基于图像清晰度评价函数与自动取窗对焦的目标视觉调焦算法
2017-10-12田文利陕西财经职业技术学院咸阳712000
田文利(陕西财经职业技术学院, 咸阳 712000)
基于图像清晰度评价函数与自动取窗对焦的目标视觉调焦算法
田文利
(陕西财经职业技术学院, 咸阳 712000)
为了解决当前显微视觉系统在视场小、景深短和聚焦精度要求高的状况下存在离焦问题,难以满足精密制造业的高精度测量的要求,分别从清晰度评价、聚焦窗口动态选择和对焦搜索的角度出发,提出了基于清晰度评价函数与自动取窗对焦的工业显微视觉调焦系统。根据灰度梯度函数和频域分析函数,设计了耦合空间域与频域的清晰度评价算法,全面评价图像清晰度。对图像进行分块处理,根据子块灰度梯度变化程度,分离感兴趣区域与背景,实现动态智能选择聚焦窗口的目的。根据像方焦平面的单峰性特征,动态调整多步长与单步长,改进了爬山搜索算法,准确定位焦平面,提高聚焦准确度。实验测试结果显示:与当前显微视觉调焦技术相比,本文算法具有更高的准确性与实时性。
显微视觉; 清晰度评价; 聚焦窗口; 爬山搜索; 灰度梯度函数; 对焦搜索
Abstract: In order to solve the current micro vision systems such as small visual field, short depth and insufficiency from coke in high accuracy requirement, from the definition evaluation algorithm, dynamic focusing window selection and focus search algorithm, this paper presents evaluation function and the automatic fetching window for industrial microscopic visual focusing system. First of all, according to the gray gradient function and frequency domain analysis function, it designs the coupling of clarity evaluation algorithm of time domain and frequency domain. And then, it blocks the image, based on the sub-block gray gradient change degree, to distinguish the interested region and background, and achieves the goal of dynamic intelligent choice focused window. Finally, according to the unimodal feature of the focal plane, like the organic adjustment of step length and step length, it puts forward an improved climbing search algorithm. Test results show that compared with the current microscopic visual focus systems, this system has higher accuracy and better real-time performance.
Keywords: Micro vision; Sharpness evaluation; Focusing window; Hill-climbing search; Gray level gradient function; Focus search
0 引言
精密制造行业对于零部件的测量要求往往很高,需要用到显微视觉系统,对极小的物体进行成像测量,达到精密测量的目的[1-2]。但是显微视觉系统由于本身的局限,成像视野小、景深小,从而对系统的快速准确聚焦能力很高,从而限制了精密制造业的进一步发展。
在显微视觉方面,国内研究人员已经取得了一定研究成果,如郭建[3]提出了基于PSD的显微镜硬件自动聚焦系统,结合光学原理,进行了位置检测,根据聚焦提出的精度,然后由MCU对实验数据进行了线性化处理,从而得到了位移变化量和数据之间较好的对应关系,最终获得了精准的焦点位置。但是,此技术未充分考虑聚焦窗口对聚焦精度的影响,也未对清晰度函数做整合处理,不能全面的评价图像清晰度,往往影响了聚焦准确性。朱倩[4]提出了梯度与相关性结合的自动聚焦系统,清晰度评价函数是自动聚焦技术的核心部分,性能良好的聚焦曲线应该具有单峰性、无偏性、高灵敏度和抗噪性,通过将梯度差分与统计相关结合使用,提出了一种用邻域互相关对每个像素的梯度值进行加权的算法,并设定阈值去除贡献小的像素点。然而,这种技术仅考虑聚焦点有效性的优化,未考虑焦平面搜索算法的准确度,往往不能达聚焦准确目的。
为此,为了提高显微视觉系统聚焦功能的稳定性,以及精度与速度,本文提出了基于清晰度评价与自动取窗对焦的显微视觉调焦算法,并编程实现与验证本文调焦系统功能。
1 本文显微视觉调焦算法
待聚焦原图,如图1所示。
为清晰度测试卡的对焦内容,可见成像基本清晰,但是仍可进一步提高,本研究后续以该测试卡展开实验分析。显微视觉系统架构,如图2所示。
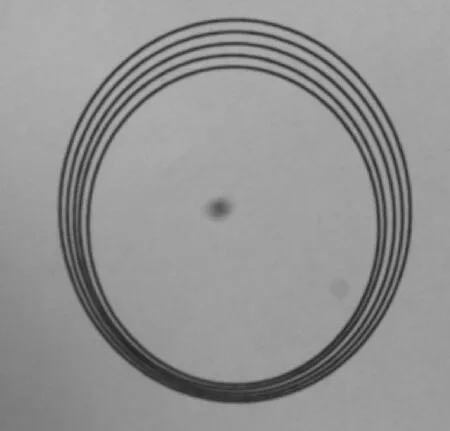
图1 待聚焦原图

图2 视觉打光结构
测试卡在显微采集视野的正下方,即视觉硬件打光方式。软件系统整体架构,如图3所示。
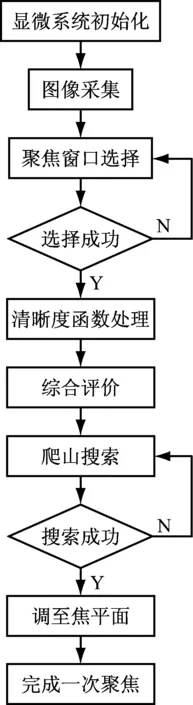
图3 系统软件架构
首先进行显微系统初始化,对测试卡进行镜下图像采集,根据本研究的聚焦窗口自主选择技术,确定聚焦窗口位置,计算其所在区域的清晰度函数值,并综合评价,然后开始调整镜头高低,搜索焦平面位置,最后达到准确对焦,得到清晰图像的目的。
1.1 清晰度评价函数
准确聚焦的前提是准确应用图像清晰度评价函数判断当前图像清晰与否,即判断图像细节是否丰富[5-7]。在空间域表现为相邻像素特征值变化大小,在频域表现为频谱高频分量的多少[8-10]。清晰度评价函数分为空间域与频域两类,空间域主要是灰度梯度函数利用图像各像素点间的灰度变化来表示图像清晰度,比如:梯度向量模函数、梯度滤波器函数、灰度涨落变化函数、拉普拉斯函数[11-13]。频域主要是基于傅里叶变换的高频幅值和函数。梯度向量模函数式如式(1)。
(1)
其中,F1代表梯度向量模方函数值],f(x,y)为图像中坐标(x,y)上的灰度值,M、N为图像宽和高。梯度滤波器函数如式(2)。
(2)
其中,F2代表梯度滤波器函数值,k为梯度步长常数(本研究设置为6)。灰度涨落变化函数如式(3)。
(3)
其中,F3代表灰度涨落变化函数值,u代表图像灰度均值,如式(4)。
(4)
拉普拉斯函数式(5)。[14-15]
(5)
其中,F4代表拉普拉斯函数值。聚焦良好的图像具有清晰边缘与丰富细节,这些与频域傅里叶变换后所含高频含量对应,高频幅值和函数如式(6)。
(6)
其中,F5代表高频幅值和函数值,代表高频分量和,W1、W2如式(7)。
(7)
本研究的改进点在于综合多种清晰度函数(梯度向量模函数、梯度滤波器函数、灰度涨落变化函数、拉普拉斯函数和高频幅值和函数)的计算结果,最后建立每个函数值必须达到清晰标准值的判断机制,完成图像清晰度评价,为聚焦窗口选择和爬山搜索做好准备。
1.2 聚焦窗口与爬山对焦
普通聚焦系统往往对全局视野内图像数据进行清晰度评价,这样不仅增加了不必要的计算量,同时也影响了清晰度评价的准确度[6-8]。因为图像中的背景往往为无关信息或者不感兴趣区域,为了解决上述问题,本研究提出自主聚焦窗口选择技术,如图4所示。
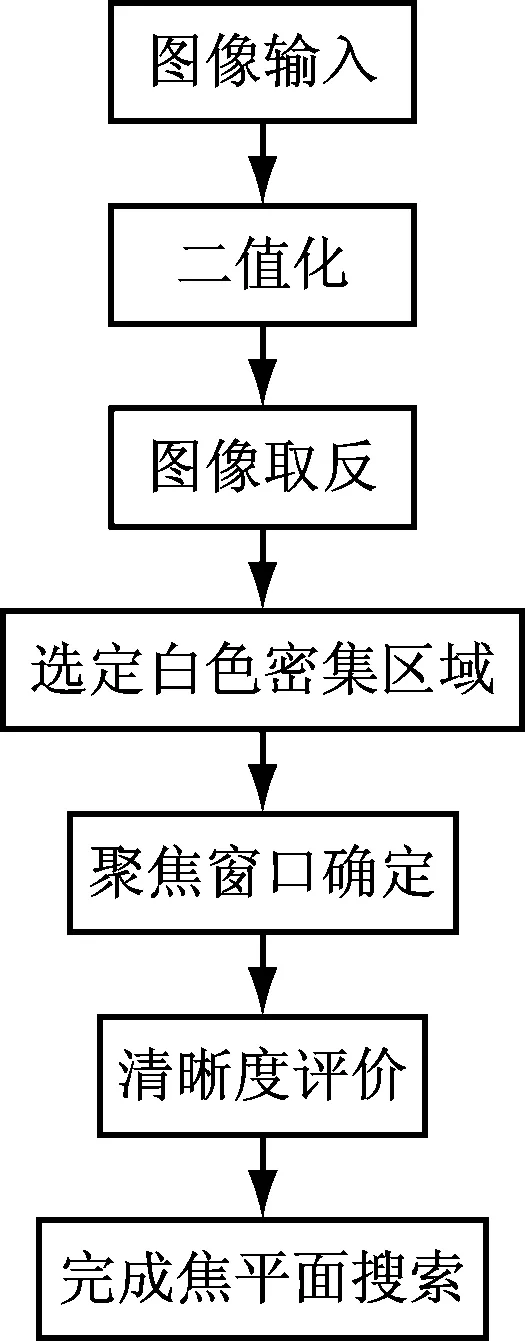
图4 聚焦过程
由于感兴趣目标往往成深色,而背景为浅色,故采用二值分割方法,得到二值图像,然后再图像取反,得到包含感兴趣区域在内的二值图像,如图5所示。
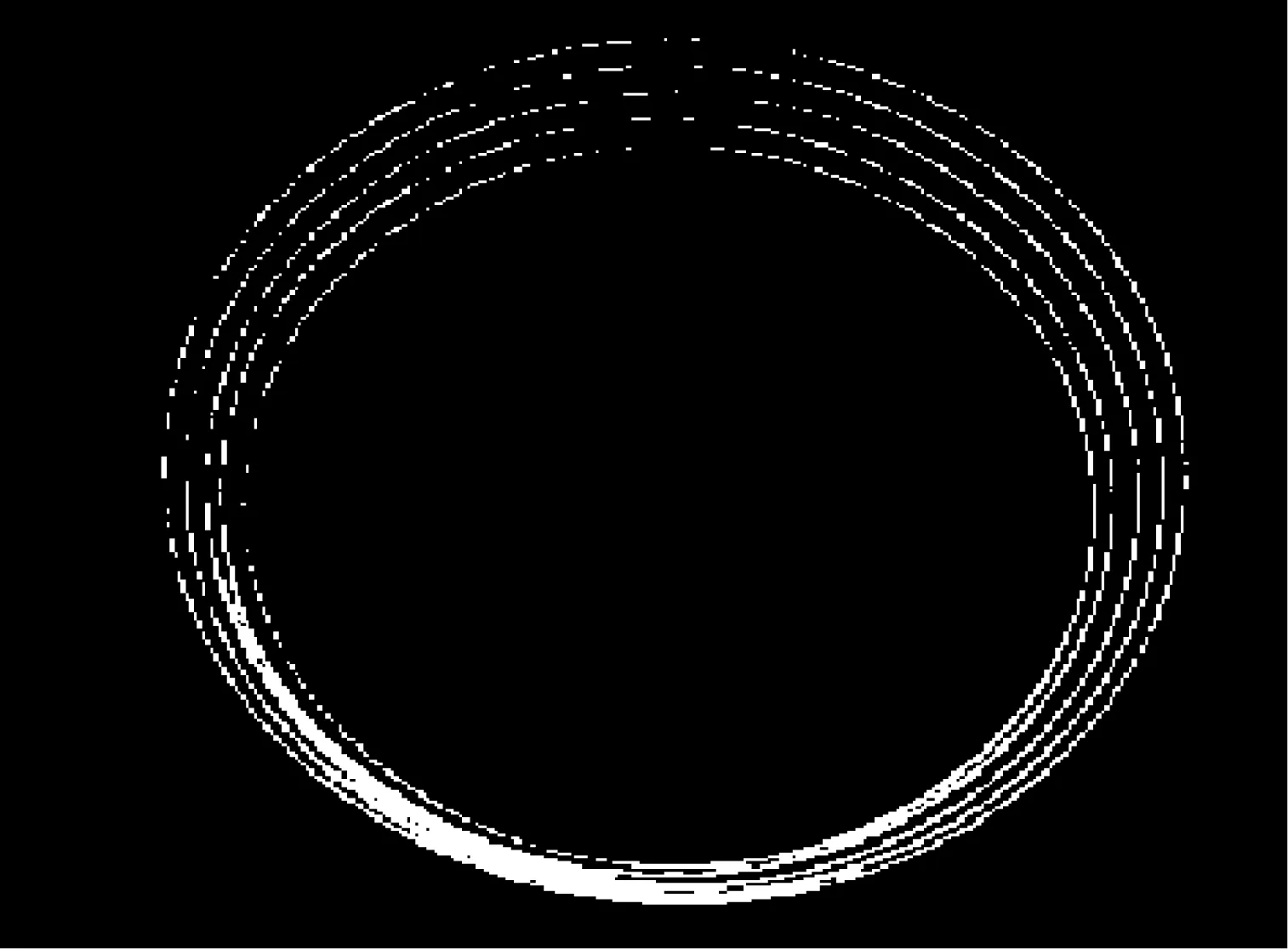
图5 二值化结果图
然后由轮廓查找,得到白色聚集区域坐标并用绿色标注,如图6所示。

图6 窗口自动选择结果图
得到聚焦窗口,基于上节综合清晰度评价函数计算,开始寻找焦平面,即聚焦开始。为了达到准确实时的搜索到焦平面,达到聚焦目的,本文设计了基于步长调整的爬山搜索算法:
(1)聚焦窗口内,清晰度函数计算。
(2)以4个步长,调整镜头高度,返回(1),直到清晰度函数值变化明显,进入(3)。
(3)以2个步长,调整镜头高度,直到清晰度函数值开始减小,进入(4)。
(4)以1个步长,反向调整镜头高度,直到清晰度函数值开始减小,进入(5)。
(5)以0.5个步长,反向调整镜头高度,直到清晰度函数值达到最大,结束聚焦。
基于以上智能调整步长的爬山算法,得到如图7所示。
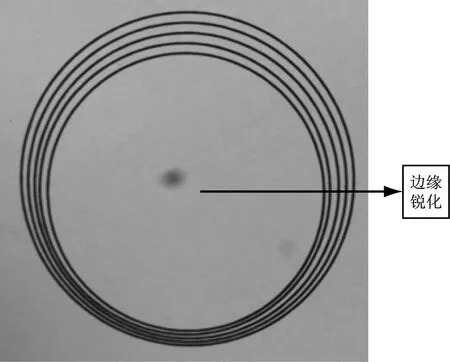
图7 聚焦结果
可见相比于原始图1 ,聚焦效果明显,图像细节丰富化、边缘锐利化。
2 实验与讨论
为了体现本文算法的优势,将定位聚焦性能较好的技术-文献[3]、文献[4]设为对照组,并基于VS2012平台开发实现,算法实验参数如:综合清晰度标准向量为[123,837,333,431,335,623]、分割阈值(50)。
以图8位目标,该图像中边缘信息锐利程度和细节丰富度不佳,利用本文算法、文献[3]、文献[4]三种系统对其进行聚焦,结果见图9~图13。
由于本文显微聚焦视觉系统采用结合二值分割与图像灰度取反处理,得到包含感兴趣区域的二值图像,如图9所示,轮廓查找标准感兴趣区域,如图10所示,再经过本文清晰度评价函数计算、步长调整爬山搜索算法的聚焦处理,如图11所示,准确完成聚焦,可见在图像细节丰富度和边缘锐利有明显提高。
而利用文献[3]技术是基于光学原理进行了位置检测,根据聚焦提出的精度,然后由MCU对实验数据进行了线性化处理,从而得到了位移变化量和数据之间较好的对应关系,最终获得了精准的焦点位置。但是,此技术未充分考虑聚焦窗口对聚焦精度的影响,也未对清晰度函数做整合处理,不能全面的评价图像清晰度,往往影响了聚焦准确性,如图12所示,其清晰度不佳。
文献[4]技术是通过将梯度差分与统计相关结合使用,提出了一种用邻域互相关对每个像素的梯度值进行加权的算法,并设定阈值去除贡献小的像素点。然而,这种技术仅考虑聚焦点有效性的优化,未考虑焦平面搜索算法的准确度,往往不能达聚焦准确目的,如图13所示,其边缘锐利度、细节丰富程度不佳。
图8 待聚焦原图

图9 二值化结果图

图10 窗口自动选择结果图
图11 本文算法的聚焦结果图

图12 文献[3]的聚焦结果
图13 文献[4]的聚焦结果
由于本研究聚焦结合自主聚焦窗口选择和步长调整爬山搜索技术,而对照组采用全局窗口处理和固定步长搜索,使得本文聚焦系统的效率最高,其耗时约为156 ms,而文献[3]、文献[4]两种技术的效率较低,其耗时分别为185 ms、193 ms,如图14所示。
图14 三种聚焦系统的效率测试结果
3 结论
为了解决当前工业显微调焦系统精度不稳定的问题,本文分别从系统硬件和软件出发,提出了基于综合清晰度评价函数和自动取窗聚焦的工业显微视觉调焦系统。首先,综合分析多种清晰度函数,覆盖空域灰度差异和频域高频分量,达到准确评价图像清晰度目的。然后设计综合二值化分割与图像取反的图像处理,达到自主选择聚焦窗口的目的。最后,设计有机调整步长的爬山搜索机制,达到精确定位焦平面的目的,实验结果表明:相较普通技术,本文工业显微调焦方法具有更高精度和稳定性,在精密制造业具有一定的应用价值。
[1] J. Apolinar, Muoz Rodríguez. Three-dimensional Microscope Vision System Based on Micro Laser Line Scanning and Adaptive Genetic Algorithms[J]. Optics Communications, 2016, 385(15): 1-8.
[2] 黄特生, 高健, 周志强. 面向电子制造的高速精密宏微运动平台研究[J]. 组合机床与自动化加工技术, 2015, 2(2): 50-54.
[3] 郭建. 基于PSD的显微镜硬件自动聚焦系统研究[J]. 机电工程,2016, 13(21):71-76.
[4] 朱倩.梯度与相关性结合的自动聚焦算法[J]. 光学技术, 2016,18(15):42-47.
[5] 李惠光. 显微视觉系统中自动聚焦算法的研究[J]. 计算机工程与应用,2016,21(21):283-287.
[6] Gui Tang Wang, Jian Lin Zhu. Research on Vickers Hardness Image Definition Evaluation Function[J]. Advanced Materials Research, 20111, 38(9): 134-138.
[7] Fei Li, Lin Li, Bao Yu Hong. Research on Definition Evaluation Algorithm of the Test Equipments for Phoropters[J]. Key Engineering Materials, 2013, 29(11): 428-433.
[8] 李惠光. 显微视觉系统大范围自动聚焦及控制[J]. 光电工程,2016, 16(4):181-185.
[9] Zuojiang Xiao, Di Han, Haibin Zhu. Research on automatic focusing technique based on image autocollimation[J]. Optik-International Journal for Light and Electron Optics, 2016, 33(17): 1201-1207.
[10] 杨明伟, 黄永东, 常霞. 基于SML特征检测的RPCA域多聚焦图像融合[J]. 计算机工程与应用, 2016, 33(11): 809-915.
[11] 郑媛媛. 自动聚焦算法研究[D]. 山东:山东大学, 2012: 22-25.
[12] 谷元保, 肖加俊. 一种基于图像处理的二次聚焦算法[J]. 长春理工大学学报(自然科学版), 2015, 3(1): 96-100.
[13] 潘雪娟. 基于梯度计算的自动聚焦图像清晰度评价函数仿真分析[J]. 红外技术,2016, 16(4):181-185.
[14] Elhassan ElJaoui, Said Melliani, L Saadia Chadli. Solving Second-order Fuzzy Differential Equations by the Fuzzy Laplace Transform Method [J]. Advances in Difference Equations, 2015, 2015(1): 1-14.
[15] 韩潇,彭力.基于改进拉普拉斯金字塔的图像融合方法 [J]. 自动化与仪器仪表, 2014, 10(5):191-194.
ObjectMicroscopicVisionFocusSystemBasedonClarityEvaluationFunctionandAutomaticFocusingWindow
Tian Wenli
(Shanxi Vocational College of Finance and Economics, Xianyang, Shanxi, 712000)
TP391
A
2017.04.28)
田文利(1980-),女,宝鸡人,硕士,讲师,研究方向:图像处理、计算机应用.
1007-757X(2017)09-0075-05