一种新型斜爬轨道式擦窗机轮压值仿真优化
2017-09-29曹远洋龙彦泽沈阳建筑大学机械工程学院沈阳068申锡机械有限公司江苏无锡49
曹远洋,张 珂,吴 杰,孙 佳,龙彦泽(.沈阳建筑大学 机械工程学院,沈阳 068; .申锡机械有限公司,江苏 无锡 49)
一种新型斜爬轨道式擦窗机轮压值仿真优化
斜爬轨道式擦窗机是针对连续倾斜屋面设计的一种新型擦窗设备,其行走底盘设计新颖、结构复杂,是整机核心部件.擦窗机工作在倾斜屋面,须保证任何工况下4个轮组同时压向轨道,防止轮压值为负,出现上拔力导致擦窗机出现倾覆,因此,轮压值的设计优化成为了屋面擦窗机的设计重点.针对斜爬擦窗机典型工作状态,对擦窗机底盘进行机构简化并建立力学模型,将模型导入ANSYS Workbench进行有限元分析,结合分析结果进行响应曲面优化.通过轮压值计算和优化分析,给出一种用于斜爬轨道式擦窗机底盘设计的有效方法,满足擦窗机轮压值设计要求,提高整机安全性,为同类产品的设计提供参考.
斜爬轨道; 擦窗机; 轮压值; 有限元; 优化设计
现代建筑不断追求高度、美观、创新,以及越来越多的城市地标本身所具有的代表性、新颖性、超前性,建筑机械所面临的技术难度也不断的增加.大量倾斜式建筑屋面的出现,导致传统水平屋面轨道式擦窗机已无法满足幕墙维护需要.研究和改进擦窗机作业技术,以满足高空复杂屋面建筑物成为了一种需求[1].研究设计新型斜爬轨道式擦窗机的重要性不言而喻,复杂的行走机构更是其重中之重.作者针对湖州东吴斜爬轨道式擦窗机项目展开研究工作,探索斜爬轨道式擦窗机行走底盘的设计、倾斜屋面不同工况下底盘轮压值的设计优化方法及工程应用.
1 东吴擦窗机工程应用背景及设计方案优选
湖州东吴国际广场建筑物标高288 m(含避雷塔),是一对双子楼.其屋面最低面为水平屋面,铺设水平轨道.屋面两侧铺设对称的下斜爬轨道倾角(倾角17°)和上斜爬轨道(倾角23.56°),同时相邻轨道之间水平面投影夹角为45°,屋面整体结构近似为倾斜的棱形,如图1所示.
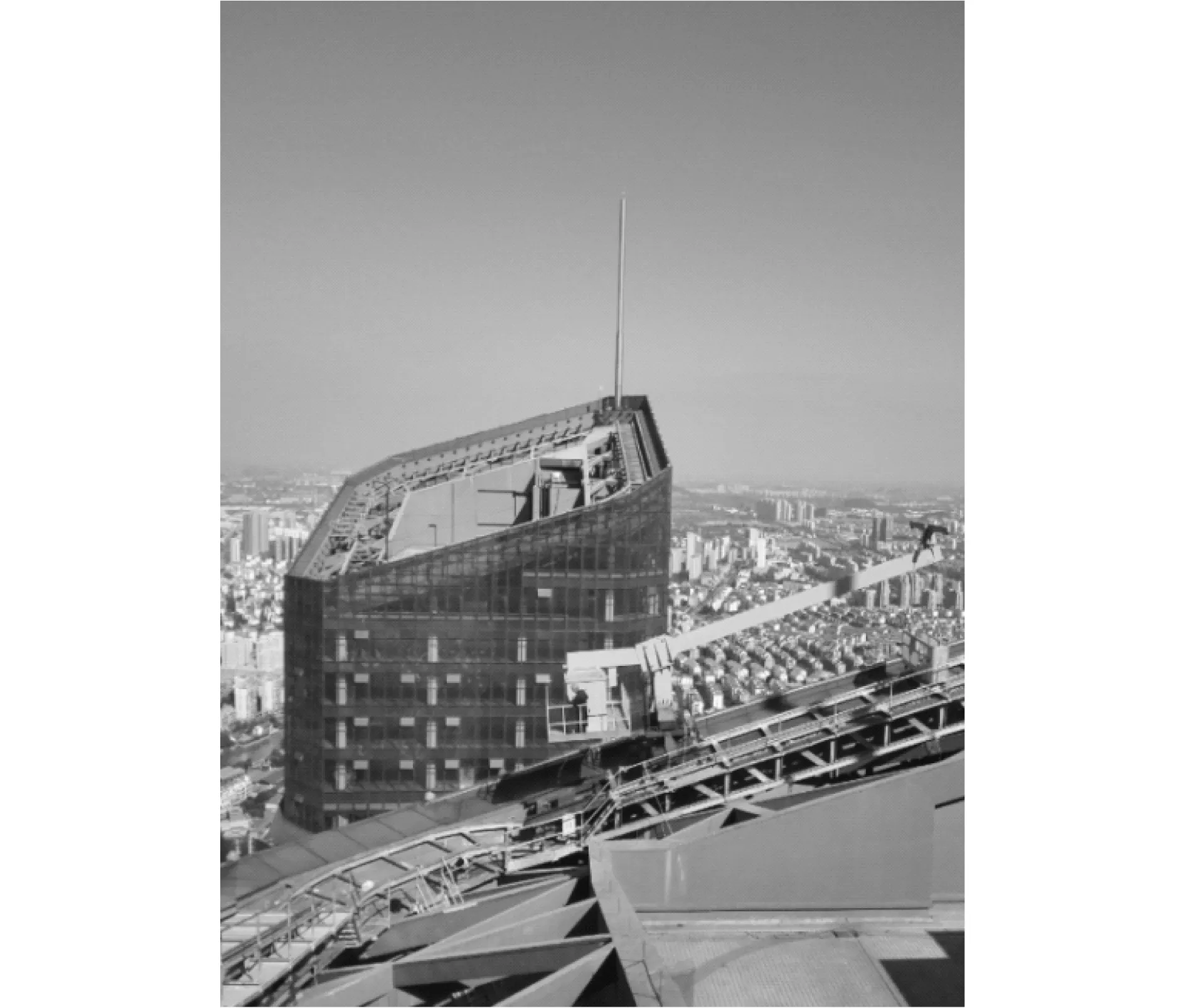
图1 湖州东吴国际广场大楼屋面Fig.1 Huzhou Dongwu InternationalPlaza Building roof
1.1方案1
擦窗机初始方案采用轨道附墙式,轨道铺设在外墙内侧上,擦窗机沿着轨道行走依靠两架臂围绕销轴转动实现水平面到斜爬面过渡.但在现场安装调试过程中,吊臂较长,上车部件较重直接压在回转支撑上,架臂无法转动,导致擦窗机无法过弯.在工作状态下,擦窗机吊船伸出墙外,所产生的倾覆力矩很大.由于屋面结构梁存在,轨距安装空间受限,导致下轨道需提供的抗倾覆力很大,墙体不能承受如此大的拉力[2-3](见图2和图3).
1.2方案2
利用Solidworks建立三维模型,如图4所示.
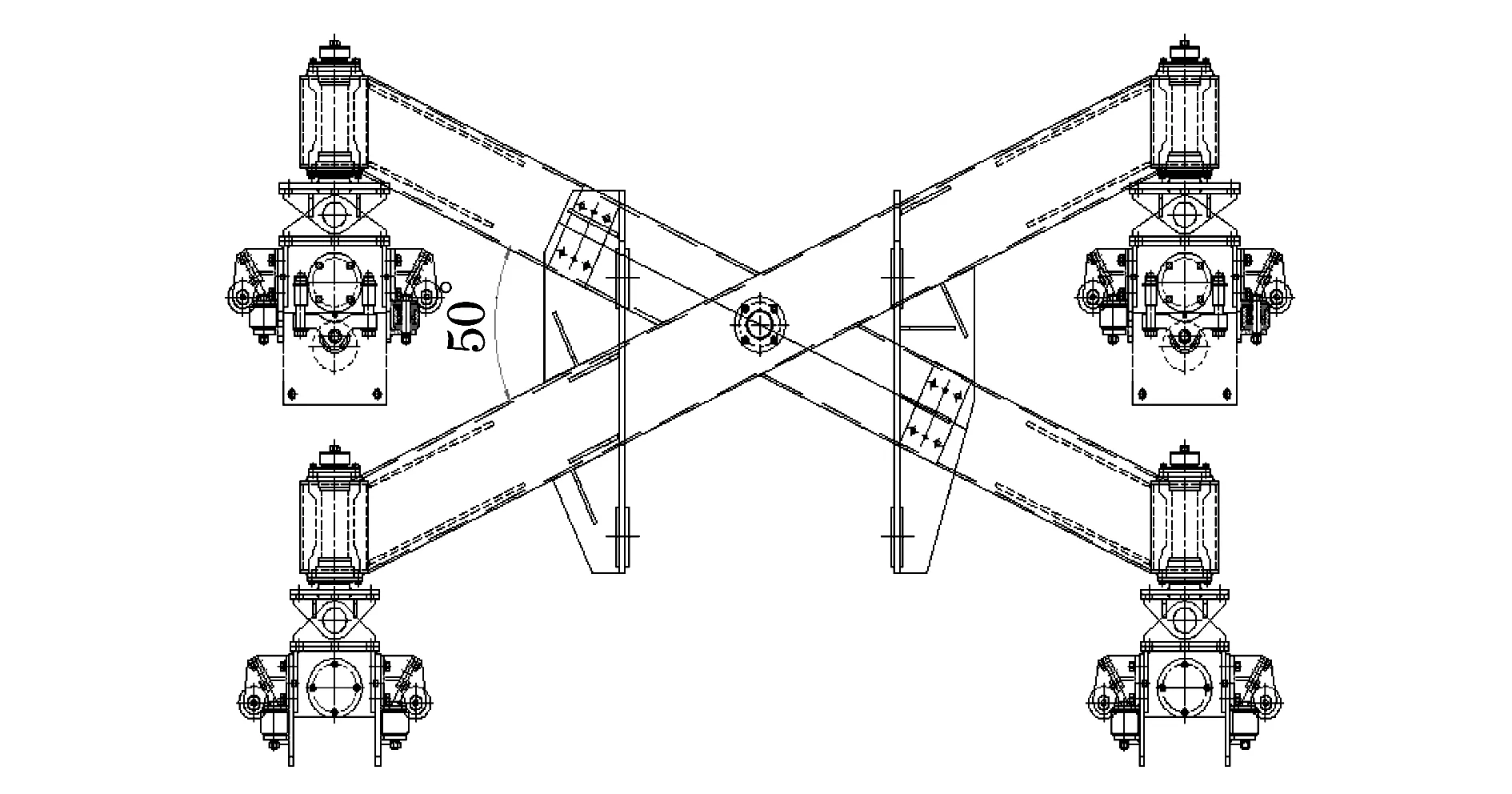
图2 附墙式擦窗机底架示意图Fig.2 Schematic diagram of a wall-mountedwindow-cleaning machine chassis

图3 附墙式擦窗机底盘过弯示意图Fig.3 Wall-mounted window cleaning machinechassis turning diagram
其中:水平底盘与斜爬底盘都采用双底盘设计,分别为水平上下底盘和斜爬上下底盘.上底盘与下底盘之间都采用销轴铰接和液压缸支撑连接,具有电动行走、液压调平等功能.为保证擦窗机在水平轨道与斜爬轨道换轨过程中保持平稳,水平台车底盘液压缸与斜爬底盘液压缸采用联动设计,以保证立柱时刻处于竖直状态[4].

图4 斜爬轨道式擦窗机三维模型Fig.4 3D model of the oblique climbing track typewindow cleaning machine
综合经济性、安全性和现场实验结果,方案1复杂性高、现场施工难度大、安全性低,所以采用设计方案2.
2 CWG250XB型擦窗机工作原理
擦窗机整机行走在水平轨道上,水平上下底盘与斜爬上下底盘都处于水平状态,吊臂旋转伸出墙外,吊船下降,负责对大楼屋面水平底面侧外墙立面进行作业,如图5所示.
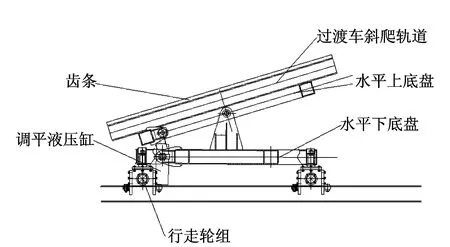
图5 水平小车结构示意图Fig.5 Schematic diagram of horizontal trolley structure
当擦窗机整机沿水平轨道行走至斜爬轨道底部时,水平台车液压杆伸缩,水平上底盘围绕两侧销轴转动,使得水平上底盘上表面焊接轨道与下斜爬轨道上轨道对接.调节斜爬底盘上液压杆伸缩幅度使斜爬上底盘处于水平状态,保证立柱始终处于垂直位置.斜爬擦窗机沿着轨道上齿条到达斜爬轨道,与水平台车分离.斜爬擦窗机即可沿着倾斜轨道行走,完成大楼外立面玻璃的清理和维护[5],如图6和图7所示.

图6 擦窗机工作示意图Fig.6 Working diagram of window cleaning machine

图7 擦窗机换轨示意图Fig.7 Schematic diagram of window cleaningmachine replacement rail
3 斜爬工作状态下擦窗机轮压值设计
3.1轮压值设计依据
擦窗机底盘采用广泛静不定4点支撑,其原因可使擦窗机合力点比静定3点支撑在更大的作用范围内移动,提高整机的稳定性和抗倾覆能力.支撑力的分配与载荷、底盘构造、轨道不平度和刚度、屋面平整度等许多因素有关,同时轨道与屋面的不平度往往很难估计.
当合力点处于底盘外侧,整机将会发生严重倾覆.抗倾覆侧轮组抬高,支撑悬空,轨道受到轮组上拔力,导致行走困难,严重时拉断轨道擦窗机将从屋面上脱落.因此,必须保证合力点在底盘范围内移动,轮组在任何情况都压向轨道[6](见图8).
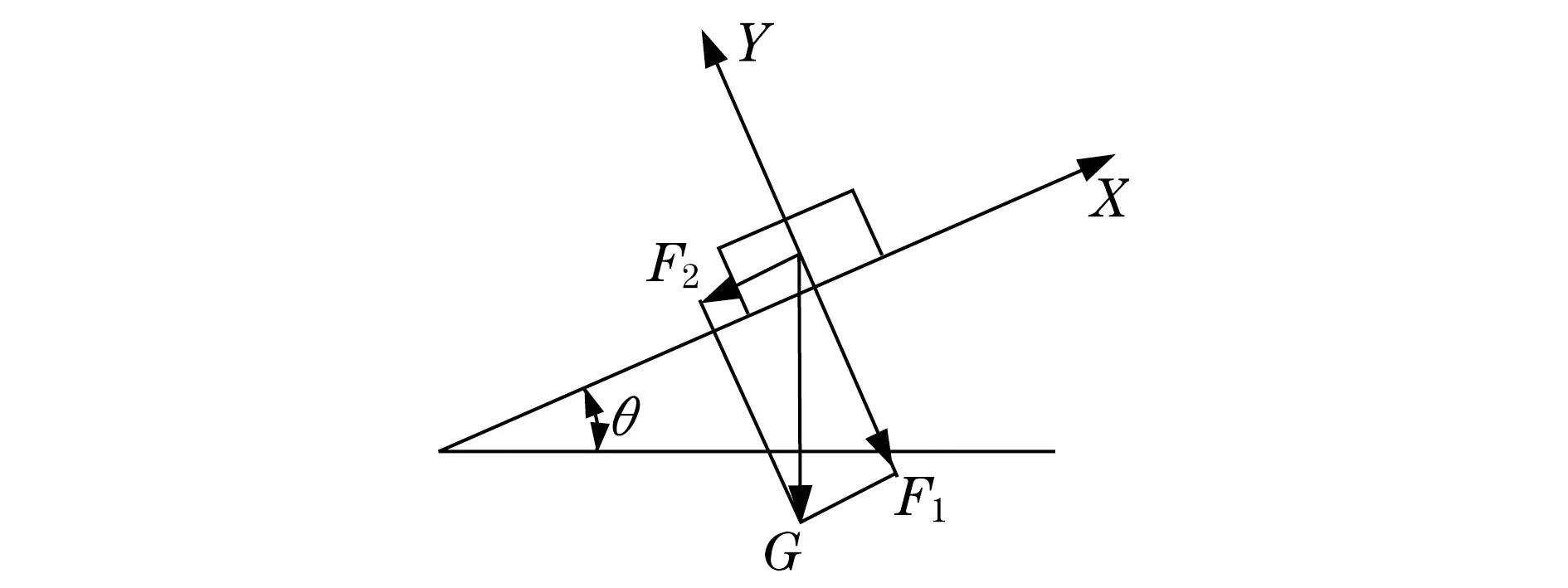
图8 擦窗机底盘受力分析图Fig.8 Force analysis of the chassis ofwindow cleaning machine
擦窗机行走在上斜爬轨道(倾角23.56°),立柱在上斜爬底盘油缸的作用下处于竖直状态,计算底盘的轮压值,校验不利的情况(底盘一端翘起)究竟是否会出现(见图9和图10).
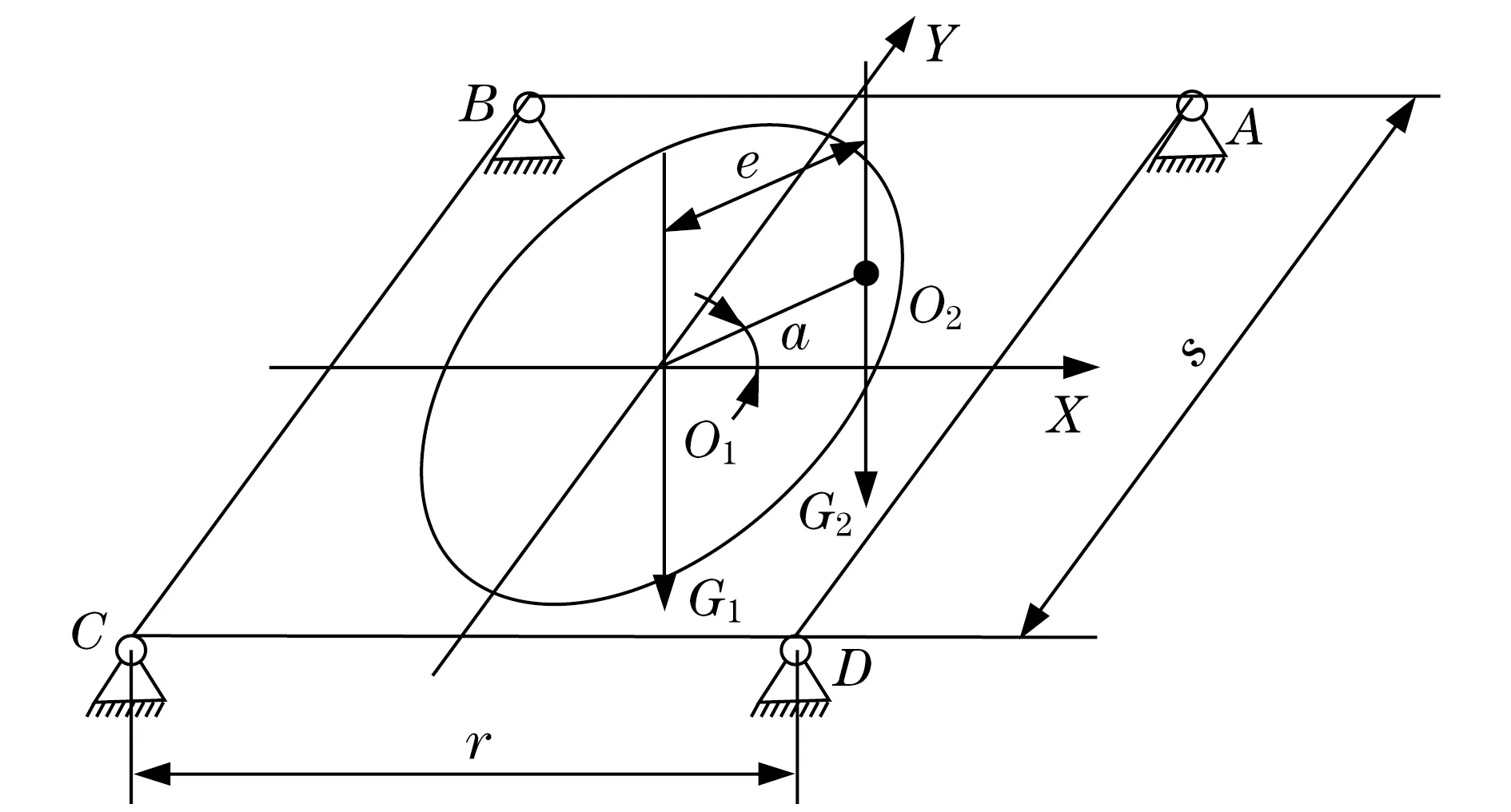
图9 擦窗机轮压值计算示意图1Fig.9 Schematic diagram 1 of wheel pressure calculationof window cleaning machine
分别沿轨道方向和垂直轨道方向建立X,Y轴直角坐标系.斜爬面擦窗机轮组总支撑力为
F1=Gcosα
(1)
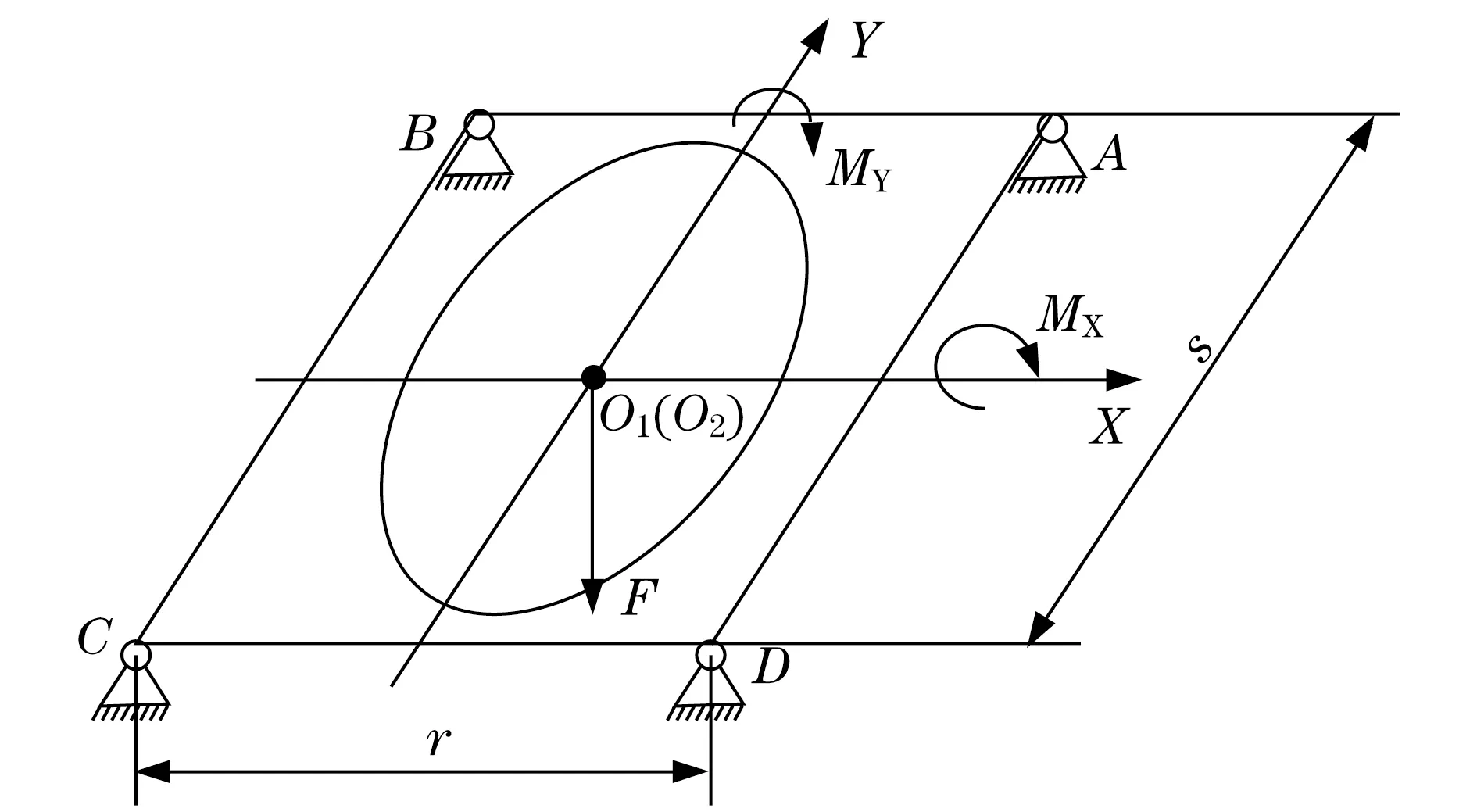
图10 擦窗机轮压值计算示意图2Fig.10 Schematic diagram of wheel pressurecalculation 2 of window cleaning machine
根据力系平衡定理,将上底盘部件回转中心从O2点平移至O1点,将分别产生对X,Y轴的力矩Mx和My.其支撑反力大小计算分别为
Mx=G2ecosα
My=G2esinα
(2)
(3)
式中:Mx,My为力系向回转中心简化产生的力偶;e为上车部件合力点到回转中心的距离;r为轨距;s为轮距;下底盘质量G1;上车部件质量G2.

(4)
3.2上车部件合力点至回转中心距离e
上车部件合力点围绕回转中心旋转,为了计算e,已知轨距s与轮距r相等,都为2 000 mm.擦窗机行走在斜爬轨道分为2种情况:① 工作状态吊船在上,机房在下;② 工作状态吊船在下,机房在上.校验第1种工作状态:设上车部件合力作用点距离回转中心水平距离为X.上底盘倾覆侧等于抗倾覆侧,解得X=570.51 mm,求得偏心距e=X/cos 23.56°=622.38 mm(见图11).表1所示为擦窗机载荷分布图.
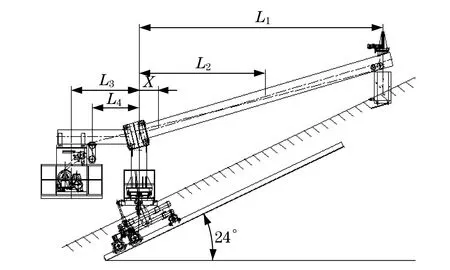
图11 擦窗机正常工作状态示意图Fig.11 The normal working condition ofwindow cleaning machine

表1 擦窗机载荷分布图Tab.1 The load distribution diagram ofwindow cleaning machine
擦窗机底盘轮距轨距都为2 000 mm.由上述最大轮压角tana0=s/r可知,把e代入轮压值公式计算(方向垂直于轨道)得
Fmax=32 754 N
Fmin=7 120 N
FB=19 937 N
FD=19 937 N
(5)
吊臂前端受最大轮压力为32 754 N,最小轮压值B点为7 120 N,即在正常工作状态情况下,4个轮组同时压向轨道,不存在底盘一端翘起的状况.
3.3危险状况下轮压值计算
在擦窗机使用过程中,出现部件老化、液压缸漏油,或工人操作不当等情况使得立柱不在处于竖直状态,而处于最危险工况,即立柱垂直斜爬轨道时,校验此刻轮压值.
当吊臂旋转至整机最低处,即在工作状态第2种情况下(见图12),此时吊臂与水平面夹角约为23.56°-17°≈6°,擦窗机底盘受力最差.设上部件合力点位于立柱与吊船之间,偏心距为X.
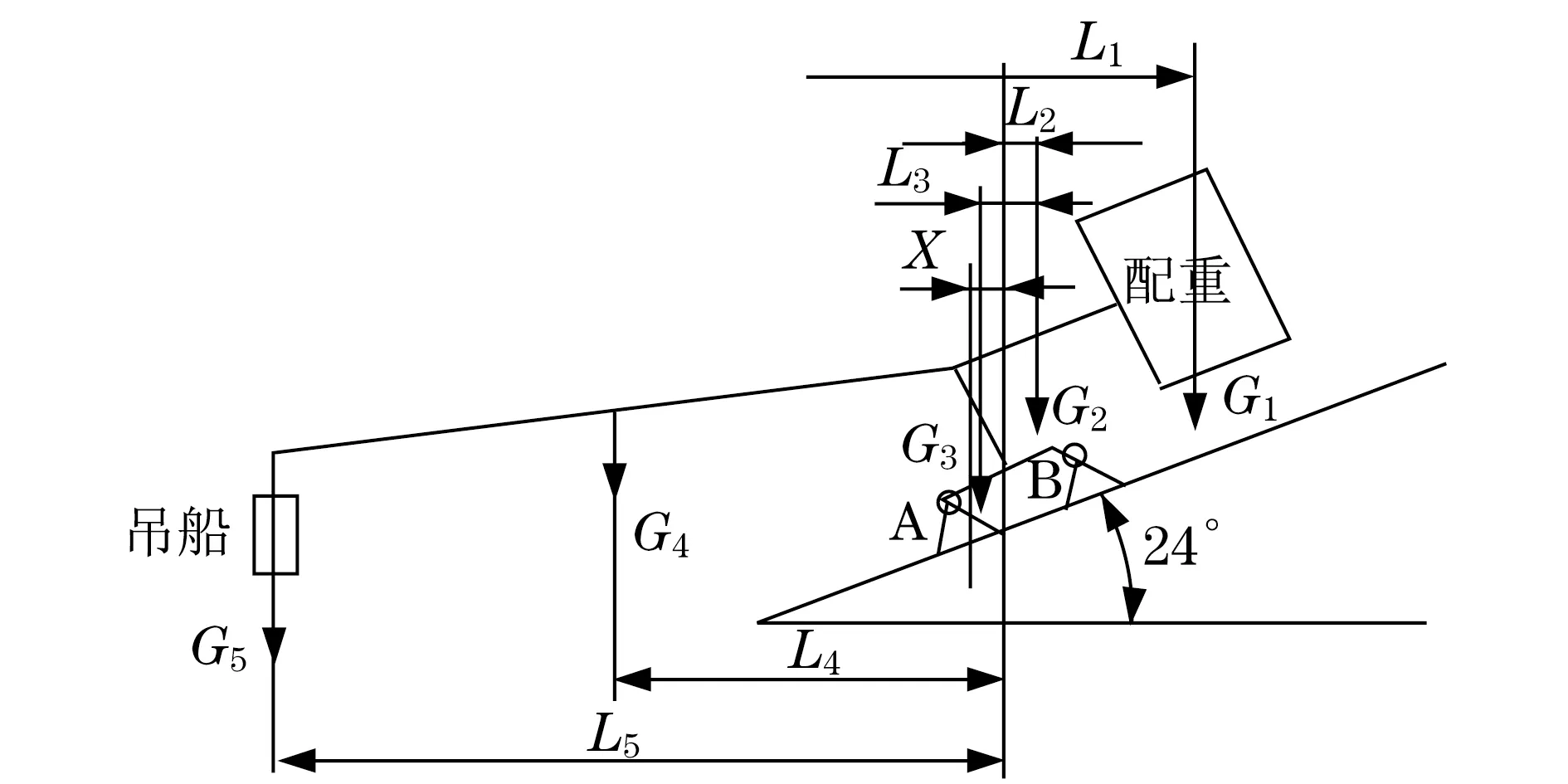
图12 擦窗机危险工作状态示意图Fig.12 Schematic diagram of the dangerous workingcondition of the window cleaning machine
代入数值计算X=1 455 mm,偏心距e=X/cos 23.56°=1 587 mm,合力作用在底盘范围外.将e代入最大最小轮压值(方向垂直于轨道)公式得
Fmax=50 013.3 N
Fmin=-10 139.4 N
图12中,A点受最大轮压力为50 013.3 N,B点一端最小轮压值为负,即距离吊船最远端底盘将出现翘起,整机将会在倾斜轨道沿吊臂前端倾覆,轮组受轨道上拔力10 139.4 N.
4 擦窗机底盘的优化设计
4.1擦窗机危险状况下底盘的仿真分析
在CAE领域,ANSYS Workbench是性能卓越的多物理场耦合分析软件,模型的好坏直接影响仿真结果的准确性.为了保证仿真精度和准确性,利用Solidwork建立底盘模型,并对不必要的几何特征进行简化,导入ANSYS Workbench进行仿真.将上车部件对底盘的影响简化为远程力和集中力,添加材料和边界条件,对变形、等效应力进行求解[9],得到总形变.等效应力如图13和图14所示.
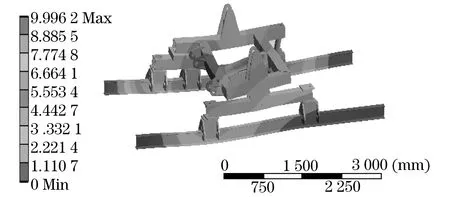
图13 危险状态下底盘的变形云图Fig.13 The deformation of the chassis underdangerous condition
可以看到斜爬底盘最大变形发生在内轨道侧耳板与液压缸固定处,最大变形为9.996 2 mm,最大应力发生在底架结构中间连接梁上为847.36 MPa.
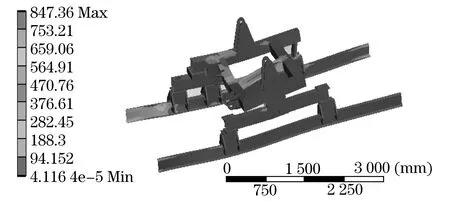
图14 危险状态下底盘的应力云图Fig.14 The stress of the chassis underdangerous conditions
4.2轮压值优化
选取最小轮压值
(6)
为目标函数.满足条件
Fmin≥0
(7)
考虑屋面空间结构和过弯半径限制和经济效益,维持轨距与轮距保持不变.选取G1,G2,e为优化变量,将不等式(7)两侧化简得

(8)
此时解得e=1.12 m,可知通过增加下底盘质量G1、减少上车部件质量G2、减小2个回转中心的距离e来实现优化.
根据变形和应力云图,在斜爬底盘内轨侧上下底盘两端假设支撑,底盘中间结构增设为2根,下底盘增质量90 kg.同时,减少配重箱配重块100 kg,使配重臂延长600 mm.将调整后的结构带入平衡公式,计算解得e=0.186 m,满足式(8),实现优化目的.新的底盘结构如图15所示.
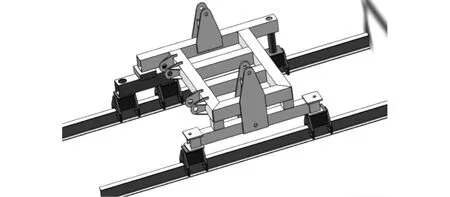
图15 优化后底盘三维模型示意图Fig.15 Schematic diagram of the optimized3D model of the chassis
4.3支撑管响应曲面优化分析
在保证结构刚度和强度的情况下,为使结构重量最轻最合理,利用ANSYS DesignXplorer模块进行响应曲面优化.将支撑管厚度以及所受外载荷设定为输入参数,设定合理参数变化范围,设置最大应力及最大总应变为输出参数.由于支撑位置的改变与支撑管所受压强相关联,设定支撑管厚度参数为8~11 mm,计算得压强支撑管所受外载荷变化范围为55~98 MPa,得到输入、输出变量列表框,如图16所示.

图16 输入输出参数变量列表Fig.16 The list of input and output parameter variables
通过计算机在DOE表中列出关于板厚、质量、变形和应力关系的9个设计点,如图17所示.
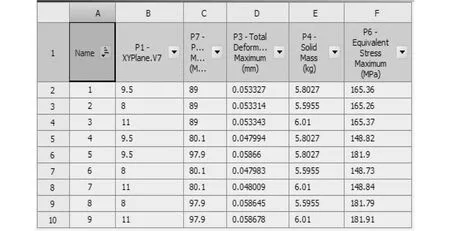
图17 响应数据Fig.17 Response data
通过计算机绘制设计点的等效应力曲线,可以更加直观地对9组数据进行对比(见图18).
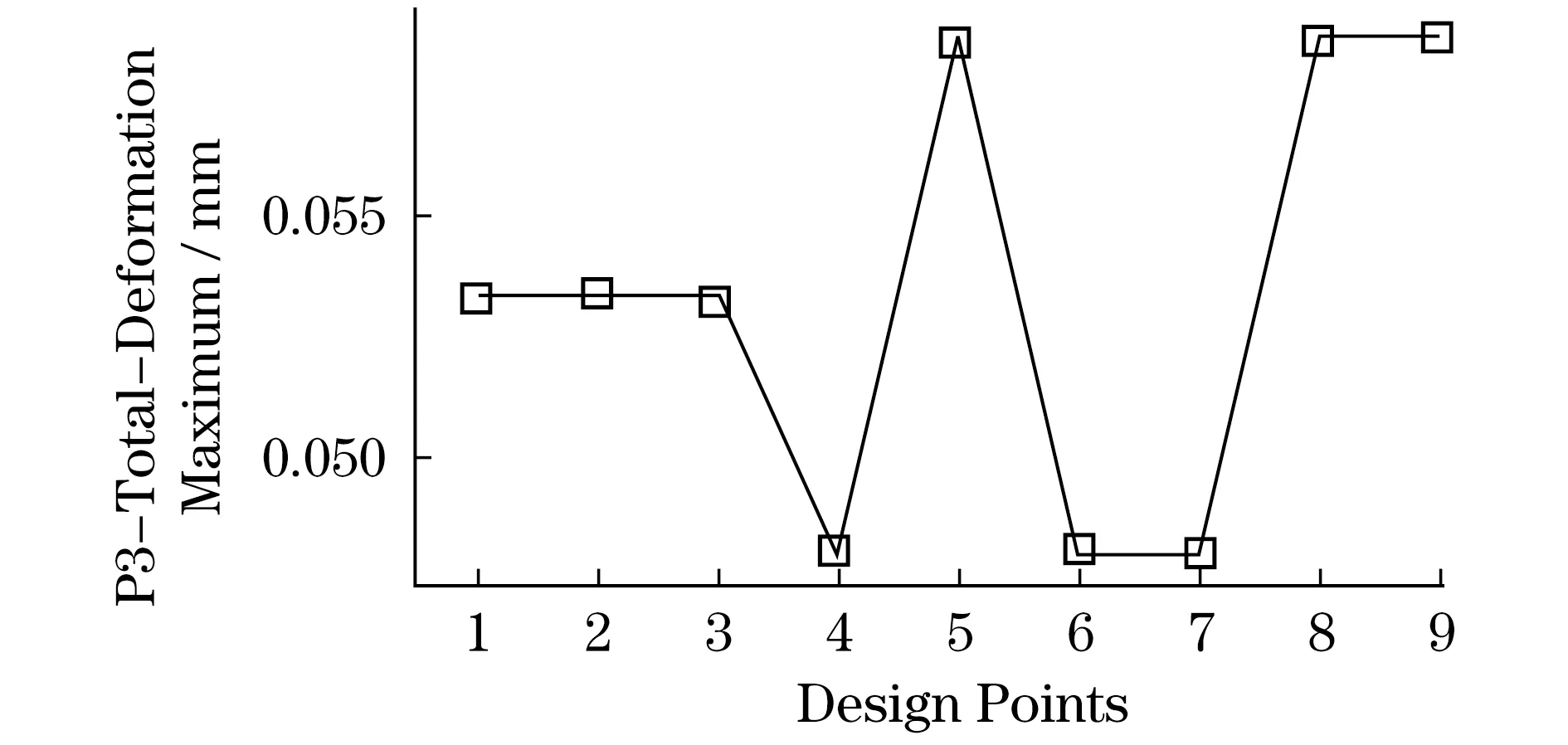
图18 响应曲线Fig.18 Response curve
由图18观察曲线可得设计点6点所产生的总形变较小,在最大载荷的作用下采用8 mm的板厚与板厚为11 mm相比,表现出来的等效应力水平相差不是很大.为了更加直观地显示9组数据之间的关系,利用Response Surface模块建立板厚、变形、等效应力之间的响应曲面,如图19所示.
选取Response Chart曲面上应力、变形、板厚最小的点作为正式设计点,更新设计后重新进行计算(见图20).
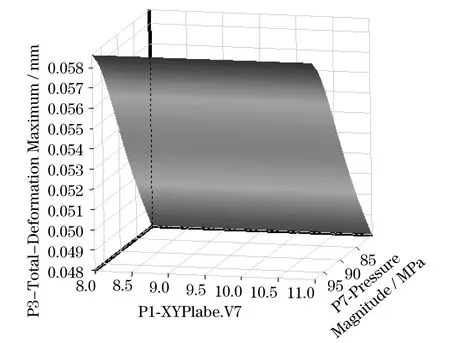
图19 响应曲面Fig.19 Response surface
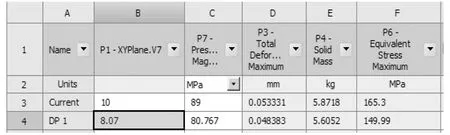
图20 设计点参数变量Fig.20 Design point parameter variables
由图20可见,经过优化设计后,8 mm的板厚已经能解决问题.重新对底盘进行仿真,如图21和图22所示.
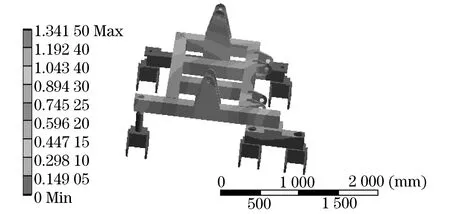
图21 底盘优化后的变形云图Fig.21 Deformation of the chassis after optimization
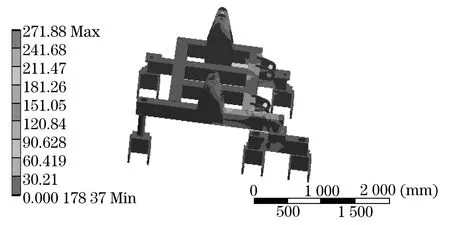
图22 底盘优化后的应力云图Fig.22 The stress of the optimized chassis
由图21和图22所示斜爬底盘最大变形为1.34 mm,等效应力为271.88 MPa.经过优化之后,擦窗机底盘变形和等效应力明显减少,整个底盘的刚度和稳定性得到明显的提升,达到了优化的目的[10].
5 结语
擦窗机作为高空作业载人设备,安全性不言而喻,轮压值的设计优化是轨道式擦窗机设计的重点.本文针对大倾角变换倾斜屋面,提出了一种借助水平台车换轨的方案,解决了擦窗机在两不平行屋面行走问题.并给出了斜爬擦窗机倾斜屋面轮压值计算方法,借助有限元软件对危险工况下斜爬底盘仿真.根据仿真结果,提出了结构进行改进和优化方案,提高了整机安全性,对斜爬轨道式擦窗机的设计和改进提供了参考.
[1] 中华人民共和国国家质量检验检疫总局.擦窗机:GB 19154—2003[S].北京:中国标准出版社,2003.
General Administration of Quality Inspection and Quarantine of the People’s Republic of China.Permanently installed suspended access equipment:GB 19154—2003[S].Beijing:China Standard Press,2003.
[2] 陈春峰.爬升式擦窗机设计中应重视的问题[J].住宅科技,2000(12):34-36.
CHEN C F.Problems to be paid attention to in the design of climbing window cleaning machine[J].Residential Science and Technology,2000(12):34-36.
[3] 薛抱新,祝志锋.高层建筑擦窗机的选型与建筑设计要求[J].建筑科学,2004(1):65-71.
XUE B X,ZHU Z F.Type selection and architectural design of high rise building window cleaning machine[J].Building Science,2004(1):65-71.
[4] 吴安,李玉杰,谢丹蕾,等.北京国贸三期大厦擦窗机轨道系统的设计研究[J].建筑机械化,2013(5):60-61,99.
WU A,LI Y J,XIE D L,et al.The design and research of the track system of window cleaning machine for the three phase building in China World Trade Center,Beijing[J].Building Mechanization,2013(5):60-61,99.
[5] 张荣庚.轨道式擦窗机抗倾覆稳定性校核[J].建筑机械化,2013(9):62-64.
ZHANG R G.Check the anti overturning stability of the rail type window cleaning machine[J].Construction Mechanization,2013(9):62-64.
[6] 中华人民共和国国家质量检验检疫总局.起重机设计规范:GB/T 3811—2008[S].北京:中国标准出版社,2008.
General Administration of Quality Inspection and Quarantine of the People’s Republic of China.Design rules for cranes:GB/T 3811—2008[S].Beijing:China Standard Press,2008.
[7] 吴安,曹恩钦.高层建筑擦窗机轨道基础的设计计算[J].建筑机械,2007(9):60-61,63.
WU A,CAO E Q.Design and calculation of the track foundation of window cleaning machine for high rise building[J].Construction Machinery,2007(9):60-61,63.
[8] 程文明,李亚民,张则强.桥式起重机与门式起重机轻量化设计的关键要素[J].中国工程机械学报,2012(1):41-49.
CHENG W M,LI Y M,ZHANG Z Q.Key elements of lightweight design for overhead crane and gantry crane[J].Chinese Journal of Construction Machinery,2012(1):41-49.
[9] 乔为禹.大型履带起重机臂架防后倾系统仿真[D].大连:大连理工大学,2008.
QIAO W Y.Simulation of the anti tipping system of large scale crawler crane[D].Dalian:Dalian University of Technology,2008.
[10] 吴玉厚,黄凯,张珂,等.基于有限元分析擦窗机吊臂系统的优化设计[J].机械设计,2016(3):62-66.
WU Y H,HUANG K,ZHANG K,et al.Optimization design of lifting arm system in the window-cleaning equipment based on finite element analysis[J].Mechanical Design,2016(3):62-66.
Thesimulationandoptimizationofwheelpressureaboutanewbuildingmaintenanceunit
CAOYuanyang,ZHANGKe,WUJie,SUNJia,LONGYanze
(1.School of Mechanical Engineering,Shenyang Jianzhu University,Shenyang 110168, China; 2.Shenxi Machinery Co.,Ltd.,Wuxi 214192,Jiangsu, China)
The oblique climbing track machine is a new type of building maintenance unit which is designed for continuous sloping roof.The design of running chassis which is the core part of the whole machine is fresh and complex.In any case,in order to avoid the wheel pressure value is negative,the window cleaning machine need to press its four wheel group into the rail on the sloping roof,or the equipment will topple over.So the design optimization of wheel pressure has become the focus of the design of the window cleaning machine.For the typical working state of the oblique climbing window clean machine,the mechanism is simplified and the mechanical model is established.The model is imported into ANSYS Workbench for finite element analysis,and the response surface is optimized by the analysis result.Based on the calculation of wheel pressure value and strength analysis,an effective method for the design of a building maintenance unit’s chassis is presented,which is a reference for the design of the similar products.
oblique climbing track; building maintenance unit; wheel pressure; finite element; optimization design
TU 976+.42
: A
: 1672-5581(2017)03-0248-07
国家十二五科技支撑计划资助项目(2011BAJ02B07);住房和城乡建设部科学技术计划资助项目(2015-K3-009);沈阳建筑大学国家(地方)联合工程实验室开放基金资助项目(SJSC-2015-17)
曹远洋(1990—),男,硕士生.E-mail:caoyuanyang163@sina.com
