基于各向异性磁阻的车型识别算法*
2017-10-10孙晓夏运贵
孙晓,夏运贵
(湖南工业大学电气与信息工程学院,湖南株洲412007)
基于各向异性磁阻的车型识别算法*
孙晓,夏运贵
(湖南工业大学电气与信息工程学院,湖南株洲412007)
在分析已有的各种车辆检测技术和车型识别算法的基础上,为了提高车型识别的高效性和准确度,提出采用各向异性磁阻传感器检测技术。首先,利用动态基值法来抑制AMR的漂移,然后对原始波形进行小波转换来滤波降噪,再从处理后平稳光滑的波形中提取特征向量,最后代入模糊识别算法计算得出车型。实验结果表明,基于各向异性磁阻的车型模糊识别算法对车型识别准确率达99%.
各向异性磁阻检测器;小波转换处理;特征提取;模糊识别
当前,我国的交通信息检测技术主要有超声波、红外、视频传感器以及地磁线圈探测仪[1],但存在易受环境影响或安装维护不便等缺陷,而各向异性磁阻传感器(Anisotropic Magneto Resistive,AMR)作为一种先进的、稳定准确的传感系统,以体积小、低功耗、低成本、安装维护方便灵活、可靠性高等优点,能较好地弥补以上检测技术的不足。车型识别方法有计算车长归类法、模式匹配法、人工神经网路算法等,这些方法要么粗糙,要么实时性不好,其识别的准确率均偏低。现介绍一种能充分利用AMR检测波形各种信息的模糊识别算法,实现车型快速、准确识别。
1 AMR传感器检测技术
1.1 检测原理
AMR磁阻传感器是利用镍铁导磁合金的磁阻效应,镍铁导磁合金的电阻值与偏置电流(I)和磁场矢量(M)之间的夹角存在函数关系,由镍铁合金薄膜片沉积于硅晶片表面的电阻组成惠斯通电桥,从而将磁场的变化转换为差分电压的形式输出[2]。
AMR传感器能准确检测出地磁场强度和方向上万分之一的变化。而铁磁性物体会扰动原磁场的分布,铁磁物体的结构及质量不同,所引起的扰动也不同。因此,不同类型的车辆产生的地磁干扰也不一样,利用这个特征可以检测车辆的存在和进行车型识别[3]。
1.2 检测方法
本文采用Honeywell公司生产的AMR传感器HMC1001/100系列,将X,Y,Z三维方向的单个传感器集成在TI公司生产的CC2530芯片上。其安装和车辆的方向如图1所示,其中,X轴为车辆驶向停车位的方向,Y轴与X轴成逆时针90°并且在同一水平面,Z轴垂直水平面向上。
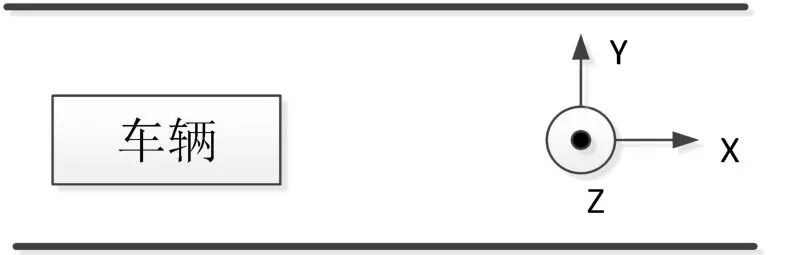
图1 AMR传感器安装示意图
车辆是金属结构,可以简化为磁偶极子,一个标准磁偶极子产生的磁场影响如式(1)[4]:

式(1)中:μ为磁导率;m为车辆的磁矩矢量;r为AMR传感器指向车辆的位置矢量,r为r的模。
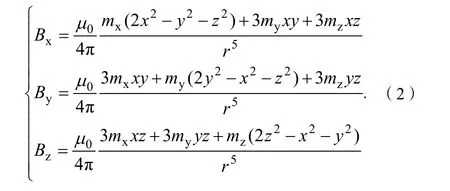
令m=(mx,my,mz),分别得到X,Y,Z轴3个方向上的磁场强度分量Bx,By,Bz,如式(2):
2 检测波形处理
2.1 抑制基频漂移
一方面,AMR传感器检测的磁场强度如果超过±6×10-4T的范围,AMR传感器就会产生磁滞现象,需要采用置位/复位法消除磁历史的影响来消除磁滞现象,置位/复位脉冲电路如图2所示。
另一方面,AMR传感器检测基值会受温度的影响而漂移,需要采用动态基值法对AMR传感器进行校正。具体方法:传感器启动阶段在无车的情况下连续采集n个磁强信号H(1),H(2),H(3),…,H(n),取平均值,再对当前及前N-1个信号取均值为A(k),如式(3)所示,使基值在无车的情况下进行更新,而出现较大扰动疑似有车时保持不变,如式(4)所示。
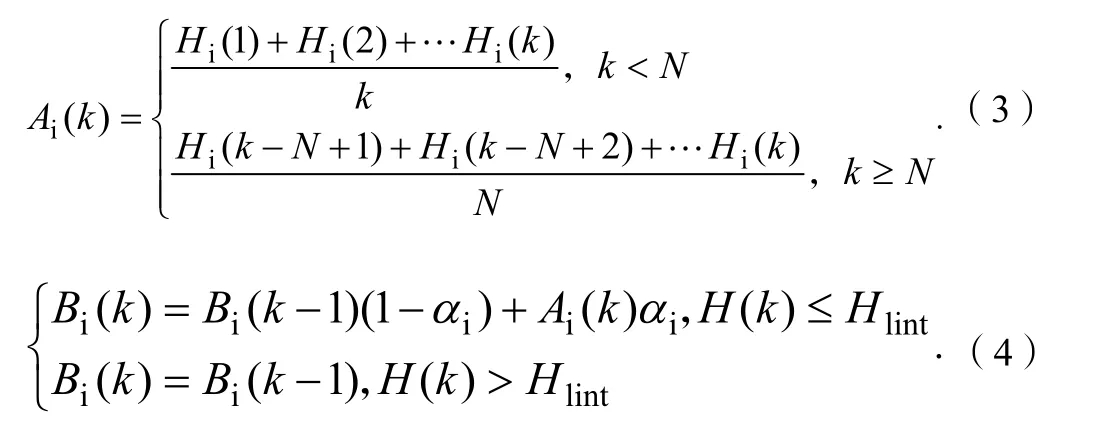
式(3)(4)中:i∈(x,y,z),进而可分别得到X,Y,Z方向上的值;Bi(k)为动态基值;αi是加权系数,其取值决定基值受扰动的影响和更新速度。
2.2 小波转换滤波

将信号利用小波滤波器H,G和h,g进行分解和重构,分解算法如式(5)。对小波低半频作多层分解,较低一层的低频部分是与它相邻的上一层低频部分的低半频带,较低一层的高频部分是与它相邻的上一层低频部分的高半频带。这样就将原信号划分成多个子带,由算法得到小波系数,再将小波系数代入重构算法(6),便可以重构原信号[5]。

式(5)(6)中:t为离散时间点的采样序号;f(t)为原始信号;j为层数,j=1,2,…,J,J=log2N;H,G为时域函数小波分解滤波器;Aj为信号f(t)第j层近似部分的小波系数;Dj为信号f(t)第j层细节部分的小波系数。
3 车型识别
由AMR检测车辆的波形分析得出不同的车辆因本身结构不同,所以产生的波形曲线不同,曲线的大小形状跟车长、车速、轴数、车高和发动机位置有关,因此,车型识别算法就是找出车辆参数与波形间的关系。车型识别步骤见图3.
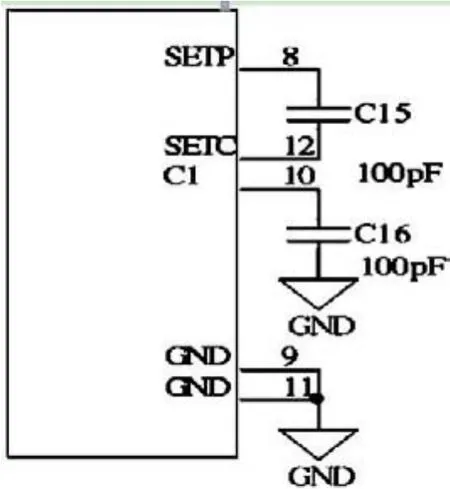
图2 置位/复位脉冲电路

图3 车型识别系统流程
3.1 建立模糊规则
在对车辆分类建立模糊规则时,选取能唯一表示某类车辆的特征值至关重要。通过对AMR检测波形的分析,提取特征向量为:车长、车高、磁能量、波峰/波谷、波峰数、最大值时间比、最小值时间比。获取大量车型样本,通过核聚类的方法计算每类车型的核,计算公式如下:

代入样本,从而得出车型模糊识别规则。
3.2 模糊识别算法
根据AMR检测波形特征,选用正态分布隶属度函数,将提取的特征值变为模糊特征,然后用距离模糊度算式来计算待测车型与已知车型的距离,距离模糊度算式如下:

式(11)(12)中:X为待识别的特征向量;Yi为隶属度向量;di为距离模糊度。
如果dk=min{d1,d2,…,dn},则所测车型属于k类。
4 算法验证
4.1 小波变换去噪实验
AMR传感器检测的原始波形和经小波变换后的波形对比如图4所示。

图4 小波变换前后波形对比
从图4可以看出,信号经过小波变换与拟合重构后,曲线平稳,降噪效果明显,有利于提取车辆特征。
4.2 车型模糊识别实验
实验初期,对于微型车的初始化,核函数Ki的初始参数iμˆ为(310,150,3 500,2.2,2.1,0.39,0.73),协方差矩阵i∑ˆ定为d×d的单位矩阵。将其代入微型车的隶属度函数中,如表1所示。

表1 车的隶属度
由车辆所有类的隶属度计算各个类的距离模糊度,比较距离模糊度可以得出该车的具体车型[6]。上面被检测车辆对微型车的距离模糊度计算为:di=(Yi-I)(Yi-I)T=0.182+0.242+0.152+02+0.192+0.262=0.278.
在实验过程中,某被检测车型提取的特征向量x为(391,152,4 213,2.2,2,0.28,0.8),可得其属于微型车。
5 结束语
本文基于AMR传感器车辆检测技术,采用动态基值法抑制基频漂移,采用小波变换法对检测波形进行滤波去噪,然后通过特征提取采用模糊识别算法判断车型。把先进的检测技术和正确的算法相结合,实现了停车检测智能化。实验证明本文提出的算法有效可行,检测准确率明显优于其他方法,该算法在智能化交通中有很好的应用前景。
[1]张星波,钱正洪,白茹,等.基于巨磁阻传感器的无线车位探测器[J].机电工程,2012(12):1477-1479.
[2]吴皓.基于地磁的车辆检测系统与识别算法研究[D].武汉:华中科技大学,2007.
[3]郑东旭.基于地磁的智能停车系统设计与实现[D].杭州:浙江大学,2016.
[4]荣梅,黄辉先,徐建闽.基于地磁传感器的车辆检测算法[J].交通信息与安全,2011(3):43-46.
[5]任保利.地磁车辆检测与车型分类算法研究[D].广州:华南理工大学,2012.
[6]何志强,罗飞,于峰崎,等.基于地磁传感器的车辆检测算法[J].科学技术与工程,2014(8):203-206.
〔编辑:刘晓芳〕
U495
A
10.15913/j.cnki.kjycx.2017.19.058
2095-6835(2017)19-0058-03
株洲市自来水有限责任公司营销客户综合管理平台项目
