基于S7-200异步电动机调速实验台研制及调试
2017-09-25耿望波
高 瑜, 程 勇, 耿望波, 郑 浩
(西安科技大学 电气与控制工程学院, 陕西 西安 710054)
基于S7-200异步电动机调速实验台研制及调试
高 瑜, 程 勇, 耿望波, 郑 浩
(西安科技大学 电气与控制工程学院, 陕西 西安 710054)
研制了一套基于S7-200电动机调速实验平台,通过编码器采集电动机转速,反馈给可编程控制器(PLC),PLC经过比较判断,输出模拟量,控制变频器,实现对电动机变频调速闭环控制;同时使用电位器,调节磁粉制动器输出,模拟负载的变化特性。通过触摸屏动态监控电动机转速和负载特性。实验装置预留各种接口,学生可以自主在该实验平台组网和上位机组态控制等实验。
异步电动机; 调速; 实验台; PLC; 变频器; 编码器
针对西安科技大学电气工程专业学生毕业后的就业方向分为电力系统和工矿自动化两个方向,而工矿自动化方向大多就业于工矿企业,电动机调速应用和可编程控制器(PLC)应用非常广泛[1-2]。为此开发了异步电动机调速实验台。
1 实验原理
电动机作为工矿企业主要电气设备,应用于风机和水泵等电动机械。在许多工况下,不需要设备满载运行,而是降速运行,可以节约大量的电能,减少企业电费的支出。目前常用的方法是采用变频调速的方法,对电动机转速进行控制[3-4]。
1.1 调速原理
电动机变频调速原理如下:
异步电动机转速n公式为

(1)
式中,p为磁极对数,s为转差率,f为频率。
极对数和转差率不易改变,只有频率容易改变。通过改变频率可以实现对转速的控制,来满足不同的工况需求。为了能够实现自动控制,通常采用PLC控制变频器、变频器控制电动机转速,本系统采用西门子公司的PLC和变频器。各设备功能和参数见表1。
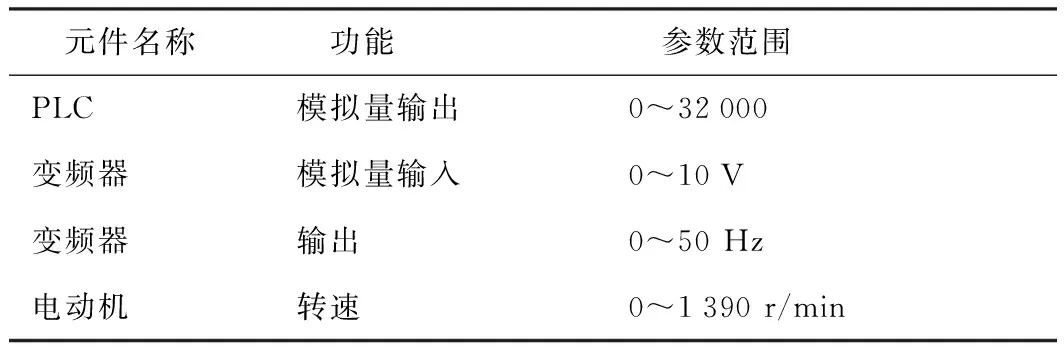
表1 PLC、变频器和电动机转速间输出控制范围
1.2 编码器测速原理
由式(1)可知,在p和s不变的情况下,n和f关系一一对应。通过编码器可以测量其速度和方向,反馈给PLC控制器,改变变频器输出频率,实现对电动机转速控制,形成闭环控制。实验中使用的光电编码器型号E6B2-CWZ6C,1000P/R,0.1 s内输出脉冲数为N,则电动机转速为

(2)
2 实验平台硬件设计
2.1 硬件结构设计
系统采用S7-200PLC中S7-226作为主控制器,通过对模拟量模块输出,给变频器输入控制调节信号,控制变频器输出频率,实现对电动机转速控制调节;通过编码器对电动机转速进行检测,反馈给PLC,触摸屏对电动机转速实时显示和控制;通过电位器的调节,控制磁粉制动器输出[5]。实验台硬件逻辑框图见图1。
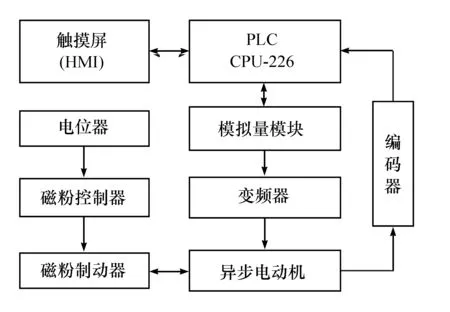
图1 实验台逻辑硬件框图
2.2 系统电路设计
系统硬件电路(见图2)分为主电路和控制电路两部分。

图2 系统硬件电路
(1) 主电路电源通过QF和FU接入实验台,在变频器没有故障的情况下,接通KM1,电动机变频运行。在变频器异常或负荷满载状况下,断开KM1,接通KM2,实现系统旁路控制[6]。
(2) 控制电路所需DC 24 V电源由开关电源提供,分别供给PLC、变频器、编码器、触摸屏和磁粉控制器。
PLC输入口分别控制电动机正转、反转、停止和编码器等,输出信号主要控制变频器投切的中间继电器、旁路运行中间继电器和显示等。PLC和触摸屏通过RS-485进行通信。
PLC模拟量模块输出模拟信号“AIN+”和“AIN-”给变频器模拟量输入口,实现对变频器的频率控制。
编码器输出脉冲信号,送给PLC高速计数输入口,对电动机转速和方向进行检测。磁粉控制器通过电位器调整输入电压量,控制磁粉制动器输出功率的大小。
2.3 系统主要元件清单
该实验台主要元件清单及功能见表2。
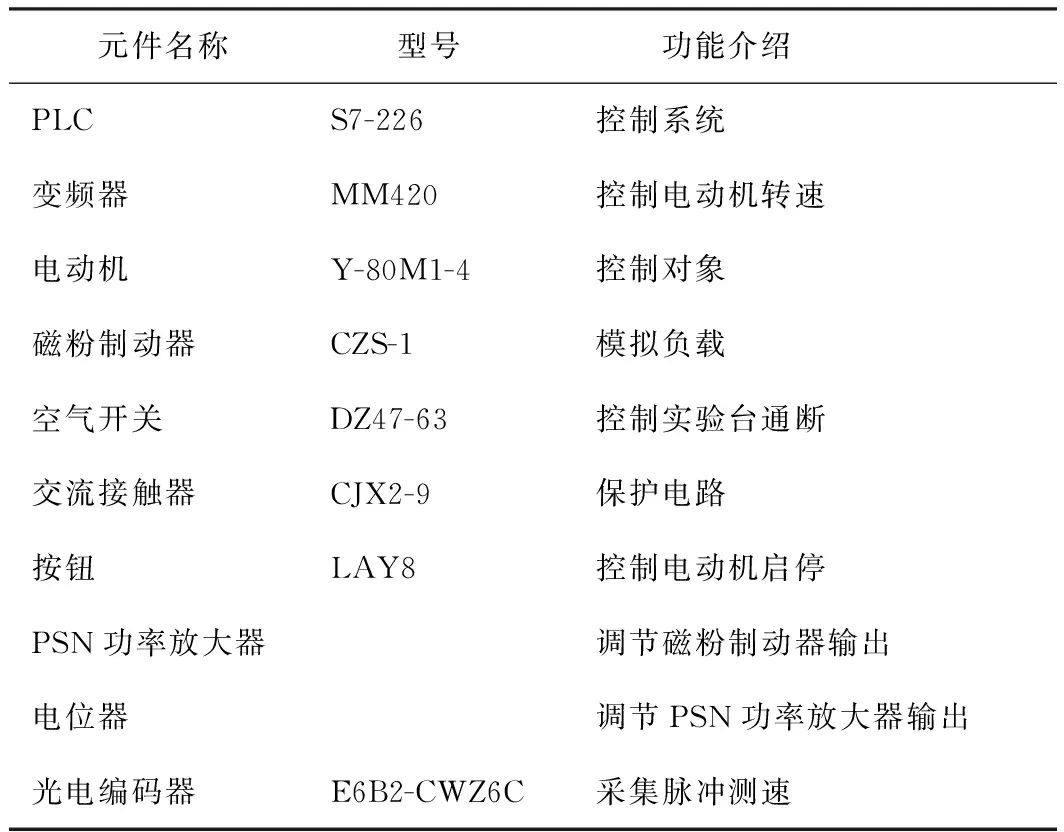
表2 主要电气元件明细及功能介绍
2.4 实验台实物图及功能介绍
实验台分为电气控制实验台和磁粉制动器实验台。
(1) 电气控制实验台,主要由PLC S7-226模块、模拟量输入输出模块、Profibus-DP模块、以太网模块、触摸屏和中间继电器等组成,实现对整个系统控制和显示[7]。实物见图3。

图3 电气控制实验台实物图
(2) 磁粉制动实验台,主要由电动机、磁粉制动器、编码器、变频器、接触器、热继电器和时间继电器等组成,是整个系统的执行机构,实物图见图4[8]。

图4 磁粉制动器实验台实物图
3 软件设计
3.1 PLC软件编写
3.1.1 主程序流程图
主程序初始化后,检测变频器故障反馈信号,如果变频器正常,启动电动机;如果变频器故障,切换为旁路运行。电动机启动后,光电编码器开始发送脉冲至PLC, PLC高速计数器进行数据采集并进行算法处理后,判断速度差是否超过设置的阈值,进而判定是否要进行PID调节。最后将运行参数在主函数中显示[9]。主程序流程见图5。

图5 系统主程序流程
3.1.2 中断子程序流程图
在子程序中如果判断速度差超限,进入中断程序,进行PID调节。由于电动机的实时速度会出现波动,为了消除波动带来了误调节,采用多次判定方法,如果在某一时刻出现“波动”超过20次,则认为是速度出现大幅下降。这时将速度差累加后求平均值,将其速度差转换为电压差,再进行PID调节运算。运算得到结果后传送至PLC,经模拟量模块,输出给变频器。同时,将电动机的运行参数传回主函数[10]。中断子程序流程见图6。

图6 中断子程序流程
3.2 威纶触摸屏软件
(1) 采用威纶公司的触摸屏,型号为MT8100iE,该触摸屏拥有比较齐全的接口资源,能较好地满足本系统的实际需要[11]。触摸屏的主界面见图7。
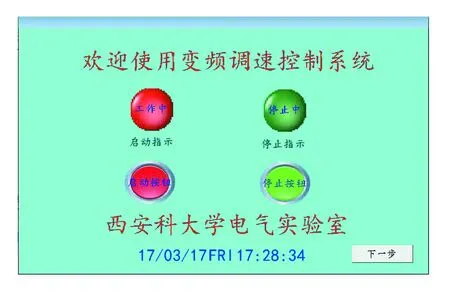
图7 触摸屏主界面
(2) 威纶触摸屏采用的组态软件为EasyBuilder -PRO,该组态软件拥有的趋势图模块可以很好地记录电动机运行时的速度,并将其显示在触摸屏之上,可以在远端对电动机的实时运行情况进行监控。
3.3 西门子变频器的设置
对西门子MM420的变频器进行参数设置,其他的参数都为默认参数,其中主要设置的参数有P0700、P1000,这2个参数的意义见表3。
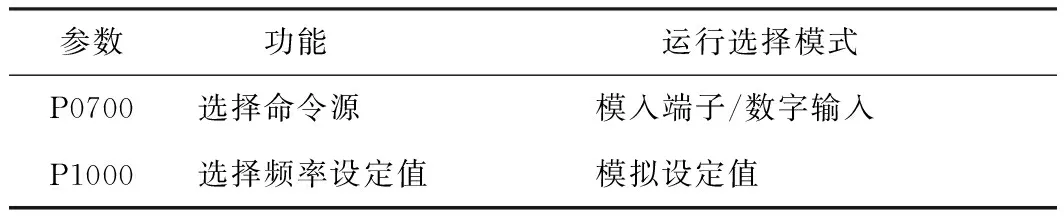
表3 变频器参数设定
本次实验中,使用的是PLC的模拟量控制变频器的输出,所以,P0700和P1000 都设置为2。
4 调试过程中遇到问题及解决方案
4.1 PC和PLC连接问题
PC机无法与PLC连接时,使用PPI电缆进行程序下载;进行PC/PG接口设置的时,使用COM口进行通信,而不是使用USB口,方可连接成功;下载程序的时候要使用COM口。
4.2 变频器的非线性问题
当PLC给定变频器一定的模拟量时,变频器的输出量并非是理论值,而是有所衰减,这会导致光电编码器采集回的速度和理论值差值很大,会对电动机速度的调节造成影响。为了削弱变频器的非线性输出影响,在程序中,给计算出的理论速度值,乘以一个调节系数,使其更接近实际转速,这样的调节效果也更好。
4.3 PLC与触摸屏通信问题
本实验台使用威纶MT8100iE和西门子PLC S7-200,在MT8100iE与PLC的进行通信时,需要自制RS-485通信线。接线要求见表4。

表4 HMI和PLC通信线连接要求
4.4 编码器采集问题
在使用光电编码器的过程中,无法检测到光电编码器的输出,或者输出混乱。用示波器检测后发现光电编码器的输出不正常,为各种谐波的叠加,周期也不等。因为E6B2-CWZ6C其输出方式为NPN集电极开路输出,所以在其e、c之间加上合适的电阻后,能够稳定输出。
5 实验台调试结果分析
5.1 电动机调速实验结果
在电动机正常启动、速度达到理论值后,旋转增大电位器输出,改变磁粉控制器的输出(PSN功率放大器)。模拟负载增加的工况下,在触摸屏上可以明显看到电动机的速度下降,过几秒后,经过PLC的程序控制,调节电动机的速度出现上升,到达理论值,其速度围绕理论值上下出现较小的波动。
5.2 磁粉制动器调试结果
本系统中采用磁粉制动器模拟实际负载的工作情况,磁粉控制器的输出由电位器控制,通过旋转电位器的旋钮调节模拟负载的大小。由于采用了多次判定速度差是否超限的方法,所以在实际的速度曲线中,有一定的阶梯状,是由于多次累加的延时,导致速度的采集有较小的延时,但此并不影响电动机的实际运行情况[12]。
图8是加磁粉制动器后电动机运行图,图中的直线是电动机的理论速度,是一恒定值。折线部分是电动机的实际运行速度。电动机正常启动后,速度一直沿着理论值上下波动;再调整电位器的旋钮,即增大了模拟负载后,其速度出现了明显的下降,速度曲线出现了凹陷;而后减小电位器的输出,即减小负载,速度出现了回升,到达理论值附近;最后在点击触摸屏上的“停止”后,电动机逐渐停机,速度曲线下降到零。

图8 加磁粉制动器后电动机运行图
References)
[1] 李永涛,葛智勇,田友伟,等.强化实践教育培养创新能力[J].实验室研究与探索,2014,33(1):160-163.
[2] 高瑜,付周兴,焦妍君,等.《电气自动化专业》实践教学改革探讨[J].高校实验室工作研究,2011(1):37-38.
[3] 高瑜,孙思雅,赵建文,等. 继电保护专题实验实施过程及设备研制[J].实验技术与管理,2016,33(10):171-175.
[4] 高瑜,付周兴,李忠,等. 电气专业综合设计实验教学探讨[J]. 实验室科学,2012,15(3):34-36.
[5] 中华人民共和国国家质量监督检验检疫总局.GB/T26662-2011 磁粉制动器[S].北京:中国标准出版社,2011.
[6] 许建凤,傅永锋.多模式PLC实训平台设计与研制[J].实验技术与管理,2012,29(11):65-67.
[7] 冯清秀.机电传动控制[M].5版.武汉:华中科技大学出版社,2011.
[8] 陈英俊,黄崇林.交流伺服电机的PLC控制综合性实验开发与设计[J]. 实验技术与管理,2017,34(2):147-150.
[9] 焦志刚,杨慧远,杜宁.基于Petri网的PLC控制系统设计研究[J].自动化仪表,2017,38(2):18-21.
[10] 王阿根.西门子S7-200 PLC编程实例精解[M]. 北京:电子工业出版社,2011.
[11] 刘伦富.PLC与触摸屏应用技术[M]. 北京:机械工业出版社,2014.
[12] 张伟林,吴清荣,赵世海.西门子PLC、变频器与触摸屏综合应用实训 [M].北京:中国电力出版社,2014.
Development and debugging of experimental platform for asynchronous motor speed regulation based on S7-200
Gao Yu, Cheng Yong, Geng Wangbo, Zheng Hao
(College of Electrical and Control Engineering, Xi’an University of Science and Technology, Xi’an 710054, China)
An experimental platform for the motor speed regulation based on S7-200 is developed. Through the encoder to collect the motor speed for the feedback to the PLC, the comparative judgment is carried out by the PLC to make the output of the analog quantity, control the frequency converter and realize the closed-loop control of motor variable frequency speed regulation. At the same time, the potentiometer is used to regulate the output of the magnetic powder brake and simulate the changing characteristics of the load. The motor speed and the loading characteristics of magnetic powder brake are dynamically monitored and controlled by the touching screen. The experimental device is provided with various interfaces, and the students can independently carry out the experiments for the networking, the host computer configuration control, etc., on this experimental platform.
asynchronous motor; speed regulation; experimental platform; PLC; frequency converter; encoder
G642
: A
: 1002-4956(2017)09-0085-05
2017-03-24
陕西省科学研究发展计划项目(2016GY-064);西安科技大学2016年度校级教育教学改革与研究项目(JG16029)
高瑜(1978—),男,陕西横山,硕士,高级工程师 从事电气控制等方面的教学研究.
E-mail:xkdgy@163.com
10.16791/j.cnki.sjg.2017.09.022