基于DD马达的低成本高精度角度传感器检测转台的设计
2017-10-11
(武汉船舶职业技术学院,湖北武汉 430050)
基于DD马达的低成本高精度角度传感器检测转台的设计
贾玉柱赵磊
(武汉船舶职业技术学院,湖北武汉 430050)
轴角传感器应用领域非常广泛,其精度和性能具有重要的作用,需要高精度的检测转台进行评估和标校。针对传统转台结构复杂、机加工难度大、工程成本高昂等问题,文本提出了利用DD马达和手动精密XY滑台相结合的方式,以STM32F107ARM芯片作为控制核心,设计了一种低成本、高精度、操作简便、通用性强的单轴轴角传感器检测转台,可自动对传感器轴角进行信息采集、误差分析及存储,经过实验验证,达到了设计目的,可适用于一般的科研院所和中小企业。
轴角传感器;DD马达;滑台
角度传感器适用于汽车、工程机械、宇宙装置、导弹、飞机雷达天线的伺服系统以及注塑机、木工机械、印刷机、电子尺、机器人、工程监测、电脑控制运动器械等需要精确测量位移的场合,其精度和可靠性对设备的性能有着重要和直接的影响。现在的角度传感器分门别类,生产厂家众多,怎样才能评测传感器的性能或者设计开发传感器?检测转台是必要的设备的。但一谈到转台,动则几十万到上百万,这对于中小公司和一般用户是无力承担的。本文设计了一款低成本高精度的轴角传感器检测转台。
1 DD马达
DD motor从字面上理解是直接驱动马达(direct driver),但实际上它并非是普通马达,而是一种结构非常复杂,高精度、高性能的特殊型交流马达。之所以称之为直接驱动,因为它采取转子和运动载体直接连接的方式,中间不再用其他的过渡连接(减速机构,联轴器等)。DD马达结构为外转子形式,与内转子结构的普通马达不同,特别是其采用的向心轴承可承受一定的轴向力。其编码器为光电型编码器,一般为500,000ppr以上,并带有原点和限位输出。由于高水准的制造工艺保证和高精度的测量反馈,此种马达的定位精度可达秒级[1]。本设计中采用NSK公司的M-PS3030KN002型DD马达,驱动器采用该公司的EDC-PS3030AB501,马达的回转位置检出器分辨率为2621440计数/圈,重复定位精度为±2″,绝对定位精度±45″。
2 硬件设计
2.1 转台结构设计
如图1中所示,检测转台主要由支撑架、DD马达(M-PS3030KN002)、DD马达驱动器(EDC-PS3030AB501)、导电滑环、xy高精度滑台、千分表、上下死顶和带液晶的控制器组成。支撑架起到固定上述设备,保证初始粗精度,设计成一边开放式结构,便于传感器的安装、调试;DD马达既能带动被测角度传感器旋转,又起到高精度数字分度头的作用,其内部的光栅角度传感器,具有足够高的精度,可用于市面上绝大部分角度传感器的标校。DD马达驱动器采用优化的PID算法,对马达可进行绝对角位移控制和增量控制两种形式,使用灵活、控制精度高;导电滑环解决旋转过程中,防止绞线的发生,可多圈、高转速测试传感器,保障带电测试的安全性。上下安装的XY滑台,可在5mm范围内移动死顶,改变角度传感器上下端轴与DD马达的同心度问题,结合千分表可使同心度的偏差在0.1丝以内;控制器主要是向DD马达发送控制指令,采集记录反馈的DD马达和被测角度传感器的轴角,并向上位机发送数据,液晶可显示采样结果,方便人员实时监控,经过合理的编制控制程序,整个设备可无人值守,解决了检测人员劳动强度大的问题。
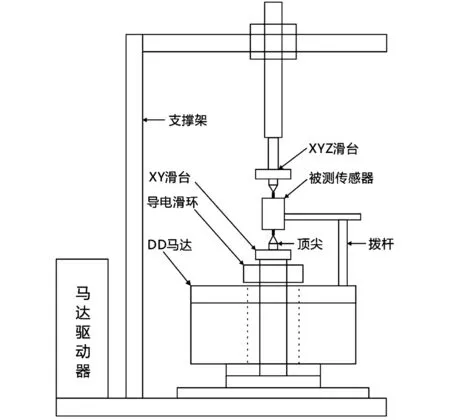
图1 检测转台结构图
2.2 电路设计
电路主要由STM32F107ARM核心电路、解码电路、RS-232通信电路、按键控制电路、液晶显示电路、SD卡存储电路、电源电路组成,如图2所示。 STM32F107是意法半导体公司生产的具有ARM32位Cortex—M3内核的一款芯片,主频可达72MHz;Flash的容量从64~256K,SARM的容量为63K;具有丰富的通信资源,最多有5个USART串口,3个SPI口,2个CAN口,1个以太网口。以此芯片为控制器,可运行较为复杂的算法,对传感器进行标校和评估。解码电路是把被测传感器输出的角度信息转化成STM32F107所能接受的形式。RS-232通信电路是建立控制器和DD马达驱动器的通信接口。按键控制电路是输入控制指令。液晶显示电路是显示轴角的标校信息。SD卡存储电路可以对标校信息进行存储,可以无人值守,进行连续检测。电源电路可以提供所有电路所需要的直流电源,直流电有24V、12V、5V、3.3V四种,24V是供给DD马达驱动器的控制输入端,12V供给轴角传感器,3.3V供给STM32F107ARM核心电路,5V供给剩余电路。
2.3 RS-232串口配置
驱动器可工作在串口命令方式、脉冲驱动方式和程序方式,因串口驱动方式最全面,即可灵活地改变参数设置,又可得到丰富的位置反馈信息,所以本设计中采用串口的控制方式。EDC-PS3030AB501的RS-232串口的参数为9600bps、8位数据、2位停止位、无校验位、采用ASCII码。RS-232串口的线路定义上与常见的不同,如图3所示。ARM中的RS-232通信,只需要TXD、RXD和GND三根线即可,因此对图3中的线路进行改造,保留图3中电脑端的2、3、5号线,分别与驱动器端的1、3、6相连,把驱动器端的2、7号短接,即可保证正常通信[2]。
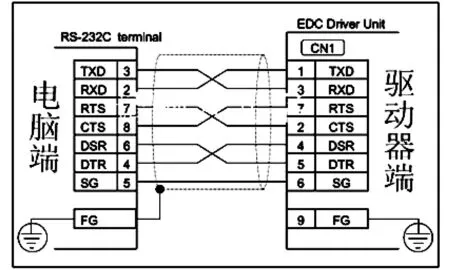
图3 RS-232串口接线图
2.4 CN2输入输出口配置
有了以上的设置还不能驱动DD马达,必须对驱动器EDC-PS3030AB501的CN2输入输出口进行合理的配置。CN2口的定义如图4所示。需要将1、2针腿接24V电源正极,3、5、6、7针脚接24V电源负极。对驱动器进行220V交流供电后,驱动器面板上的单数码管将会显示一个O、绿灯亮,表示驱动器可以正常工作了,配置不正确就会显示故障代码,同时红灯亮。完成以上的配置,就可以通过串口发送ASCII码指令,对DD马达进行灵活控制了。
配置正确后,初始上电,RS-232串口上位机就会收到驱动器的信息:
: NSK MEGATORQUE
XSYS3030.2,X0P0
DC1A80_0008.7
:
向驱动器发送命令,例如“IR10RN�”,正常情况会得到驱动器的相同ASCII码的回应。
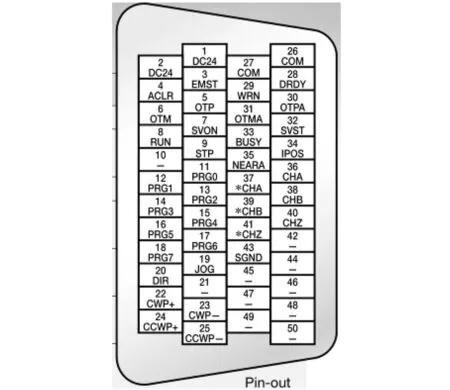
图4 驱动器EDC-PS3030AB501的CN2针脚定义图
3 软件设计
软件主要分为DD马达驱动控制、DD马达轴角信息采集、被测角度传感器角度信息采集、角度信息比对及处理等部分组成。DD马达驱动器已经做的相当完备,我们只需要按照驱动器的数据手册,发送ASCII码指令就可对DD马达进行驱动控制。以NSK的EDC-PS3030AB501为例,通过串口发送“IR1”,驱动器就会驱动马达按增量的方式顺时针转动1个步距,可以把它当成步进电机使用,整圈可细分成2621440步,因此每步距代表360°/2621440,足够对常用的角度传感器驱动控制;发送“IR-1”时,DD马达将逆时针转动一个步距。对14位精度的轴角传感器进行检测,DD马达每次走160步,即发送“IR160”。也可采用绝对位置控制,发送“AR160”,驱动器将以捷径的方式把DD马达推到自身的160脉冲位置处,可通过“TP”命令将当前的绝对位置读出。本设计中采用增量的方式,进行标校。
软件的流程如图5所示,首先利用传感器信息采集程序采集当前的角度值,并根据当前的位置值,发送控制指令完成找“零”,这个“零”是指被测传感器的“零”而不是DD马达的;然后根据被测传感器的精度,送出合理的步距,按增量的方式进行驱动控制;每走出一步后程序完成DD马达轴角信息采集、被测传感器信息采集、信息的比对、存储并发往上位机;因为导电滑环的作用,不必担心缴线的危险,测试完一圈后可连续测试多圈,采集到充分的数据,以便后续的分析和处理。
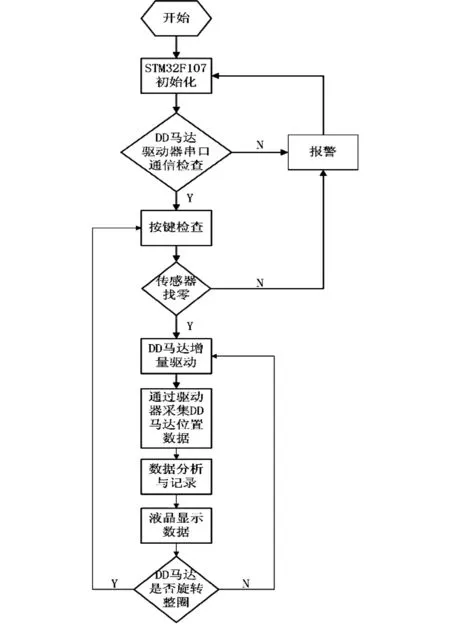
图5 检测转台软件流程图
4 实验分析
首先对测试转台进行了位置重复定位精度的实验,因为这是轴角测试的基础,没有重复定位精度,检测和标校将无从谈起。在DD马达上随机选取了4个不对称的位置,每个位置按照增量步进的方式连续推动100圈,检测初始位置和最终位置的偏差。经过检测,NSK的DD马达的重复定位精度确实很高,达到±2″。

图6 实验结果图
有了上述基础,对国内某厂家的自整角机轴角数字采集模块[3]进行了测试。测试方法:对自整角机进行360°轴角、分辨率为14位的精度检测,每组数据从自整角机的电气零位开始,DD马达按照14位的分度为步距,增量驱动自整角机旋转,采集轴角数字模块的值,与DD马达的累积步距相减,图6纵坐标就是差值,横坐标为DD马达的累积步距总数为16384,即把360°的轴角进行14位精度划分。图6中总共进行了10组数据的叠加,误差码都在5个码以内,而轴角采集模块的精度为5个码,充分说明DD马达的重复定位精度很高,可以用于轴角传感器的检测。
5 结 语
本文提出了一种低成本高精度的轴角传感器检测转台,该转台采用高精度滑台移动顶尖的方法解决了同轴度的问题,极大地降低了工程成本,并且利用DD马达的高精度角度控制能力,建立了高精度的传感器标校基准。经过实验检验可行,可在一般科研单位和中小企业的轴角检测中应用推广。
1 梁军才.DD马达原理应用介绍[EB/OL].http://wenku.baidu.com/view/430a79247375a417866f8f43.html?from=search,2012-10.
2 NSK MEGATORQUE? MOTOR SYSTEM User’s Manual (EDC Driver Unit System) [EB/OL].Copyright 2011 by NSK Ltd., Tokyo, Japan.
3 周岗,陈永冰,李文魁等.自整角机/旋转变压器轴角模数解算方法[J].海军工程大学学报,2013(25):25-29.
Abstract: Axis angle sensor is widely used in many fields, and its accuracy and performance are of great importance, therefore there is a need for high-precision detection turntable for evaluation and calibration. According to the complicated structure, difficult machining and high engineering cost, this paper proposes a method of using DD motor and manual precision XY slide table, and STM32F107ARM chip as the control core to design a low-cost, high-precision, easy -to- operate, versatile single-axis shaft sensor detection turntable.The turntable can automatically measure the sensor shaft angle information, error analysis and storage, after experimental verification, to achieve the purpose of the design, applicable to the general research institutes and small and medium enterprises.
Keywords:axis angle sensor; DD motor; slide
(责任编辑:谭银元)
DesignofaLowCostandHighPrecisionAngleSensorDetectingTurntableBasedonDDMotor
JIAYu-zhu,ZHAOLei
(Wuhan Institute of Shipbuilding Technology,Wuhan 430050, China)
U463.2
A
1671-8100(2017)03-0027-04
2017-02-16
贾玉柱,主要从事电子与电气方面的教学和科研工作。
