自动控制原理综合实验设备研制及教学应用
2017-09-25夏静萍
夏静萍, 王 瑛
(南京航空航天大学 自动化学院, 江苏 南京 211106)
自动控制原理综合实验设备研制及教学应用
夏静萍, 王 瑛
(南京航空航天大学 自动化学院, 江苏 南京 211106)
自主研制了基于STM32微处理器的自动控制原理综合实验设备,详细介绍了该实验设备的控制结构、硬件控制方案和软件实现方案等,并基于该实验设备,围绕“控制系统建模和系统性能改善”,开展自动控制原理多层次实验教学。教学实践表明,学生的工程意识和实践能力得到显著提高,同时也丰富了实验教学资源,有效促进自动控制原理精品资源课程建设。
自动控制原理; 实验教学; 伺服控制; STM32; 工程意识
自动控制原理是我校自动化等相关专业开设的重要专业基础课程之一,其配套的自动控制原理实验课程的教学,是实践能力和工程意识培养的重要环节,应强化工程型人才培养的导向作用[1-2]。而传统的自动控制原理实验主要基于“模拟学习机”开展实验[3],存在以下一些不足:“模拟学习机”是仿真型教学设备,主要由运放、电阻、电容构成模拟电路,与实物型控制系统有很大差距,学生很难通过“模拟学习机”对控制系统建立直观认知和系统概念。此外,仿真实验也不能对实际系统中常见的工程型问题进行复现。针对上述问题,我院以培养工程型人才为目标,自主研制了物理系统型教学设备,并将其应用在自动控制原理实验课程,开展了层次丰富的实验教学。
1 实验设备的选择
秉承“有效融合理论教学和工程实践”的指导思想,选择电机伺服控制系统进行研制。电机伺服控制系统是典型的随动系统,能够实现电机的精确定位和跟踪控制,是理论教学中的经典实例[4],便于学生理解控制系统的基本构成,也是目前高校广泛使用的一种教学设备[5-8]。该控制系统具备较强的工程应用背景,能够为学生提供探索和解决工程实际问题的平台。
1.1 控制结构
自动控制原理综合实验设备设置了3种控制模式,即开环速度控制、闭环速度控制及闭环位置控制。开环速度控制模式主要帮助学生认知该控制系统的控制对象、建立其数学模型;闭环控制模式让学生了解并掌握控制系统的工作原理和设计过程。闭环位置控制模式下的控制结构框图如图1所示,采用这种内环电流环-中环速度环-外环位置环的3环复合控制结构,能够保障该系统具备良好的控制精度和抗干扰性。控制回路中的数字控制器选用了工程应用较为广泛的PID控制器和频域校正网络两种形式。
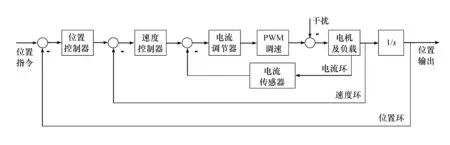
图1 控制结构框图
1.2 硬件控制方案
设备的硬件控制方案见图2,采用意法半导体公司推出的STM32微处理器构成主控单元,该处理器基于Cortex-M4内核,兼具较高的运行速度和精度及良好的经济性[9]。执行机构采用直流伺服电机带动负载运动,电机同轴安装了传感器增量式光电编码器,采集电机的实时位置信号,并经过四倍频判向电路调理后送入STM32微处理器。该光电编码器的脉冲计数为10 000线/转,经过调理电路后,测量精度可达0.009°。微处理器根据监控计算机传送的指令信号和控制器参数及光电编码器采集的当前信息,解算出控制信号,并经由电机驱动电路驱动电机转动,实现对电机的实时控制。STM32微处理器与监控计算机之间采用以太网通信方式进行数据传输。与串口通信方式相比,以太网通信在单位时间内的数据传输量更大且传输速度更快,保障系统具有更高的控制精度。
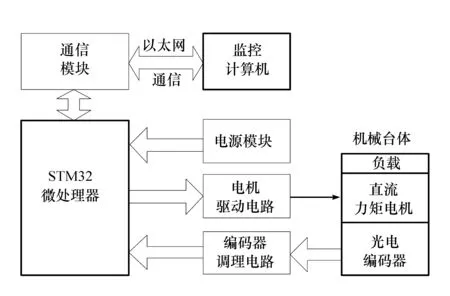
图2 硬件控制方案示意图
1.3 软件设计及实现方案
设备的控制软件包括实时控制软件和实时监控软件构成。实时控制软件基于MDK开发平台采用C语言编写,主要实现电机控制信号解算、传感器数据采集及上下位机通信等功能。主程序的控制流程如图3所示,设置了两路中断,一路为网络通信中断,用于接收监控计算机的指令和数据;一路为频率1 kHz的定时器控制中断。
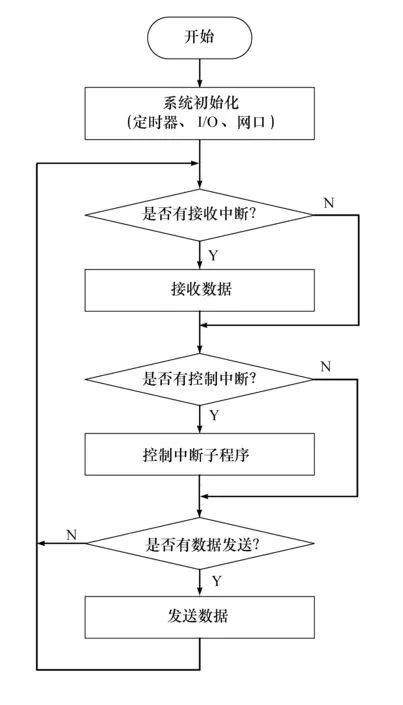
图3 主程序流程图
当查询到控制中断时,进入控制中断子程序,具体的流程见如图4。首先对光电编码器的信号进行采集和处理,然后判断当前的控制模式和响应的类型,确定具体实验项目,再进一步根据设置的控制算法解算并发送控制信号。
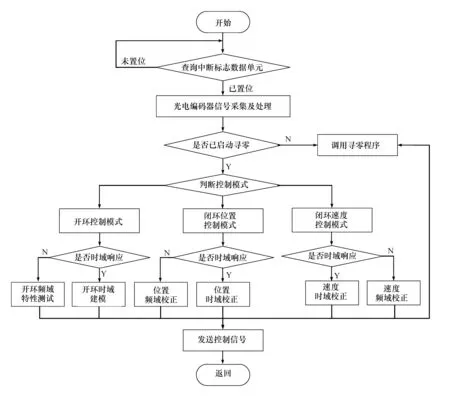
图4 控制中断子程序流程图
1.4 主要功能界面
1.4.1 数字示波器子界面
该界面由示波器显示区域和示波器设置区域组成。示波器的显示区域按照被测量的不同采用不同颜色绘制实验曲线。示波器的设置区主要针对示波器的类型、测量量的类型和测量量的量程进行设置。示波器类型包括显示、移动、缩放和测量等功能。选中测量功能时,实验曲线上将出现2个十字光标用于坐标测量;同时2个光标之间的坐标差也将显示在测量数据框内,如图5所示。

图5 数字示波器界面
1.4.2 数字信号发生器界面
在不同的实验项目中设置了不同的信号发生器子界面。进行时域模型测试实验时,界面如图6(a)所示,对信号的类型、幅值等进行设置;当实验项目为频域特性测试实验时,信号发生器如图6(b)所示,可以对频域信号进行手动设置或自动设置。无论使用时域测定法还是频域测定法,确定数学模型后都需要对模型参数进行校验[10-11]。因此在2个界面中均加入“模型估计”的功能。输入估计出的数学模型参数后,在示波器中显示相应的估计响应曲线,用于在线调整和校验数学模型参数。

图6 数字信号发生器子界面
1.4.3 时域性能分析子界面
进行时域校正类的实验时,为了方便学生实时调整控制器参数,设置了时域性能分析的功能按钮。点击该按钮,进入时域性能分析界面,如图7所示,能够绘制当前控制参数下的时域响应曲线,并计算时域性能指标。曲线显示区域设置了选单栏,方便对实验曲线进行保存、还原、移动、放大、删除,便于学生对实验参数进行反复调试。

图7 时域性能分析子界面
1.4.4 频域性能分析界面
该界面如图8所示,主要用于显示由频域响应曲线及频域数据,该功能还可以与模型估计功能相结合。以频率特性测试实验为例,实线代表实际频域特性曲线,虚线代表根据估计模型模块的传递函数绘制的模型频域特性曲线;通过将两种曲线绘制在同一坐标下,实现对数学模型参数的校验。
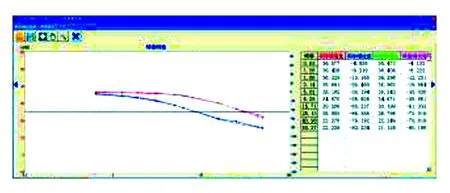
图8 频域性能分析界面
2 实验设备的教学应用
2.1 教学实践
自动控制原理综合实验设备实物图见图9,历经3年的不断研制和改进,已投入教学一线使用,面向我院自动化专业学生进行自动控制原理的实验教学。

图9 自动控制原理综合实验设备实物图
围绕“控制系统的建模和控制系统性能改善”,开展了分层次、分阶段的实验教学,以实现循序渐进地培养学生对控制系统的认知、分析和设计能力。开设的实验项目见表1,首先从基础认知型实验开始,通过该层次的实验项目,让学生认识控制对象并掌握数学模型的常用方法;在此基础上开展设计型实验,包括“控制系统速度回路PID校正”“控制系统位置回路PID校正”“控制系统频域校正”。这一层次的实验教学主要引导学生将经典控制理论知识点运用到实际控制系统的性能改善中。进一步以开放实验选做的形式,面向专业基础良好的学生,开展了更深层次的综合型实验——对控制系统进行综合设计以及控制算法设计和编写等,让学生更深入地了解控制系统软件设计、开发及调试的常用方法。
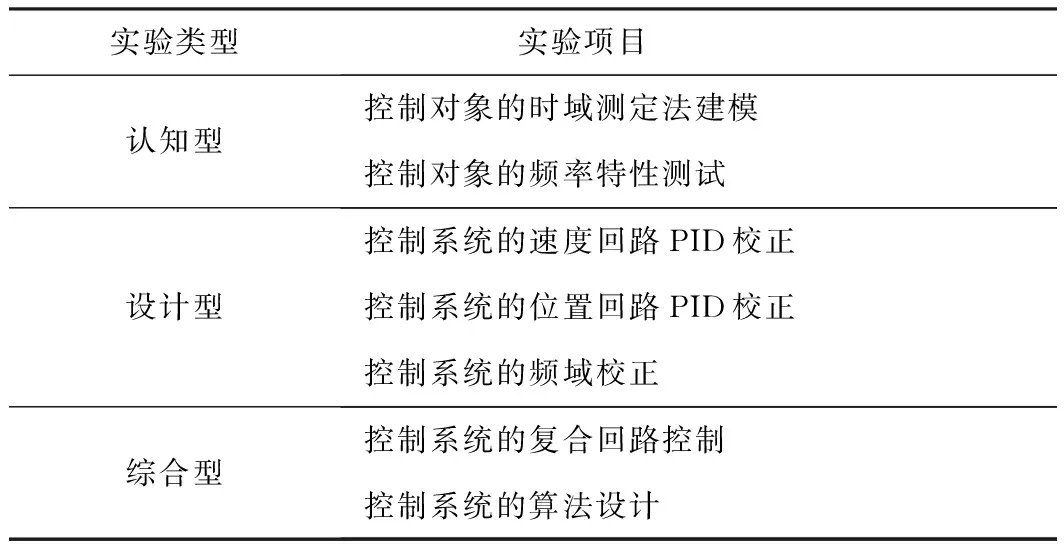
表1 配套实验教学项目
2.2 教学反馈
纸上得来终觉浅,绝知此事要躬行——这是开展实验后学生获得的最深刻的感受。一方面,理论教学中的控制对象、控制器、执行机构等一系列抽象的控制概念都映射到具体的实物中,极大激发了学生的学习热情和积极性。另一方面,该设备向学生提供了探索和解决工程问题的平台,达到切实培养学生工程意识和解决实际问题能力的目的。以“控制对象的时域测定法建模实验”为例,尽管通过理论教学,学生已经了解了电机的数学模型,能够近似为一阶系统,但在实际实验操作中又会发现,电机的实际模型参数会随着输入电压的变化而变化,甚至表现出一些非线性特征,如饱和特性、死区特性等。这就激发了学生对实验参数进行不断尝试和探索,找出数学模型参数的规律。学生通过实验探究,对控制对象有更为全面认知,实验过程对培养学生的工程意识有着积极意义,这也是我们研制并应用该教学设备的初衷。
3 结语
以培养工程型人才的教学需求为导向,自主研制了基于STM32的自动控制原理综合实验设备,并将其应用于自动控制原理实验课,获得了良好的教学效果,有效培养了学生的工程意识和实践能力。通过该教学设备的研制和应用,也进一步丰富了自动控制原理的硬件实验教学资源,有效促进了国家级精品资源共享课程建设。
References)
[1] 黄晓玫,李鸿飞,黄涛.强化培养学生实践能力和创新能力的探索与实践[J].实验技术与管理,2014,31(2):1-4.
[2] 徐颖秦,潘丰.自动控制原理立体化教学新体系的探索与实践[J]. 电力系统及其自动化学报, 2012, 24(2):152-155.
[3] 王凤如,王小扬,王瑛.信号、系统与控制实验教程[M].北京:高等教育出版社,2004.
[4] 胡寿松.自动控制原理[M]. 6版.北京:科学出版社,2013.
[5] 孙大卫,丁兴俊,毕经存,等.一种典型自动控制原理实验教学设备研究[J].实验技术与管理,2011,28(7):79-81.
[6] 侯震,杨建华,唐忠林.随动系统实验装置的数字化改造[J].实验技术与管理,2010,27(12):84-86:
[7] 彭秀艳,王显峰,秦亮亮.设计型实验设备的设计与开发[J].实验室研究与探索,2008,27(10):29-30.
[8] 孙铁成,郭志刚,钟贵烈,等.利用RTW和数据采集卡实现随动系统实验平台[J].实验技术与管理,2010,27(6):47-50.
[9] 张慧娟.STM32F4系列抢占Cortex—M4内核先机[J]. EDNCHINA电子设计技术,2011, 18(11):16-18.
[10] 张溥明,王志中.系统模型与辨识[M]. 上海:上海交通大学出版社,2015.
[11] 刘金琨, 沈晓蓉,赵龙.系统辨识理论及MATLAB仿真[M]. 北京:电子工业出版社,2013.
Development of comprehensive experimental equipment with automatic control principle and its teaching application
Xia Jingping, Wang Ying
(College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China)
The comprehensive experimental equipment with the automatic control principle based on the STM32 microprocessor is independently developed. The control structure, the hardware control scheme, the software implementation scheme, etc., of the equipment are illuminated in detail. Based on this experimental equipment, the multi-level experimental teaching of the Automatic Control Principle course is carried out around the “Control system modeling and system performance improvement.” The teaching practice shows that the students’ engineering awareness and practical ability are improved remarkably. Meanwhile, this teaching equipment enriches experimental teaching resources, promoting the construction of the excellent course of Automatic Control Principle.
automatic control principle; experimental teaching;servo control; STM32; engineering awareness
TP275;G642.423
: A
: 1002-4956(2017)09-0104-05
2017-03-01修改日期:2017-05-04
江苏省高等教育教改项目(2015JSJG176);南京航空航天大学实验技术研究与开发项目(2015050300026834)
夏静萍(1983—),女,江苏宿迁,工学硕士,实验师,主要研究方向为自动控制原理实践教学.
E-mail:xiajingping@nuaa.edu.cn
10.16791/j.cnki.sjg.2017.09.026