基于模糊理论PID控制
2017-09-24罗骏琪
罗骏琪
摘 要:模糊控制实质上是一种非线性控制,从属于智能控制的范畴。模糊控制的一大特点是既有系统化的理论,又有大量的实际应用背景。本文主要介绍模糊理论结合PLC运用在净水厂的加药系统中,次氯酸钠投加问题中出现滞后现象,解决次氯酸钠投加过多或不足所导致水中含氯量不稳定的问题。
关键词:PID控制;模糊;设计
一.在运行过程中遇到的问题
净水厂的补氯工序中投加点和测量点并不是在同一点上,从投加点到测量点水流经过约10min的距离。
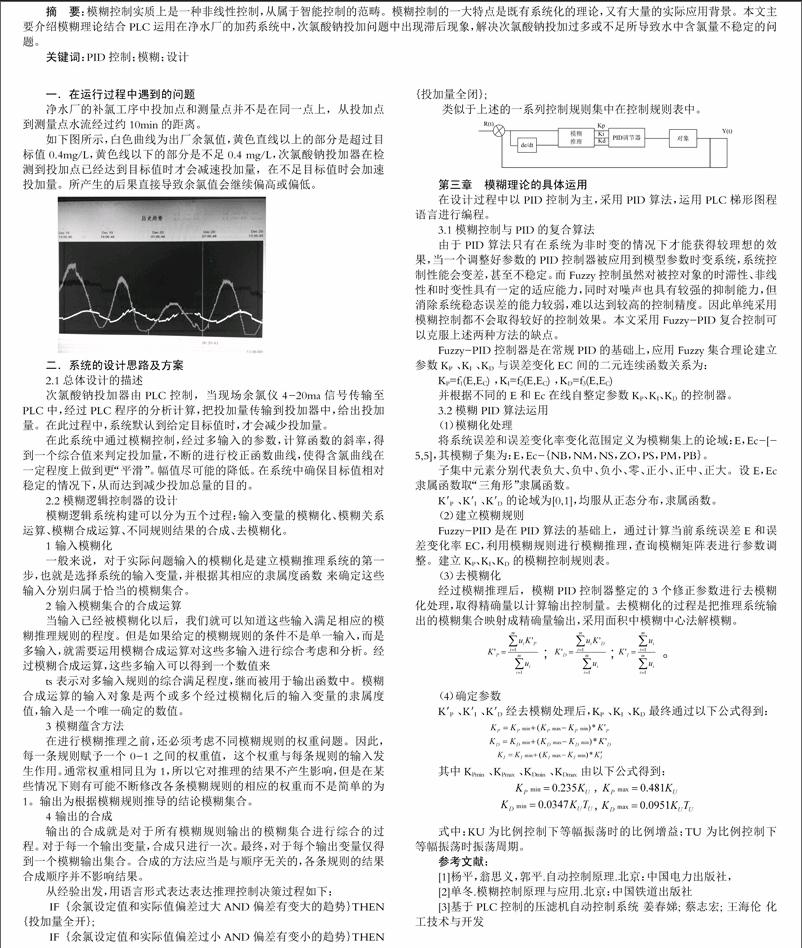
如下图所示,白色曲线为出厂余氯值,黄色直线以上的部分是超过目标值0.4mg/L,黄色线以下的部分是不足0.4 mg/L,次氯酸钠投加器在检测到投加点已经达到目标值时才会减速投加量,在不足目标值时会加速投加量。所产生的后果直接导致余氯值会继续偏高或偏低。
二.系统的设计思路及方案
2.1总体设计的描述
次氯酸钠投加器由PLC控制,当现场余氯仪4-20ma信号传输至PLC中,经过PLC程序的分析计算,把投加量传输到投加器中,给出投加量。在此过程中,系统默认到给定目标值时,才会减少投加量。
在此系统中通过模糊控制,经过多输入的参数,计算函数的斜率,得到一个综合值来判定投加量,不断的进行校正函数曲线,使得含氯曲线在一定程度上做到更“平滑”。幅值尽可能的降低。在系统中确保目标值相对稳定的情况下,从而达到减少投加总量的目的。
2.2模糊逻辑控制器的设计
模糊逻辑系统构建可以分为五个过程:输入变量的模糊化、模糊关系运算、模糊合成运算、不同规则结果的合成、去模糊化。
1 输入模糊化
一般来说,对于实际问题输入的模糊化是建立模糊推理系统的第一步,也就是选择系统的输入变量,并根据其相应的隶属度函数 来确定这些输入分别归属于恰当的模糊集合。
2 输入模糊集合的合成运算
当输入已经被模糊化以后,我们就可以知道這些输入满足相应的模糊推理规则的程度。但是如果给定的模糊规则的条件不是单一输入,而是多输入,就需要运用模糊合成运算对这些多输入进行综合考虑和分析。经过模糊合成运算,这些多输入可以得到一个数值来
ts 表示对多输入规则的综合满足程度,继而被用于输出函数中。模糊合成运算的输入对象是两个或多个经过模糊化后的输入变量的隶属度值,输入是一个唯一确定的数值。
3 模糊蕴含方法
在进行模糊推理之前,还必须考虑不同模糊规则的权重问题。因此,每一条规则赋予一个 0-1 之间的权重值,这个权重与每条规则的输入发生作用。通常权重相同且为 1,所以它对推理的结果不产生影响,但是在某些情况下则有可能不断修改各条模糊规则的相应的权重而不是简单的为 1。输出为根据模糊规则推导的结论模糊集合。
4 输出的合成
输出的合成就是对于所有模糊规则输出的模糊集合进行综合的过程。对于每一个输出变量,合成只进行一次。最终,对于每个输出变量仅得到一个模糊输出集合。合成的方法应当是与顺序无关的,各条规则的结果合成顺序并不影响结果。
从经验出发,用语言形式表达表达推理控制决策过程如下:
IF{余氯设定值和实际值偏差过大AND偏差有变大的趋势}THEN{投加量全开};
IF{余氯设定值和实际值偏差过小AND偏差有变小的趋势}THEN{投加量全闭};
类似于上述的一系列控制规则集中在控制规则表中。
第三章 模糊理论的具体运用
在设计过程中以PID控制为主,采用PID算法,运用PLC梯形图程语言进行编程。
3.1模糊控制与PID的复合算法
由于PID算法只有在系统为非时变的情况下才能获得较理想的效果,当一个调整好参数的PID控制器被应用到模型参数时变系统,系统控制性能会变差,甚至不稳定。而Fuzzy控制虽然对被控对象的时滞性、非线性和时变性具有一定的适应能力,同时对噪声也具有较强的抑制能力,但消除系统稳态误差的能力较弱,难以达到较高的控制精度。因此单纯采用模糊控制都不会取得较好的控制效果。本文采用Fuzzy-PID复合控制可以克服上述两种方法的缺点。
Fuzzy-PID控制器是在常规PID的基础上,应用Fuzzy集合理论建立参数KP 、KI 、KD 与误差变化EC 间的二元连续函数关系为:
KP=f1(E,EC) ,KI=f2(E,EC) ,KD=f3(E,EC)
并根据不同的E和Ec在线自整定参数KP、KI、KD 的控制器。
3.2模糊PID算法运用
(1)模糊化处理
将系统误差和误差变化率变化范围定义为模糊集上的论域:E,Ec-[-5,5],其模糊子集为:E,Ec-{NB,NM,NS,ZO,PS,PM,PB}。
子集中元素分别代表负大、负中、负小、零、正小、正中、正大。设E,Ec隶属函数取“三角形”隶属函数。
K′P 、K′I 、K′D 的论域为[0,1],均服从正态分布,隶属函数。
(2)建立模糊规则
Fuzzy-PID是在PID算法的基础上,通过计算当前系统误差E和误差变化率EC,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。建立KP、KI、KD 的模糊控制规则表。
(3)去模糊化
经过模糊推理后,模糊PID控制器整定的3个修正参数进行去模糊化处理,取得精确量以计算输出控制量。去模糊化的过程是把推理系统输出的模糊集合映射成精确量输出,采用面积中模糊中心法解模糊。
(4)确定参数
K′P 、K′I 、K′D 经去模糊处理后,KP 、KI 、KD 最终通过以下公式得到:
其中KPmin 、KPmax 、KDmin 、KDmax 由以下公式得到:
式中:KU为比例控制下等幅振荡时的比例增益;TU 为比例控制下等幅振荡时振荡周期。
参考文献:
[1]杨平,翁思义,郭平.自动控制原理.北京:中国电力出版社,
[2]单冬.模糊控制原理与应用.北京:中国铁道出版社
[3]基于PLC控制的压滤机自动控制系统 姜春娣; 蔡志宏; 王海伦 化工技术与开发
