放疗模拟机辐射头控制系统设计
2017-10-12作者于宁波
【作者】于宁波
湖北三峡职业技术学院,宜昌市,443000
放疗模拟机辐射头控制系统设计
【作者】于宁波
湖北三峡职业技术学院,宜昌市,443000
该文设计了一种医用放疗模拟机辐射头控制系统,采用一拖二步进驱动电路,以闭环控制方式实现辐射头钨门和井线实时双拉同步控制。有效提升了模拟机辐射头控制精度,降低了设备制造成本。经临床应用,具有减少患者辐射剂量,提高治疗规划质量等优点。
放疗模拟机;放疗设备;自动化控制;步进电机控制
0 引言
放疗模拟机是在肿瘤放射治疗中制定放疗计划的关键设备之一[1],目前主要有常规模拟机和CT模拟机两种类型。由于常规模拟机具备透视功能,能实时显示患者脏器活动情况[2],且价格低廉,治疗费用低,所以,绝大多数医疗机构选择常规模拟定位机作为放疗前的模拟定位规划设备。常规模拟定位机能模拟放射治疗设备的全部运动,它与放射治疗设备有着大致相同的结构。可通过X射线影像系统,确定肿瘤的大小形状,具体位置,并转化成治疗床的高度、射野面积、肿瘤的深度,以及机架的旋转角度等,并与放射治疗设备一致。主要用来确定肿瘤区域和其他器官的位置,确定摆位参考标记,拍摄验证定位片等[3]。
常规放疗模拟机运动机构多,控制参数精度要求高,比放射治疗机更复杂,控制要求更高。其主要由支臂、辐射头(限束器、光栏钨门、界定器井线、位移指示、辐射野指示)、三维床、影像增强器(IP平板探测器)等部分组成。其中辐射头部分承载着放射治疗规划的核心功能,是放疗模拟机的重要组成部分,其机械结构复杂、运动部件多、单位空间元件数量密度大,是影响放疗规划质量与效率的关键部件。
本文在对常规模拟机辐射头结构做了优化改进的基础上,研究设计了一种新型放疗模拟机辐射头控制系统。主要在辐射头钨门和井线控制部分,采用了具有良好控制特性和低速转矩的步进电机控制单元,跟随式全闭环井线运动控制方式。同时,使用PLC的PTO功能,优化了模拟机辐射头钨门和井线控制结构,重新完成了辐射头控制部分的系统配置和电气程序设计。
1 辐射头运动机构技术要求
1.1 模拟机辐射头运动机构组成
模拟机辐射头运动部分主要包括辐射头旋转、限束器钨门开合运动,界定器井线开合运动。
1.2 限束器钨门组成及技术要求
限束器钨门由4块可以前后移动的钨门组成,它的作用是将病灶暴露在辐射野中,阻挡住病灶以外的器官组织,防止患者受到不必要的电离辐射,优化后的结构如图1所示。每块钨门既可以独立运动,也可以双门对向同步运动,任意组合成对称或不对称辐射野。每块钨门要求离开中心点最大开合距离大于100 mm,4块钨门全部打开后可组成200 mm×200 mm辐射野,运动时最大速度不高于10 mm/s,位移控制精度为1 mm。
1.3 界定器井线组成及技术要求
界定器井线由四根钼丝组成,相互垂直组成“#”字结构,通过钼丝遮挡X射线作用,在辐射野的调节基础上,将病灶边缘勾画出来,标记出治疗射野,优化后的结构如图2所示。四根钼丝可以独立运动,也可以对向组合,实现双拉同步运动,单根井线最大开合距离大于100 mm,可最大组成200 mm×200mm射野,运动时最大移动速度不高于10 mm/s,位移精度为1 mm,通过结合位移检测装置实现闭环控制。
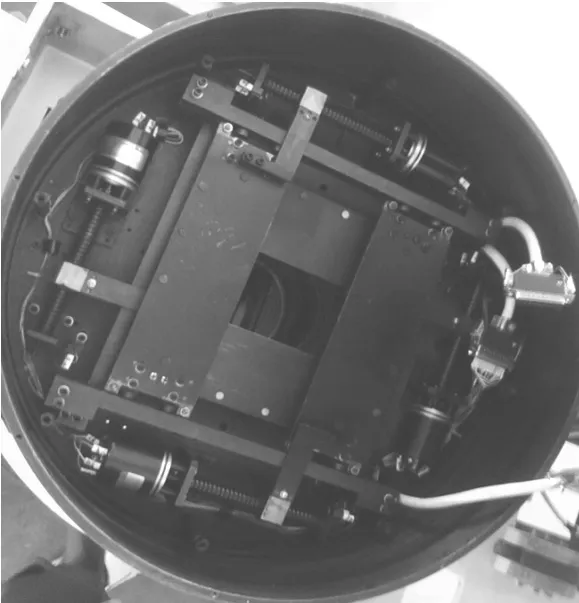
图1 限束器钨门机构Fig.1 Tungsten gate of radiation fi eld
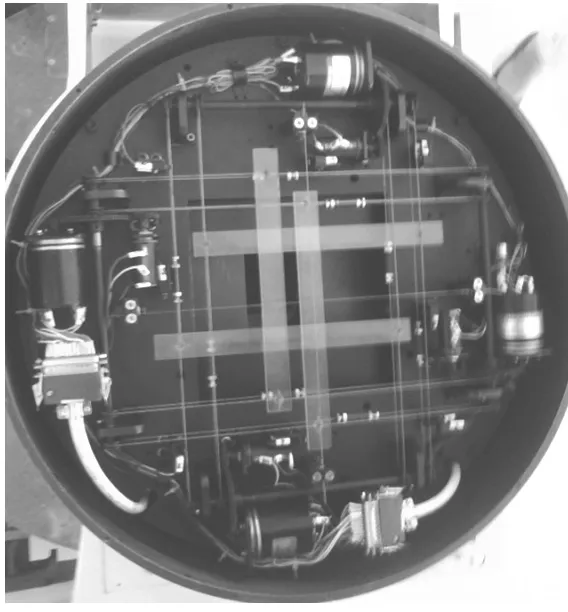
图2 限束器井线机构Fig.2 “#” type gate of delineator
2 辐射头运动机构驱动系统选择及可行性分析
模拟机辐射头部分总共有9个运动控制对象,钨门4个、井线4个、辐射头旋转1个、由于辐射头部分结构复杂、空间狭小、负载大、控制精度高、运行速度等,因此,钨门和井线驱动选择步进电机,辐射头旋转选择直流减速电机。
2.1 辐射头钨门井线驱动系统配置
步进电机是常用的驱动装置,其依据脉冲信号的频率和数量控制电机运转,其常用控制方式如图3所示。

图3 步进电机开环控制图Fig.3 Stepper motor open-loop control diagram
步进电机在正常工作时,电机的运转速度由控制脉冲的频率大小来决定,运转的角位移由输入的脉冲数量来决定。所以可通过改变输入脉冲的频率来控制电机转速,通过输入脉冲的数量来控制位移[4]。步进电机控制灵活,使用方便,且可实现较高的控制精度[5],特别适合转速不高且有较大转矩要求的运动控制。步进电机有三种不同的结构类型,其中混合式结构的转子使用永磁材料,定子和转子通过小齿组合在一体,这样可以提高旋转精度。它的特点是输出力矩大、动态性能好、控制精度高,适合模拟机钨门和井线控制要求。
步进电机结构简单、价格便宜,但是使用时必须要有环形分配器和功率放大电路,这给PLC控制带来不便,本文选用深圳步科生产的2S42Q-03848型两相步进电机和2M412型驱动器,通过实际使用,表现出良好的使用效果。2S42Q-03848型两相步进电机相电流1.2 A,静态扭矩0.32 N·m。2M412型驱动器是两相双极微型步进电机驱动器,供电电压最大可达40 V,采用双极型恒流驱动方式,可驱动两相双极性混合式步进电机。该驱动器提供半电流工作模式,可减少电机发热。采用专用驱动控制芯片,在模拟机转速范围内具有良好的矩频特性。该型驱动器具有最高可达256细分功能,保证了电机运行平稳的性能,在实际使用中表现出了良好的效果[6],可完全满足模拟机辐射头部分的运动要求。
辐射头钨门步进电机采用柔性联轴器与滚轴丝杆直接相连,丝杆导程4 mm,要保证钨门10 mm/s的移动速度,当步距角为1.8°,PLC输出脉冲频率至少为:

根据实验得出,细分倍数为10时,钨门运动状态平稳,此时PLC输出脉冲为5 kHz。
井线步进电机与平带轮之间采用齿轮连接方式,齿轮齿数比为17/41,皮带轮直径20 mm,井线运动要获得10 mm/s的移动速度,在驱动器细分倍数为10时的输出脉冲频率为:

本文所选择S7-200系列PLC可通过集成的PTO功能实现脉冲输出[7],与用单片实现的脉冲输出相比较,显得高效简单[8]。CPU226最大输出脉冲为20 kHz,满足本文中钨门和井线驱动要求,所以本方案切实可行。
3 辐射头运动系统电路设计
辐射头旋转直流电机控制方式较为简单,本文仅阐述钨门和井线运动的步进电机电气系统。根据模拟机临床操作使用习惯,钨门运动一般根据医师需要,采取手动控制,普通的开环控制方式足以满足控制要求,如图4所示。工作时,医师按照需要通过操作装置向PLC发出指令,PLC向步进驱动器发出方向和速度脉冲指令,步进驱动器接受PLC指令完成脉冲环形分配和驱动放大功能,驱动电机转动,直至PLC结束运转指令。
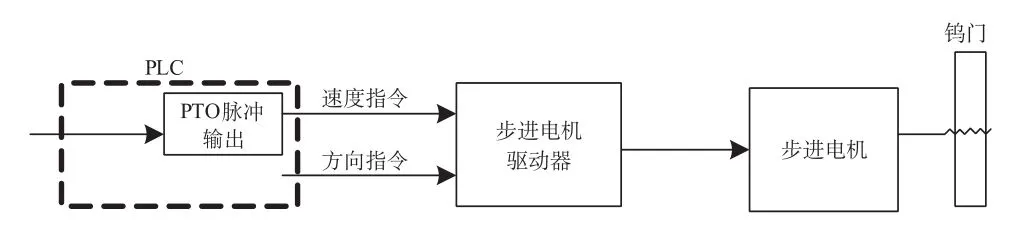
图4 钨门步进电机控制图Fig.4 Stepper motor of radiation fi eld control diagram
井线运动依据操作方式不同,有开环控制方式和闭环式控制,开环控制方式与钨门控制方式相同。闭环控制方式如图5所示,PLC接受目标位置数据后,与位置测量装置反馈的数据比较[10],首先判断需要运动的方向,然后根据与实际位置的偏差大小选择合适的运动速度。如果与实际位置偏差较大,按照设定的最高速度向目标位置运动;如果与实际位置偏差较小,则按照设定的最低速度向目标位置运动,当偏差小于设定值时停止运动。
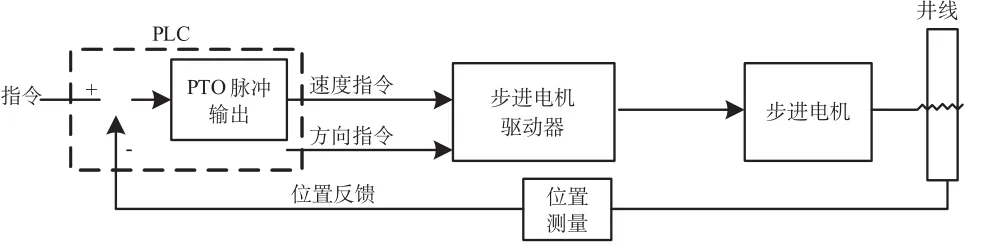
图5 井线步进电机控制图Fig.5 Stepper motor of delineator control diagram
钨门(X1X2Y1Y2)和井线(X1X2Y1Y2)的运动如图6所示,两两平行或垂直运动。 单拉时,只操作钨门和井线中的一个电机运动,运动根据手动指令或给定参数启动和停止。双拉时,运动根据手动指令或给定参数,钨门或井线中的X1和X2或者Y1和Y2,同步向靠近中心原点方向或同时向远离中心原点移动。在双拉控制时,分别以X1和Y1为主运动,X2和Y2为随动,参照X1和Y1实时位置参数,确定X2和Y2为随动时的方向和速度,当X1和Y1停止运动时,X2和Y2将在0.5 s内完成同步后停止,同步精度为0.2 mm(小于技术要求1 mm的精度)。此种控制方式便于实现,同时可以消除累积误差,达到精确控制目的。
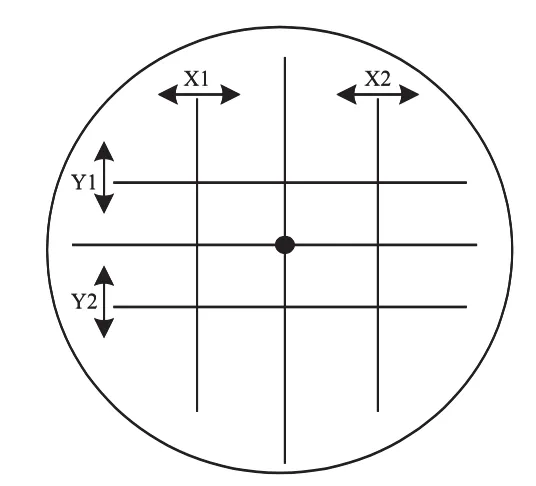
图6 钨门井线运动图Fig.6 Radiation fi eld and delineator motion diagram
一般在设计时,一台电机配置一台驱动器,但在实际操作中,钨门和井线是不需要同时运动的。本文结合模拟机实际运动特点,将原来需要的8台步进电机驱动器减少为4台,在相同位置方向上的钨门和井线电机分别共用一台驱动器,通过选择电路实时切换,如图7所示。 另外,由于西门子CPU226只有两个脉冲输出通道,在通过PLC向驱动器输出脉冲时,同样是通过自动选择电路,将脉冲信号分配给需要工作的驱动器。在进行双拉控制时,就只需要一个脉冲输出,实现脉冲信号一拖二驱动,这样既可以很好地实现两个步进电机同步运动,又可以最大幅度地节约成本和空间,这个方案在实践中证明是可行的。
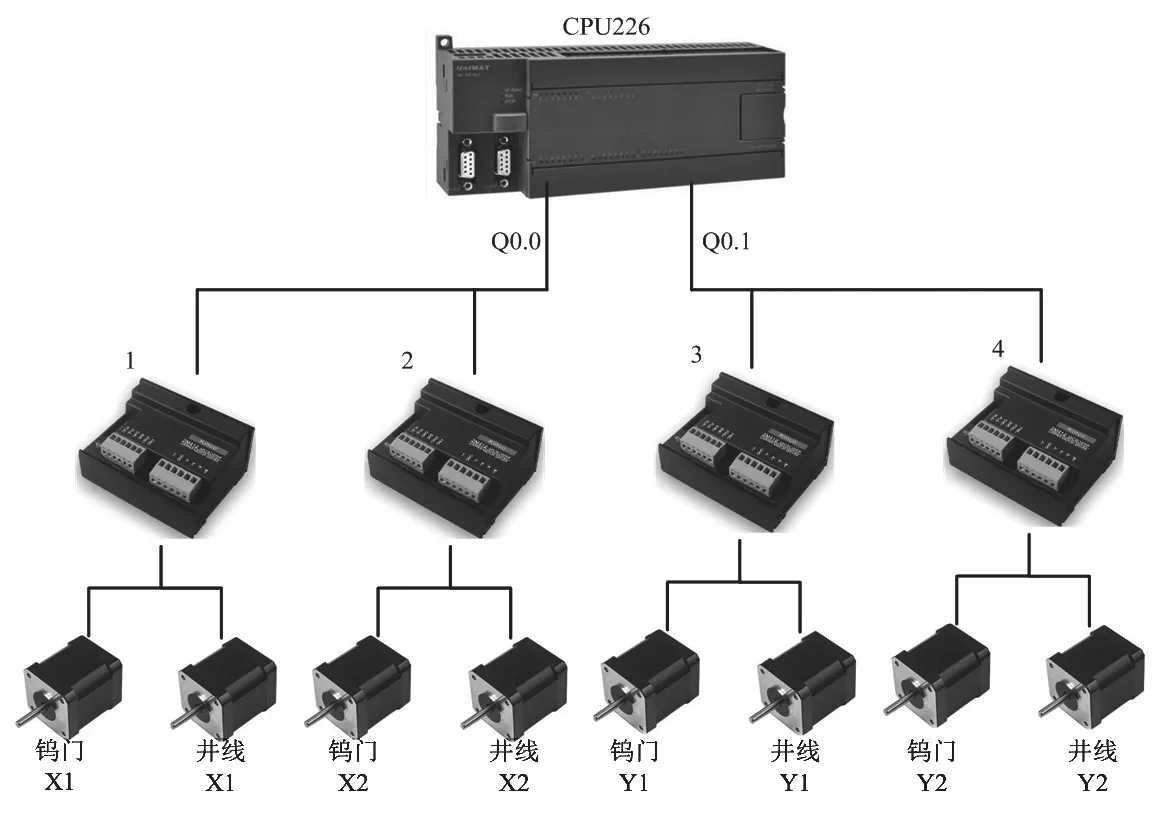
图7 钨门井线步进电机系统图Fig.7 Radiation fi eld and delineator stepper motor control diagram
2M412型步进电机驱动器内部控制电压为5 V,而PLC输出电压为24 V,如要能正常使用,必须在控制线路中串接一个2 kΩ的电阻(R1),否则将会使驱动器内电子元件损毁。在采用本文提出的一拖二解决方案时,由于采用并联分支电路,分配到两个驱动器的脉冲信号平均电压会低于5 V,这时可将电阻阻值减小到1.8 kΩ,即可实现稳定工作。
上文所提出的自动切换电路如图8所示,由PLC控制继电器来实现,脉冲信号切换发生在脉冲输出前,对电机控制没有任何影响。驱动器到电机的切换使用高功率控制继电器来实现,触点额定电流2 A,由于步进电机最大电流小于1.2 A,可以保证切换安全。
4 辐射头井线运动双拉同步程序设计
本文重点叙述井线同步控制PLC程序设计。在井线双拉控制中,要求两井线能够精确同步,误差不超过1 mm。前面虽然采取了一拖二电路设计,但是由于机械传动环节的误差,导致在手动操作双拉时,两井线并不能保持精确同步,本文设计了一种跟随式双拉同步控制程序,其流程如图9所示,本文以井线(X1、X2)双拉为例予以说明。

图8 钨门井线步进电机驱动电气原理图Fig.8 Radiation fi eld and delineator stepper motor drive electrical schematic
在进行双拉操作时,X1、X2通过一拖二电气回路开始运行。当双拉信号结束时,以井线X1位置数据为基准,将X1与X2位置数据进行比较。当X2大于X1时,PLC控制X2正向继续运行,当X2小于X1时,PLC控制X2方向运行,直至X2与X1差值绝对值小于0.5 mm时,程序结束。具体程序流程如图9所示。
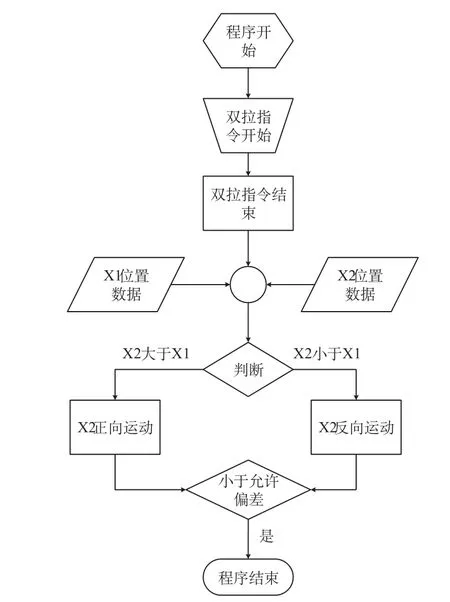
图9 跟随式双拉同步控制程序流程图Fig.9 Control program fl ow chart
5 临床应用
该系统通过国家检测机构型式试验,在BL-2型模拟机上应用时,结合数字影像系统的末尾帧图像抓取保存功能,可以完美实现跟随式井线界定方式。其工作方式如下:首先通过透视功能确定好肿瘤中心位置,通过数字影像系统抓去末尾帧图像,此时透视结束,X射线关闭。其次,医师可以在工作站界面中获取末尾帧图像,通过工作站叠加在图像上的标尺,确定肿瘤轮廓。再次,按照标尺显示的尺寸数据输入各井线位置数据,或者直接用鼠标将井线拖至肿瘤轮廓边缘,井线自动运行到设定位置。 最后,短暂打开透视功能,验证井线最终位置。这种操作方式,井线在移动中,透视功能是关闭状态,可减少患者70%的辐射量。在使用时,系统一方面读取井线位置数据,一方面仅将目标位置数据通过手动输入或者图形输入传送给模拟机控制系统,系统根据预定的设计程序,通过本文设计的辐射头控制系统快速控制井线运动到设定位置,这样缩短了定位时间,提高了定位效率。
6 结论
本文设计的模拟机辐射头控制系统,采用了一拖二步进驱动电路,以闭环控制方式,实现辐射头钨门和井线实时双拉同步控制。结合数字影像系统,该系统可以大幅减少患者在定位中所受辐射剂量,缩短模拟定位时间,同时也提高了模拟机辐射头控制精度,提升了治疗规划质量,降低设备成本,在临床中具有较高的应用价值。
[1] 夏小林, 林世寅, 刘玮. 常规放疗模拟机的日常质控目标和校准方法[J]. 医疗卫生装备, 2014, 35(12): 84-86.
[2] 秦伟, 陈飞, 时飞跃, 等. 模拟定位技术在放射治疗中的应用与发展[J]. 中国医疗设备, 2013, 28(12): 5-6.
[3] 胡逸民. 肿瘤放射物理学[M]. 北京: 原子能出版社, 1999.
[4] 刘志东. 基于倾角检测的电梯导轨垂直度检测机器人的研究[D]. 天津: 河北工业大学, 2010.
[5] 蔡寿将, 王培良.步进电机PLC控制系统在吊粒烫色技术中的应用[J]. 制造业自动化, 2012, 34(3): 37-40.
[6] 陈建进, 管兴勇. 两相混合式步进电机细分驱动器研制[J]. 微型机与应用, 2014, 33(4): 71-73.
[7] 沈宏, 张伟. 基于S7-200PLC的调速器步进电机驱动方法[J]. 制造业自动化, 2010, 32(7): 169-172.
[8] 工程师博客. 步进电机和伺服电机的性能综合比较[J].伺服控制,2013(2): 18-19.
[9] 赵轩, 韩毅, 秦绪鑫, 等. 基于PWM控制的模型车用小型直流电机调速装置[J]. 计算机工程与设计, 2009, 30(21): 4884-4887.
[10] 王晓瑜. 基于PLC及反馈电路的步进电机闭环控制系统改造[J].机床与液压, 2014, 42(16): 172-173.
Design of Control System of Radiation Head of Radiotherapy Simulator
【 Writer 】YU Ningbo
School of Hubei Three Gorges Polytechnic, Yichang, 443000
The paper designs a control system of radiation head of radiotherapy simulator. Using a driver to control two stepper motors, through the design of the PLC program, to achieve the simultaneous movement of the two delineators. It improves the control precision and saves the manufacturing cost of radiotherapy simulator. In clinical practice, it can improve the quality of treatment planning, and reduce patient X-ray exposure.
radiotherapy simulator, radiotherapy equipment, automatic control, stepper-motor control
R318.6;TH774
A
10.3969/j.issn.1671-7104.2017.05.019
1671-7104(2017)05-0381-04
2017-02-13
于宁波,E-mail: 16745608@qq.com