仿生四足机器人运动学与动力学仿真分析*
2017-09-28宫赤坤张吉祥袁立鹏
宫赤坤, 张吉祥, 袁立鹏
(1.上海理工大学 机械工程学院,上海 200093;2.常州恐龙园股份有限公司,江苏 常州 213022;3.哈尔滨工业大学 机电工程学院,哈尔滨 150001)
仿生四足机器人运动学与动力学仿真分析*
宫赤坤1, 张吉祥1, 袁立鹏2,3
(1.上海理工大学 机械工程学院,上海 200093;2.常州恐龙园股份有限公司,江苏 常州 213022;3.哈尔滨工业大学 机电工程学院,哈尔滨 150001)
为了提高四足机器人的设计效率和设计的可靠性,缩短四足机器人研发周期,文章采用虚拟仿真技术对四足机器人进行仿真研究。文章对虚拟样机进行机构运动学与动力学分析,建立仿生四足机器人的运动学方程及拉格朗日动力学方程,利用三维建模软件pro/E建立实体模型导入到ADAMS中进行系统仿真,采用对角小跑步态,通过仿真结果验证了运动学和动力学数学建模的正确性,分析了影响机器人动态稳定性因素,为物理样机的设计提供了理论依据。
仿生四足机器人;运动学;动力学;仿真分析
0 引言
四足机器人一直是机器人领域研究的热点[1],由于四足机器人具有很强的环境适应能力,在一些军事运输,抢灾救援,探测侦查等方面具有很大的应用前景[2]。现阶段,比较具有代表性的四足机器人有美国波士顿动力公司的BigDog ,韩国工业技术研究院和Rotem公司研制的液压驱动四足机器人等。由于四足机器人的结构比较复杂,用传统的机械系统实物实验研究的方法设计和研究机器人时,设计周期长,成本高。本文利用Pro/E软件建立四足机器人的三维模型,通过ADAMS动力学软件对该三维模型进行运动学和动力学仿真,在仿真过程中对一些数据进行采集分析,找出影响机器人动态稳定性的因素,对影响因素进行及时改正,为机器人的物理样机的研制提供了可靠的依据,并缩短了机器人的研发周期,降低了研发成本。
1 机械结构设计
本文总的研究思路如图1所示。本文特色是充分利用仿真概念,仿真不仅体现在对虚拟样机的仿真上,还利用Matlab软件根据理论计算,将两种结果进行对比验证,以改进设计方案,直到达到要求为止,最后再进行加工。本文通过用Matlab数学软件根据理论进行计算,利用ADAMS刚体动力学软件进行刚体分析,在该机器人的各项参数满足要求后,再根据二维图纸进行加工制造。该四足机器人的物理样机根据这一思想进行设计,取得了很好的实际效果。

图1 系统研究思路图
四足机器人的结构设计要满足一定的性能要求,如要能够实现前进转弯,具有一定的承载能力,机械结构的设计易于加工等。根据要求设计的四足机器人如图2所示。该机器人四条机械腿呈均匀分布状态,每条机械腿均由侧摆关节、大腿关节和小腿关节组成,其中各关节之间依次通过转动关节连接。图中1号电机为驱动腿部关节在水平面内进行旋转运动;2号电机和3号电机为驱动腿部关节在垂直平面上做旋转运动。脚掌材料采用橡胶材料,以增加机器人运动时与地面的摩擦力,为机器人前行提供足够的动力。
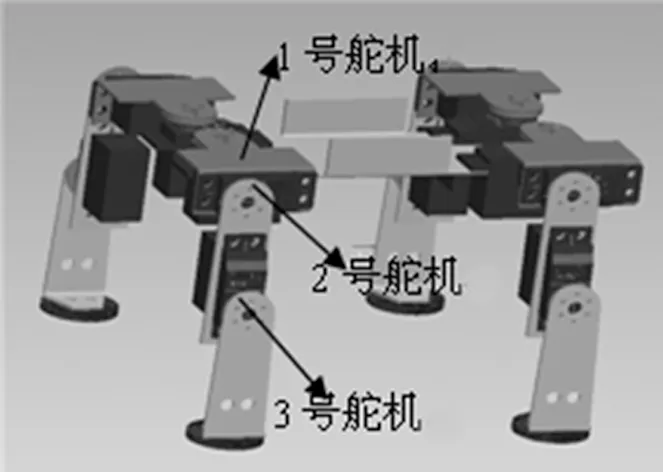
图2 四足机器人机构图
2 仿生四足机器人运动学

px=c1c23l3+c1c2l2-l1s1+a
py=s1c23l3+s1c2l2+l1c1+b
pz=-s23l3-s2l2+c
其中,sij=sin(θi+θj),cij=cos(θi+θj)。
运动学的逆解是机器人运动规划和轨迹控制的基础。根据不同的末端轨迹要求,通过逆解可以求出各个关节在不同时刻应该转动的角度。依据已知的脚掌位姿相对于机体的位姿坐标,再利用已知的各杆件长度,就可以分别求出各个关节的转动角度,具体如下:


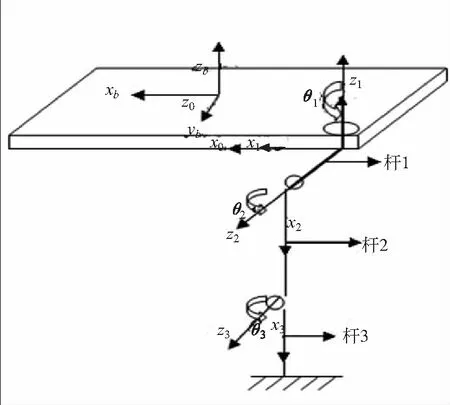
图3 四足机器人腿部D-H坐标系
3 仿生四足机器人动力学
仿生四足机器人的动态性能由动力学方程来描述,本文应用拉格朗日方程来求解四足机器人动力学问题。如图3 所示,杆1(髋关节)杆2(大腿)杆3(小腿)的质量分别是m1、m2、m3以各杆末端的点质量来表示,髋关节的运动在xoy平面内,而其余在xoz平面内,θ1θ2θ3分别是各个关节的转角,g为基坐标系内重力加速度矢量。
系统的拉格朗日方程为:



由上面的式子可以得到各个关节力矩:
其中:

通过用mathematic软件求解,求出驱动关节2 的力矩为10Nmm,驱动关节3 的力矩为29Nmm,T3 驱动的关节是与地面接触的,其中脚掌和地面具有很大的摩擦力,因限于本文机器人的结构,小腿在抬起的过程中与地面有短时间的摩擦过程,这就需要较大的力矩来驱动,T2 的作用就是抵消大小腿的重量,把大小腿抬起来,完成向前迈步的动作,其大小可看作是大小腿重量再乘以很小的舵机旋转半径,故T2的扭矩值没有T3大,这一理论计算结果也被后面的仿真结果所证实。
4 仿生四足机器人仿真分析
整个机器人系统包括主体和四条腿,每条腿均有2个零件并通过2个关节相连,这样共有9个零件组成,因为材料都是硬质材料,可在在仿真时把零件设置为刚体,转动关节部分可添加旋转副,无相对运动的关节可以看做一体,这样做的话既可以省时间,又可以使仿真速度加快。仿真如图4所示。从图中可以看出,机器人可以很柔顺的向前行走,符合实际动物行走时的步态运动规律。

图4 机器人仿真截图
4.1 运动学仿真结果及分析
仿真分析后由ADAMS/postprocessor可以知道机器人重心在x、y、z三个方向上的位移。其中x、y、z方向分别表示前后方向,左右方向,上下方向。因为该机器人采用的是对角小跑步态,所以左前腿和右后腿,右前腿和左后腿的驱动图线一样,差异在于该驱动曲线相对的延迟了半个周期。
图5表示该机械人的质心在x、y、z方向上的运动曲线,图5a为躯体的在前进方向x的运动图像,由图像中运动曲线可知,在前进方向上初始值为301.37mm,终点值为-165.33mm,总位移为466.7mm,时间为5s,由此计算平均速度为93.34mm/s,该值符合设计速度要求。图5b为机器人质心左右偏摆y方向的运动图像,由图分析可得其最大值为14.11mm,最小值为-4.39mm,该曲线的偏离曲线呈往复循环趋势,在5s时间内,初始值和终点位置相差距离为2.5mm,该结果和实际需求相近,符合要求。图5c为机器人质心在z轴方向上下俯仰的运动图像,从图中看出,Z方向上上下俯仰的的最大值为-120.10mm,最小值为-122.44mm,因此该质心在Z方向上的波动幅度为2.34mm;该四足机器人总体身高为140mm,则其质心在Z方向的波动率为2.34/140=1.67%,该值表明机器人运动平稳。图5b中曲线呈现类似于正弦曲线的趋势,四足机器人爬行时按照类似姿势行走,这符合自然界中四足动物行走的一般形式。
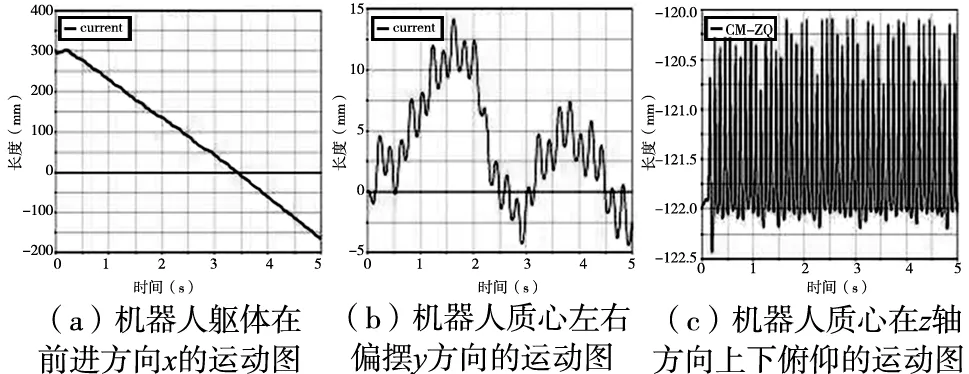
图5 质心在x y z上运动曲线
图6所示的是质心分别在xyz方面上的运动速度图线。其中图6a表示质心在x方向上的前进速度曲线,图6b表示质心在y摇摆方向上的速度曲线,图6c表示质心在z起伏方向上的速度曲线。从图中可以看出机器人行走不是理想的直线状态,而是时而向左时而向右的偏离状态,分析可得这是由于机器人自身的步态、抬腿的顺序及和地面的碰撞力的大小来引起的。

图6 质心分别在x y z上运动速度曲线
4.2 动力学仿真结果及分析
动力学仿真分析的主要目的就是验证关节力矩和运动副上所受的力是否符合设计的要求。在仿真过程中,可对左前腿的髋关节和膝关节与左后腿的髋关节和膝关节分别进行测量。在这里,因为采取的是连续性对角小跑步态,故而只取一侧的腿进行分析。
图7中横坐标轴表示为时间,纵坐标轴表示为各关节轴上所受到的力或者是力矩值。图中的正弦曲线表示的是各转轴的转动角度。图7a曲线为左后腿髋关节的关节转角值和所受力矩。左后腿膝关节的关节转角值和所受力矩如图7b所示。在机器人模型一定的情况下,通过仿真得出了在不同的角速度之下各关节力矩的变化,由图中可以看出以下结果,无论是髋关节还是膝关节,在支撑时所受力矩总是大于摆动时所受力矩。图7a和图7b中的突变出现在脚掌与地面的接触时刻,此时θ3=13.28ο,θ1=0,雅克比矩阵为奇异矩阵,解出的解非常大,故而发生很大的突变,即图中的近似直线。除去突变的位置以外,其余地方的力矩大部分都集中在300Nmm之内,与实际选用的FutabaS3003型伺服马达在6V的电压下扭矩为300Nmm相符。
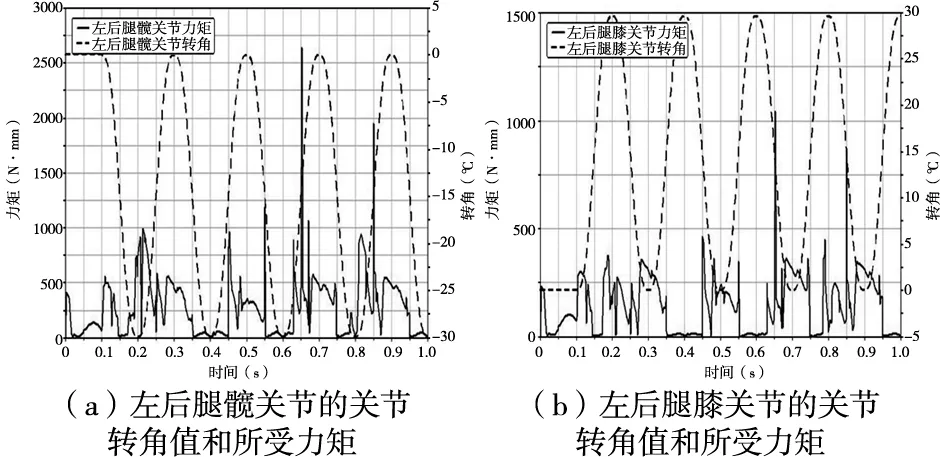
图7 腿部髋关节和膝关节转角与力矩
图8a为右前腿髋关节重力方向受力图,图8b为左后腿髋关节重力方向受力图;从中可以看出图8a、图8b受力情况类似,仿真时右前和左后腿同时向前迈步,同时离开地面,在某一时刻又同时和地面碰撞,才有了在运动学上的零点,出现了极值点。其中两图中的最大值在85N之内,且大部分分布在50N之内,即可认为机器人右前腿和左后腿受力曲线波动较小。此外,对机器人左前腿和右前腿的髋关节重力方向受力进行仿真分析,得出同样结果。分析得出机器人行走的稳定性较好。

图8 腿部关节重力方向受力曲线

图9 脚掌分别在x y z 方向上的运动轨迹曲线
本文还对机器人脚掌的运动进行仿真,通过脚掌的运动轨迹来进一步分析该虚拟样机设计的合理性。图9为左前脚掌分别在x、y、z方向上的运动轨迹曲线,从图中可以看出机器人在行走过程中脚部会有轻微的不稳定现象,分析这是由于四足机器人脚的形状对足底受力的影响,此外发现选择椭圆形足底可以减小受力,优化足部受力情况,所以在四足机器人足底粘贴了椭圆形橡胶。
综上所述,正是建立在对虚拟样机进行完整充分的仿真分析基础上,才设计出了与虚拟样机一模一样,且性能达到要求的物理样机,如图10所示,该图为四足机器人对角步态行走实际效果图,符合预期。

图10 四足机器人对角步态行走实际效果图
5 结论
该实验表明,在ADAMS环境下对四足机器人进行虚拟样机的建立和仿真分析,不仅能够验证该机器人设计的可靠性,而且能够分析出该机器人行走稳定性的影响因素,对其消除后可进一步提高机器人行走的精度和效率;该过程也大大的缩短了机器人的研发周期,为物理样机的成功研制提供保障。
[1] 雷静桃,高峰,丁靖.基于虚拟样机技术的四足步行机的动力学建模与仿真[J].系统仿真学报, 2007,19(8): 1733-1735.
[2] 张秀丽.四足机器人节律运动及环境适应性的生物控制研究[D].北京:清华大学, 2004.
[3] 蔡自兴.机器人学[M].北京:清华大学出版社, 2000.
[4] 陈佳品, 程君实, 席裕庚.四足机器人对角小跑直线步行的虚拟模型[J].上海交通大学学报,2001,35(12):1771-1775.
[5] 牛元会,程光明,杨志刚. D-H坐标系下机械手正向运动学分析[J].机械工程师,2006(7): 27-29.
[6] 盛明伟.四足机器人静态步行建模与仿真研究[J].哈尔滨:哈尔滨工业大学,2007.
[7] 徐小云,颜国正.六足仿生机器人及其三角步态的研究[J].光学精密工程,2002,10(4):392-396.
[8] 段清娟,张锦荣,王润孝.基于虚拟样机技术的四足机器人结构设计[J].机械科学与技术,2008,27(9):1171-1174.
[9] 孙杏出,张之伟.四足步行机运动机构及步态参数对行走稳定性影响分析[J].北京航空航天大学学报,1993(3):18-25.
[10] 杜中华,王兴贵,狄长春.用PEO/E和ADAMS联合建立复杂机械系统的仿真模型[J].机械,2002,29(S1):153-154.
(编辑李秀敏)
DynamicAnalysesandSimulationoftheBionicQuadrupedRobotics
GONG Chi-kun1, ZHANG Ji-xiang1,YUAN Li-peng2,3
(1.School of Mechanical Engineering,University of Shanghai for Science and Technology, Shanghai 200093,China;2.Changzhou Dinosaur Park Co.,Ltd.,Changzhou Jiangsu 213022,China)
To improve the design efficiency and reliability of the quadruped robot, and shorten its development cycle, the thesis adopts virtual simulation technique to make a system simulation study for the quadruped robot. This paper has established Kinematic equations and Largrangian dynamics equations of the bionic quadruped robot by analysis of kinematics and dynamics of the virtual prototype.3D model is built in the 3D modeling software,pro/E and then is downloaded to ADAMS.The solid model is built into the ADAMS for the system simulation study by using the three-dimensional modeling software pro/E. Considering the contact of the feet and the ground, the trotting gait is adopted. Through the simulation results, the correctness of kinematics and dynamics mathematical modeling is validated, and the factors influencing the dynamic stability of the robot are analyzed, providing a theoretical basis for the design of the physical prototype.
bionic quadruped robot; kinematics; dynamics; simulation analysis
TH166;TG659
:A
1001-2265(2017)09-0001-04
10.13462/j.cnki.mmtamt.2017.09.001
2016-11-06;
:2016-11-29
国家科技支撑计划项目(2013BAH57F00)
宫赤坤(1968—),男,辽宁大连人,上海理工大学副教授,博士,研究方向为机器人学, (E-mail)gongchikun@126.com。