基于模糊算法的太阳光导入器的研究
2017-10-09高丽贞厦门工学院福建厦门361005
高丽贞(厦门工学院,福建厦门,361005)
基于模糊算法的太阳光导入器的研究
高丽贞
(厦门工学院,福建厦门,361005)
模糊智能控制作为一种新兴的理论,为解决因太阳强度和角度时刻变化而跟踪不精准的问题提供了一条有效的解决途径,本论文在论述了模糊控制理论的基础上,提出了基于模糊算法的太阳光导入器的研究。给出了系统硬件框图,经过调试,本系统稳定,可以提高控制精度。
太阳能;导入器;模糊算法
0 引言
太阳能作为绿色新能源,是未来能源发展的重点。 考虑到实际天气具有非线性、时变不确定的特点,难以建立精确的数学模型[1],所以应用常规PID控制器通常不能达到理想的控制效果。而模糊控制策略[2]是利用模糊集合论,把人工控制经验转化为计算机能接受的算法语言所描述的算法,它具有不需要了解被控对象的确切模型,控制具有响应速度较快,过渡过程时间较短、精度较高以及鲁棒性较好的优点。
1 追光系统硬件设计
1.1 系统工作原理
由四象限探测器检测太阳光线照射到太阳能电池板上所产生的电流,将电流送给ARM920T控制器中的ADC 进行模数转换,由ARM920T判断太阳的位置;然后送控制量给步进电机驱动器以驱动步进电机控制双轴(竖直和水平轴)机械支架的转动,达到调整太阳能电池板的姿态(即方向角和俯仰角),从而使太阳能电池板与太阳光线垂直,能使太阳光很好的输入到传输介质中(目前利用最多的传输介质就是光纤,利用光在光纤中全反射原理),以便高效率的收集太阳光,通过选择的传输介质传输到需要利用太阳光的地方。使太阳能电池板最大限度地接收太阳能。在控制过程中,加入了模糊算法,采用模糊算法不仅对被控制对象参数变化适应性强,同时使电机运行更加平顺,克服了超调大的问题,保证了控制精度要求及实时性,使系统能在复杂的天气环境下实时追踪太阳,使太阳能电池组件的辐照最大化。
1.2 四象限光电传感器
四象限光电传感器是把4个性能完全相同的光电二极管按照直角坐标要求排列而成的光电探测器件,当入射光斑落在器件感光面的不同位置时,探测器的每个象限输出不同幅度的电信号,通过对这些信号的幅度进行计算,可以确定入射光斑中心在感光面上的位置。这种探测器可以探测光学目标位置的连续变化,具有位置分辨率高、相应速度快等特点。
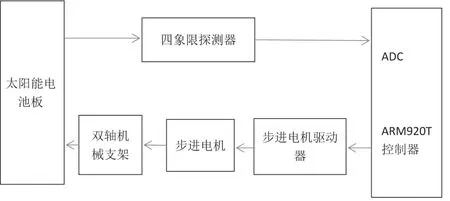
图1 系统硬件组成框图
四象限输出[3]与入射光电位置的关系为:

式中X1、X2、Y1、Y2表示各象限的输出电流(光生电流),Px、Py表示入射光点的位置坐标(坐标原点在光敏面中心),L表示光敏有效区域边长。本系统采用深圳达瑞鑫光电科技有限公司的DRX-QP-SD2信号处理板,其对四象限探测器输出的微小电流信号进行I-V放大及运算处理。其输出上下和差信号,左右和差信号,总和信号,这三路信号直接由ARM920T控制器中的ADC进行采集处理,处理后得到反馈的太阳位置偏差角度,进而驱动步进电机实现对太阳的精确跟踪。
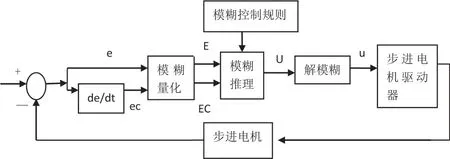
图2 模糊控制器的基本结构
2 追光系统软件设计
2.1 模糊控制原理
由于环境的变化及天气变化的复杂性,太阳光的强度随时在变化[4],因此,系统偏差电压的变化是非线性的,太阳能追光模糊控制器[5]的基本结构如图2所示。本系统采用双输入、单输出的模糊控制结构。通过对4个区域光强信号的实时监测、数据采集,得到实际电压值的数字量,再取四个受光区域中电压值与变化率最大的一组数据,因为这样一组数据相对其他几个区域的精度要高,再将所选区域实际光强电压平均值与设定值进行差分,得到电压变化误差数字量e和ec,送入模糊控制器,通过模糊控制算法得到太阳的实际位置,故可以取实际测量电压偏差e和偏差变化率ec为模糊变量,取电机电枢电压控制量Δu为模糊控制器的输出u。
实际测量四象限光电传感器电压偏差e的基本论域为[-1v,1v],e的模糊论域为 [-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6],则误差e的量化因子为1/6。偏差变化率ec与输出变量u模糊论域为[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]。
根据长时间的调试总结,得到如下控制规则:
if e=NB and ec=PB then u=PB;
if e=NM and ec=PB then u=PS;
共计56条这样的控制规则,具体归纳后见表1。

表1 模糊控制规则表
确定各个语言变量模糊子集的隶属度函数[6],从而得到语言变量e、ec、u的赋值表。
同时根据这些推理规则,可以求出总的模糊关系R,从而根据所取的e=-6,-5,-4…+5,+6和ec=-6,-5,-4…+5,+6中的量化值,经模糊推理合成规则运算,得到语言变量U的模糊集合,然后按照加权平均值法或者隶属度最大值法,求出系统的模糊控制总查询表,见表2。控制时只要通过总控制表中的控制量,乘以相应的系数因子即可以得到模糊控制器的输出。

表2 总控制表
3 总结
本文将模糊算法应用到太阳能追光系统,在光照情况下进行实测整个控制系统的性能,不仅系统稳定,并且提高了跟踪精度,具有良好的应用前景。
[1]李慧,王瑞利.高精度太阳能跟踪控制系统的设计[J].电源技术,2016(02):388-389,407.
[2]韩峻峰,李玉惠等.模糊控制技术.2003,重庆大学出版社.
[3]戴亦宗等.基于模糊控制的太阳能追光系统[J].仪表技术与传感器.2012 No.9.
[4]孙增圻.智能控制理论及技术[M].北京:清华大学出版社,1997.
[5]高蒙蒙等.模糊算法在混凝土快速冻融试验机温度控制中的应用[J].河北农业大学学报.2015.7第38卷第4期.
[6]王波.太阳跟踪及导光系统关键性研究[D].西安电子科技大学. 2013.1.
The research of sunlight importer based on fuzzy algorithm
Gao Lizhen
( Xiamen Institude of Technology , Xiamen Fujian,361005)
The sun intensity and angle always change,so tracking is not accurate,this is a problem. Fuzzy intelligent control as a new theory provides an effective way to solve this problem. This paper proposes the design of the sunlight importer on the basis of fuzzy control theory . The system hardware block diagram is given, and the system is stable after debugging, which can improve the control precision.
sunlight;importer;fuzzy algorithm
福建省中青年科研项目(项目编号:JA1506)。
