基于SVPWM的BLDCM转子位置估算方法研究
2017-10-10周焰红应展烽杨忠浩张雪芹
周焰红,应展烽,杨忠浩,张雪芹
(1.南京理工大学能源与动力工程学院,江苏 南京 210094;2.国电南京自动化股份有限公司,江苏 南京 210032)
基于SVPWM的BLDCM转子位置估算方法研究
周焰红1,应展烽1,杨忠浩2,张雪芹2
(1.南京理工大学能源与动力工程学院,江苏 南京 210094;2.国电南京自动化股份有限公司,江苏 南京 210032)
在采用电压空间矢量(SVPWM)控制策略的电机控制系统中,转子转速和位置估算极为重要。为提高估算精度,针对基于低分辨率位置传感器的电动车用无刷直流电机系统,提出了基于霍耳扇区时间跟随方法的电压空间矢量控制策略。随后,利用Matlab/Simulink仿真平台,建立了基于电压空间矢量控制策略的无刷直流电机仿真模型,仿真结果表明,霍耳扇区时间跟随算法与多区间平均测速法相比,实时性和动态性能较好,并且具有较强的抗干扰性。最后,搭建了以STM32F303为核心的实验平台,对提出的算法进行了实验验证,结果表明,该算法能够有效提高电机转子位置和转速估算精度。
电动车用无刷直流电机;电压空间矢量;转子位置;霍耳扇区时间跟随算法
Abstract:As the SVPWM is applied to motor control system widely,the estimation of rotor speed and position is vital.To improve the accuracy of estimation,a SVPWM control strategy based on Hall sector time tracing algorithm was proposed,which was aimed at electrombile BLDCM system upon low-resolution position sensors.Then,BLDCM simulation model based on SVPWM control strategy was built by Matlab/Simulink.The simulation reveals that Hall sector time tracing algorithm has a good real-time and dynamic performance,and has strong anti-disturbance capacity,compared to measuring method of intervals average velocity.Finally,experimental platform based on STM32F303 was designed,and the proposed algorithm had been researched by experiments.Result validate the algorithm can increase estimation accuracy of motor rotor speed and position.
Key words:electrombile brushless direct current motor;space vector pulse width modulation;rotor position;Hall sectortimetracingalgorithm
随着抑制转矩脉动和降低运行噪音要求的逐步提高,基于空间电压矢量脉宽调制的正弦波控制策略被逐步应用于无刷直流电机(brushless direct current motor,BLDCM)控制系统中。在空间矢量控制中,电机转子的实时位置信息是实现控制策略的重要参数。
一般来看,电机转子位置可采用无霍耳传感和有霍耳传感2类方法获得。无霍耳传感方法存在实现复杂、需转子初始定位和起步力矩不足等问题[1-3]。因此在工程中,多数BLDCM仍装有霍耳传感器[4-7]。然而,霍耳传感器的数量通常极为有限,无法获得高分辨率的转子位置信息,不利于空间矢量控制的实现,故有必要研究转子位置估计算法,提高转子位置判断的精度。
目前,工程中常用的电机转子位置估计算法主要有零阶估算法、一阶估算法和多区间平均测速法(以下简称为平均法)等。其中,零阶估算法利用相邻时刻的霍耳信号变化对电机位置进行估计,当电机匀速运行时,该方法具有较高精度,但当转子转速发生突变时,由于仅利用上一个霍耳扇区信息进行估计,该方法存在一定误差[8-10]。在零阶估算法的基础上,一阶估算法将加速度变量引入转子转速和位置的估算中,理论上能够有效地提高加减速状态下转子位置的估算精度,但该估算方法计算量较大,不易于实现[8-9]。此外,零阶和一阶估算法抗干扰能力较差,当霍耳信号因电气噪声或转子机械抖动产生干扰时,上述算法所得转子位置精度将严重下降。平均法取前几个霍耳扇区时间平均值作为下一个霍耳扇区时间值,可通过平均运算减小因霍耳信号干扰所造成的转子位置估算误差[10]。但是,平均运算会带来一定的转子位置估计延迟,无法在电机加速和减速过程中准确跟踪转子位置,动态特性不佳。
为此,本文提出了一种基于相关性分析的转子位置估算方法。该方法能够利用之前时刻下霍耳扇区时间的相关性,准确判断电机的加减速状态,并以此对下一时刻的转子位置进行补偿,提高转子位置估计的抗干扰性。仿真与实验结果表明,即便霍耳扇区时间受到干扰,该方法也能为BLDCM空间矢量控制提供较为精确的转子位置信息。
1 BLDCM空间电压矢量调制
1.1 空间电压矢量控制策略
空间矢量控制是为模仿直流电机解耦控制而提出的一种新的控制思想,实质是控制定子电流矢量幅值和相位。目前,常用的矢量控制策略主要有Id=0控制、cosφ=1控制、定子电流最小控制和恒定磁链控制等。其中,Id=0控制方法简单,系统转矩特性好、脉动小,可以获得较宽的调速范围。本文研究的矢量控制系统为基于转速环和电流环的Id=0控制策略,其基本原理如图1所示。
霍耳传感器检测转子霍耳信号,由此估算出转速ω和角度θ,θ用于坐标变换,ω与给定转速ω0共同参与转速PI调节。电机输出的三相定子电流经坐标变换后,分别以Id和Iq的形式参与电流环控制,经PI调节器和坐标变换后输出电压参考值,输入到SVPWM模块,产生控制开关管开通和关断的PWM信号,从而实现无刷直流电机的空间电压矢量控制。
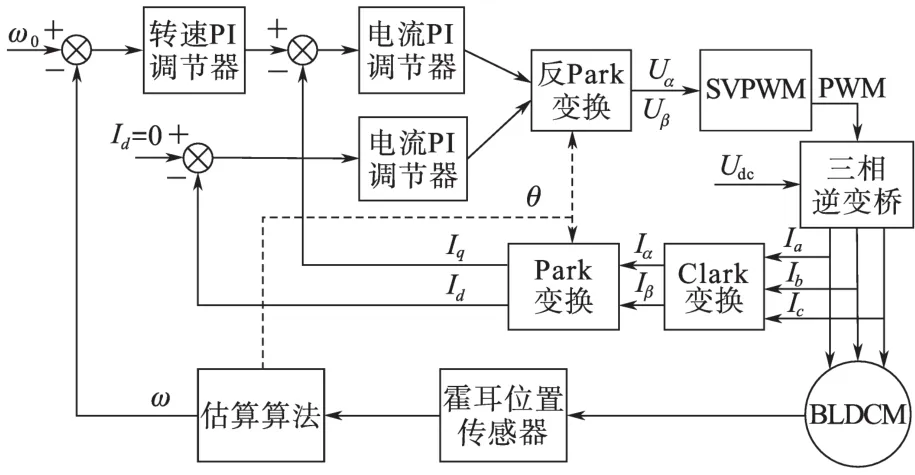
图1 空间电压矢量控制系统结构图Fig.1 The structure of SVPWM control system
1.2 转子位置测量误差分析
由上述分析可知,无刷直流电机空间电压矢量控制是在d-q坐标系下完成的,其中,实现三相静止坐标到d-q坐标的Clark和Park变换关系式如下式:

可以看出,电机转子角度位置的测量精度直接影响电流转换后的准确性,假设检测到的转子位置出现偏差Δθ,即

式中:θ′为检测到的转子位置;θ为实际转子位置。
将式(3)代入式(2),可得电流换算结果为

稳态时,换算得到的电流应分别与给定值Id0,Iq0相等,即

由式(4)和式(5)可得实际电流值为

本文采用Id0=0控制策略,因此实际电流可简化为
则实际得到的电流误差为

可以看出,电机转子角度位置信息估算偏差会使得交、直轴电流产生波动,从而引起转矩脉动,影响整个控制系统性能。因此,转子转速和位置估算是整个系统的重要环节。
2 基于扇区时间跟随的转子位置估算法
霍耳扇区时间跟随方法基本思想是:利用前若干个霍耳扇区时间,结合相关性分析,对电机的加减速运行状态进行判断,再通过扇区时间补偿方法,得到当前扇区时间估计值,并以此计算转子转速及位置信息。
为判断电机当前的加减速状态,根据相关性分析理论,由前N个霍耳扇区时间值与其对应的换相时刻值,可得出其相关系数ρi:

式中:Ti为当前第i个扇区转子的运行时间。N通常取1个电周期内霍耳扇区数量的倍数,本文取N=6。
根据相关系数,定义符号函数S:

为减小单次检测误差,当前扇区时间补偿量可定义为


至此,根据零阶估算法即可得到下一个扇区电机转子转速和位置信息:

式中:θHall(i+1)为下一个0霍耳扇区的起始位置;Ts为采样周期;k为采样次数。
霍耳扇区时间跟随方法中相关性分析可有效抑制霍耳信号扰动的影响,准确判断出电机的加减速状态,从而克服了零阶估算法抗干扰能力较差的问题。而扇区时间补偿可以有效提高转子位置跟踪速度,克服了平均法检测信号偏差较大的问题。
3 仿真验证与分析
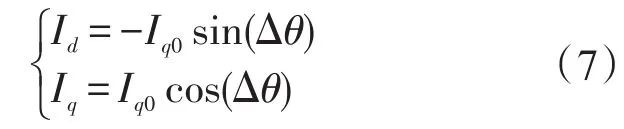
本文构建了如图2所示的仿真模型。
图2 基于SVPWM的无刷直流电机矢量控制系统图Fig.2 The BLDCM control system based SVPWM control strategy
在电机加速且有扰动的情况下,分别对零阶估算法、平均法和霍耳扇区时间跟随方法进行了仿真分析。仿真中,对霍耳信号随机加入干扰,且负载转矩在0.5 s时由初始值15 N·m突变为18 N·m。不同算法所得的转子角度估算误差见表1,所得仿真结果如图3所示。

表1 转子角度估算误差Tab.1 The estimation error of rotor angle

图3 不同估算方法仿真结果对比图Fig.3 Simulation results of different estimation methods
由图3a可以看出,电机在加速且有霍耳信号干扰的情况下,零阶估算法所得霍耳扇区时间存在较大偏差,与之对应的转速也产生了较大的波动(见图3b、图3c),进而导致较大的转子角度误差(见图3d、图3e)。其中,最大的转子角度误差可达0.15 rad,约占1个扇区角度的14.32%,平均相对误差可达5.92%。
接续邓小平所开辟的中国特色社会主义道路,以江泽民为核心的党的第三代领导集体,确立了社会主义市场经济体制,深化了对中国特色社会主义的认识,捍卫了中国特色社会主义道路。江泽民明确指出:“中国的社会主义既不是苏联模式,也不是东欧模式,而是有中国特色的社会主义。走这条道路,是中国人民经过一百多年的奋斗与探索作出的历史性抉择。”[3]P163在1997年召开的中国共产党第十五次全国代表大会上,江泽民代表党中央提出了社会主义初级阶段的基本纲领,把建设中国特色社会主义经济、政治、文化作为统一的奋斗目标。
类似地,平均法虽受霍耳信号扰动影响较小,但由于霍耳扇区时间跟随速度较慢,故所得转子角度同样具有较大误差。在加速阶段,相应误差最大值可达1个扇区角度的23.87%,平均相对误差约为7.16%。
由图3f相关系数曲线可知,电机在加速阶段虽存在干扰,但相关系数一直小于零,即电机仍被判定为处于加速阶段,因此扇区时间跟随法能够对霍耳扇区时间进行有效补偿,从而使得转子转速和角度估算误差减小。扇区时间跟随法所得转子角度估算误差最大为11.46%,平均相对误差约为5.16%。
上述结果表明,扇区时间跟随方法在电机加速情况下能够兼顾转子位置跟踪的抗干扰性与快速性,提高转子位置估算精度,为空间电压矢量脉宽调制提供较为准确的转子位置信息。
4 实验验证与分析
4.1 硬件系统架构
为验证基于霍耳扇区时间跟随法的电动车用无刷直流电机空间电压矢量脉宽调制策略的可行性,本文设计了如图4所示的硬件系统。该系统以STM32F303微处理器为控制核心,其外围电路包括电源模块、功率管驱动电路、三相逆变全桥、电流检测电路、短路硬件保护电路和信号检测模块等。

图4 电动车用无刷直流电机控制系统结构框图Fig.4 The structure diagram of electrombile BLDCM control system
4.2 实验结果与分析
本实验选用650 W,2对极的电动车用无刷直流电机,所得结果如图5~图7所示。其中图5、图6分别为三相逆变器下桥臂驱动波形和A相电流波形,符合空间电压矢量控制要求。由此可见,本设计能够较好地实现无刷直流电机的正弦波控制。图7为采用零阶估算法、平均法、霍耳扇区时间跟随法所得转子角度实测波形。3种算法在电机加速初期,估算的转子位置均有较大滞后性,电机转速提升后,零阶估算法和扇区跟随法效果较好,但零阶估算法易受霍耳信号影响,波动较大,所得结果与仿真结论相同,即本文提出的扇区时间跟随方法具有抗扰动能力强和跟随速度快的优点。

图5 下桥臂三相驱动波形Fig.5 The three-phase driving waveforms of lower bridge
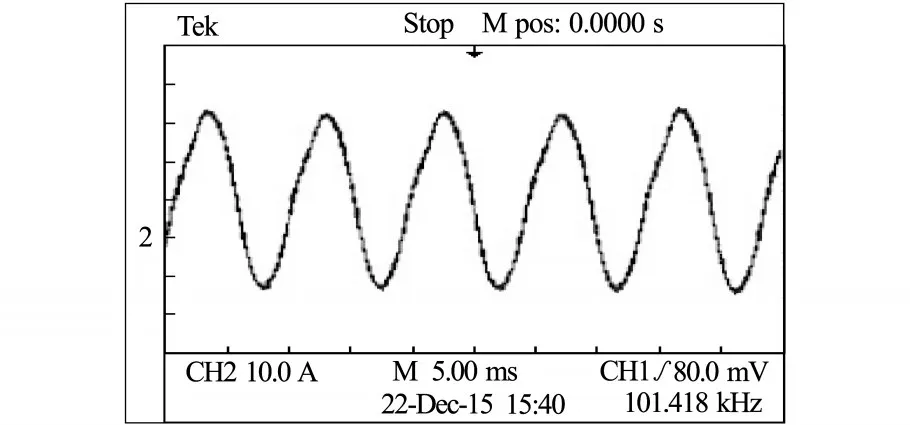
图6A相电流波形Fig.6 The current waveforms of phaseA

图7 不同估算法下转子角度实测波形Fig.7 Measured waveforms of rotor angle under different estimation methods
5 结论
本文通过对正弦波控制策略下无刷直流电机转子位置估算方法的研究,提出了霍耳扇区时间跟随方法,并进行了相关仿真和实验,可得如下结论:
1)与零阶估算法相比,扇区时间跟随法能有效减小因霍耳信号干扰所造成的转子位置估算误差。与多区间平均测速法相比,该方法能提高转子位置估算的快速性。因此,霍耳扇区时间跟随法能够兼顾转子位置跟踪的抗干扰性和快速性,提高转子位置估算精度,具有较好的工程实用价值;
2)本文所提出的霍耳扇区时间跟随法应用于电动车用无刷直流电机空间电压矢量脉宽调制系统中,能够较为准确地检测电机转子位置,从而有效抑制转矩脉动,提高控制系统性能,同时也验证了霍耳扇区时间跟随法的工程实用性。
[1]Li Q,Wang R.Study on Rotor Position Detection Error in Sen⁃sorless BLDC Motor Drives[C]//IEEE International Power Electronics and Motion Control Conference,2009,3:1-5.
[2]吴春华,陈国呈,孙承波.一种改进的无刷直流电机无位置传感器检测技术[J].电气传动自动化,2005,27(3):31-33.
[3]秦峰,贺益康,刘毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.
[4]邹继斌,徐永向,于成龙.正弦波无刷直流电机的新型转子位置检测方法[J].中国电机工程学报,2002,22(12):47-49.
[5]许振伟.基于低分辨率传感器的PMSM伺服系统[J].电工技术学报,2004,19(10):38-41.
[6]李颖,马瑞卿,刘冠志,等.一种基于SPWM的无刷直流电动机驱动新方法[J].微电机,2010,43(1):42-45.
[7]Giulii Capponi F,De Donato G,Del Ferraro L.Brushless AC Drive Using an Axial Flux Synchronous PM Motor with Low Resolution Position Sensors[C]//IEEE Power Electronics Spe⁃cialists Conference,2004,3:2287-2292.
[8]Capponi F G,De Donato G,Del Ferraro L,et al.AC Brushless Drive with Low-resolution Hall-effect Sensors for Surfacemounted PM Machines[J].IEEE Transactions on Industry Applications,2006,42(2):526-535.
[9]Shen J X,Zhu Z Q,Howe D.PM Brushless Drives with Lowcost and Llow-resolution Position Sensors[C]//Intreational Power Electronics and Motion Control Conference,2004,2:1033-1038.
[10]栾捷,陈阳生.基于低分辨率位置传感器的电动汽车用轮毂电机的控制[J].机电工程,2013,30(5):524-529.
Research on Estimation Method of BLDCM Rotor Position Based on SVPWM Controller
ZHOU Yanhong1,YING Zhanfeng1,YANG Zhonghao2,ZHANG Xueqin2
(1.School of Energy and Power Engineering,Nanjing University of Science and Technology,Nanjing210094,Jiangsu,China;2.Guodian Nanjing Automation Co.,Ltd.,Nanjing210032,Jiangsu,China)
TP351
A
10.19457/j.1001-2095.20170903
周焰红(1991-),男,硕士在读,Email:njust11zyh@163.com
2016-09-22
修改稿日期:2016-11-01
