加工,完成后未进行任何移动,不存在因受力而产生变形的情况[8]。因此,车削后上侧截面接近标准圆,机加工车削精度0.05 mm。采用全站仪进行转站测量,对精加工后的上部内表面同一肋位进行测量,通过每一站结果的对比分析对转站高精度进行评定。全站仪型号为拓普康NET05AX,测距范围为0.3~500 m,测角精度为0.5″,反射片模式测距的固定误差为0.5 mm,随着测量距离的增大,误差相应增大,误差增加量为1 mm/km,免棱镜模式测距的固定误差为1 mm,随着测量距离的增大,误差相应增大,误差增加量为1 mm/km。测量的整体思路是在壳圈内部架设全站仪,采用旋转靶标作为公共点,在每一个站位都对同一肋位的32个测点进行测量,将多次转站后的测量结果进行对比分析。在测量过程中共经过5次转站,设置6个站位,公共点选择磁性旋转靶标以便根据全站仪的角度进行调整,保证公共点的测量精度,其分布如图5所示。在每一个站位上,除第1站与第6站测量6个公共点外,其余各站均测量12个公共点,保证每2站之间存在6个公共点用于转站[9]。对于测点的测量均采用人工瞄准的方式,首先测量公共点,然后测量肋位上标定的32个测点,测点上贴反射片并采用反射片模式进行测量,测量站位分布俯视图如5所示。图中,中心6个站位为全站仪站位设置示意图,四周为旋转靶标分布图[10]。

图4 模型示意图Fig.4 Schematic diagram of measuring model
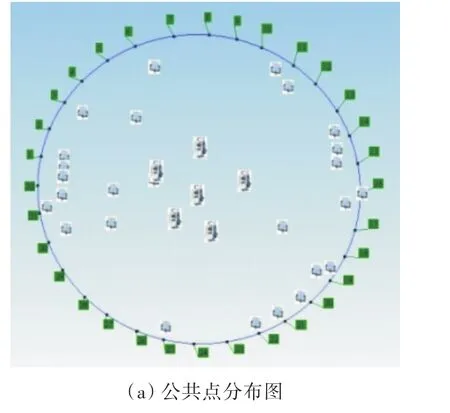
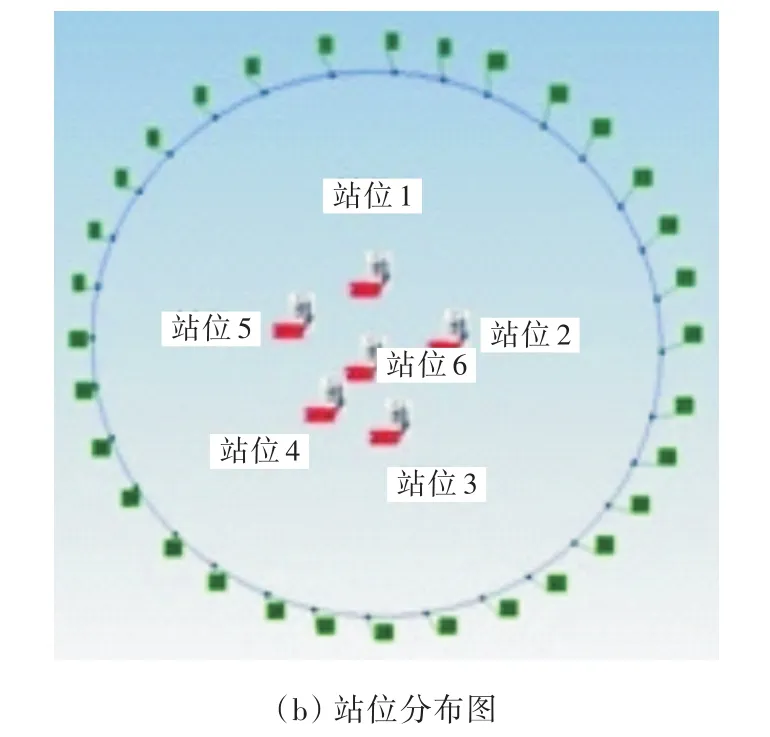
图5 站位及公共点分布图Fig.5 Distribution diagram of position relationship and common points
2.2 实验结果及分析
测量得到的公共点,利用1.2节中所提出的方法进行剔除,获取测量最为精确的公共点,通过相邻站位下公共点建立转站关系,从而建立所有站位之间的联系。
测量得到三维坐标数据后,首先对空间点进行平面拟合,并将所有测点投影到拟合平面上转化为二维问题,对测点进行最小二乘圆拟合,计算每个测点到圆心的距离与拟合半径之差,即测点初挠度值[11],并作为结果进行统计。由于测量得到的数据结果较多,因此只选取2个点的对比结果,如表1所示。

表1 不同站位测点数据Table 1 Measuring point data in different positions
通过表中结果可以看出,虽然测点结果每一站之间均存在偏差,但经过5次转站后,测点间的最大误差仍然小于0.5 mm,一致性非常好,体现出了转站算法的高精度。
根据在每个站位测量得到的数据进行最小二乘圆拟合,统计各点的初挠度计算结果,如表2所示。
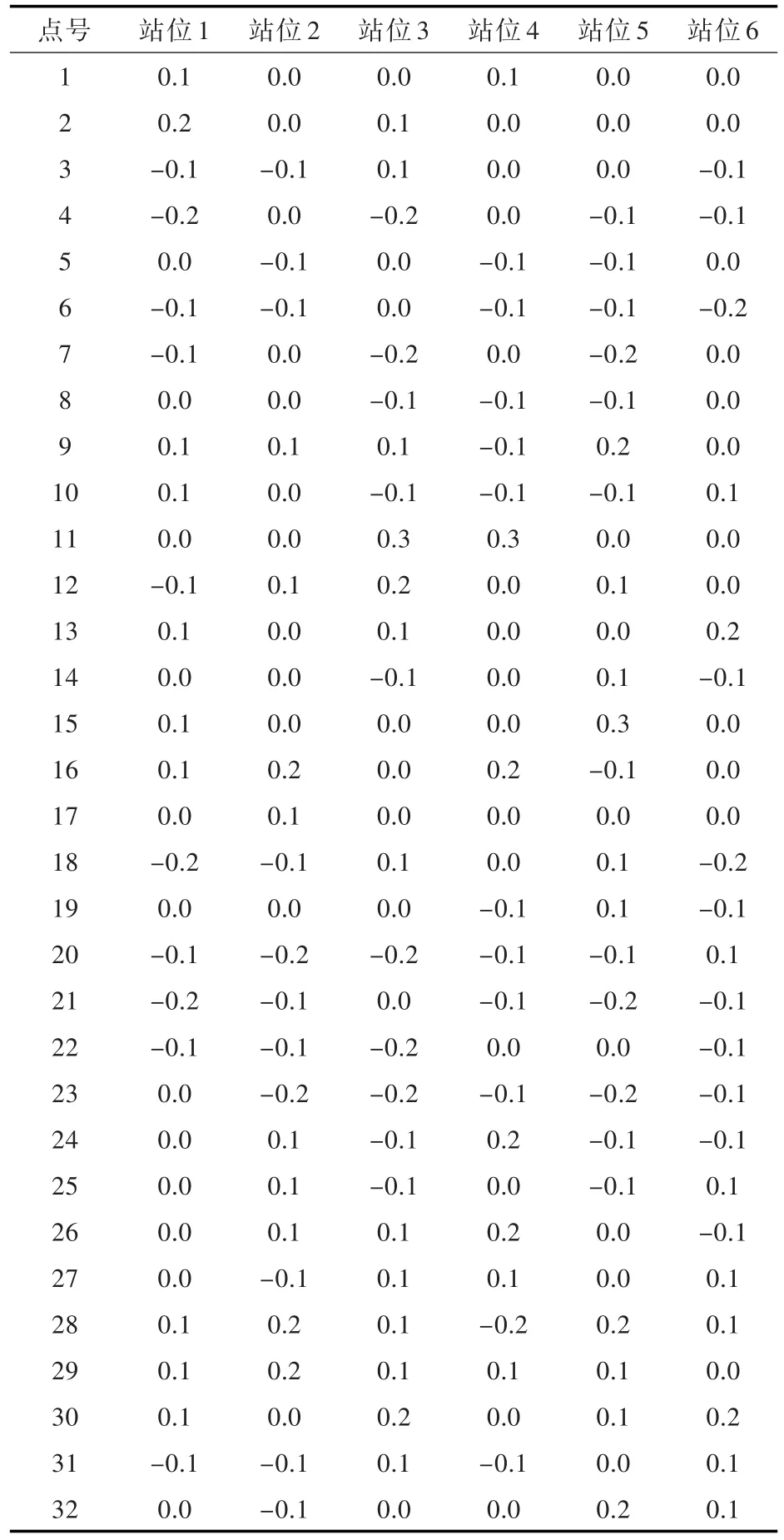
表2 各点初挠度计算结果Table 2 Results of initial deflection
将各站拟合结果进行汇总,统计每个站位下各点初挠度的最大值,结果如表3所示。
从表3中可以看出,经过5次转站之后,最大挠度结果随着转站次数的增加而有所累计,平均挠度值也有微小波动,但测量精度仍然控制在0.5 mm范围之内,表明在该算法下转站精度能够满足要求。产生偏差的原因主要是由于公共点的测量需要人为进行目镜瞄准,而每一次瞄准的结果即使足够精确,也不能完全相同,总会存在微小的偏差。虽然经过算法对公共点进行了选择剔除,但是不能彻底消除这种影响。因此,随着转站次数的增加,拟合结果会有微小的累计,但总体上并不影响测量精度,这也就要求对每一次公共点的测量要尽可能精确从而保证测量精度。

表3 各站位数据统计Table 3 Data statistics in different positions
3 结 语
本文提出了一种基于全站仪的高精度转站方法,利用旋转靶标或反射片作为公共点,通过不同站位下对公共点的测量建立站位关系,实现高精度转站。实验结果表明,该方法有效解决了不同站位下数据统一的问题,测量精度高,操作方便,在潜艇耐压壳体的测量中具有很大的应用价值。
[1]FRANCESCHINI F,GALETTO M,MAISANO D,et al.Large-scale dimensional metrology(LSDM):from tapes and theodolites to multi-sensor systems[J].International Journal of Precision Engineering and Manufacturing,2014,15(8):1739-1758.
[2]刘玉君,李艳君,李瑞.现代造船技术[M].大连:大连理工大学出版社,2012.
[3]刘文谷.全站仪测量技术[M].北京:北京理工大学出版社,2014.
[4]陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换的一种简便模型[J].武汉大学学报(信息科学版),2004,29(12):1101-1105.CHEN Y,SHEN Y Z,LIU D J.A simplified model of three dimensional-datum transformation adapted to big rotation angle[J].Geomatics and Information Science of Wuhan University,2004,29(12):1101-1105(in Chinese).
[5]曾文宪,陶本藻.三维坐标转换的非线性模型[J].武汉大学学报(信息科学版),2003,28(5):566-568.ZENG W X,TAO B Z.Non-linear adjustment model of three-dimensional coordinate transformation[J].Geomatics and Information Science of Wuhan University,2003,28(5):566-568(in Chinese).
[6]邱桂林.潜艇建造工艺学[M].北京:国防工业出版社,1982.
[7]郭一鸣,殷义勇,盛建国.船体建造精度控制测量方法研究[C]//2011中国造船工程学会造船工艺学术委员会造船企业精益生产学术研讨会论文集.福州:中国造船工程学会造船工艺学术委员会,2011:50-59.
[8]KUGEL H W,LOESSER D,ROQUEMORE A L,et al.Precision metrology of nstx surfaces using coherent laser radar ranging[J].Review of Scientific Instruments,2001,72(1):533-536.
[9]周跃寅,潘国荣.公共点分布对坐标转换精度的影响[J].大地测量与地球动力学,2013,33(2):105-109.ZHOU Y Y,PAN G R.Accuracy of coordinate transfer influenced by different distributions of common points[J].Journal of Geodesy and Geodynamics,2013,33(2):105-109(in Chinese).
[10]王中,彭飞,朱志洁,等.耐压体激光圆度测量分析系统[C]//2016年MIS/S&A学术交流会议论文集.大连:[出版者不详],2016:234-241.
[11]王鹏,朱晓军,赵剑飞.潜艇耐压壳体径向初挠度评定方法研究[J].武汉理工大学学报(交通科学与工程版),2013,37(1):149-152,157.WANG P,ZHU X J,ZHAO J F.Investigation of submarine pressure hull radial flexibility assess method[J].Journal of Wuhan University of Technology(Transportation Science&Engineering),2013,37(1):149-152,157(in Chinese).
High accuracy station moving method for total station in submarine construction
MIN Shaosong,WANG Zhong,WANG Hailin,PENG Fei
Department of Naval Architecture Engineering,Naval University of Engineering,Wuhan 430033,China
U674.7+06
A
10.3969/j.issn.1673-3185.2017.05.018
2017-02-13< class="emphasis_bold">网络出版时间:
时间:2017-9-26 10:19
国家自然科学基金资助项目(51609253),海军工程大学自然科学基金资助项目(HGDQNEQJJ15014)
闵少松,男,1978年生,博士,讲师。研究方向:舰艇修造工艺。E-mail:minshaosong@163.com
彭飞(通信作者),男,1975年生,博士,副教授。研究方向:舰艇修造工艺。E-mail:pengfei@188.com
http://kns.cnki.net/kcms/detail/42.1755.TJ.20170926.1019.002.html期刊网址:www.ship-research.com
闵少松,王中,王海霖,等.潜艇建造中的全站仪高精度转站方法[J].中国舰船研究,2017,12(5):141-146.
MIN S S,WANG Z,WANG H L,et al.High accuracy station moving method for total station in submarine construction[J].Chinese Journal of Ship Research,2017,12(5):141-146.