红枣去核机及其槽轮机构仿真分析
2017-09-22曹劲草
曹劲草
黄晓华
史正元
黄亚伟
齐贺男
(南京理工大学机械工程学院,江苏 南京 210094)
红枣去核机及其槽轮机构仿真分析
曹劲草
黄晓华
史正元
黄亚伟
齐贺男
(南京理工大学机械工程学院,江苏 南京 210094)
设计了一种红枣去核机,可依次实现红枣的上料、定位、输送、冲核、切片、落枣等加工工序,从而加工出可食用的红枣片。对去核机的传动系统进行了设计,利用Pro/E对槽轮机构进行了建模和运动学仿真分析,提高了槽轮机构的运动性能。
红枣去核机;传动系统;槽轮机构;运动学仿真
中国于20世纪80年代后期开始着手研究去核机,并陆续推出了一些不同种类的去核机。但由于一些关键技术问题未能很好解决,红枣加工的质量难以控制[1-2]。宁天德[3]设计的半自动硬枣去核划皮机,采用上下往复运动机构和蜗旋凸轮步进间歇机构组成传动系统,双输出轴的减速箱把上下往复运动和步进间歇运动机构通过转盘支座连成一体,解决了去核装置上下往复运动与间歇运动机构的一致性和不同形状的红枣定位夹紧问题,去核效果较好。但是采用的是人工上下料方式,自动化程度及生产效率低(240个/min)。彭三河[4]设计了一种红枣去核装置,采用带16个对称圆柱孔的圆盘型工作台固定红枣、采用上下工作头双针定位红枣,去核效果较好,但仍采用人工上料方式,不适合大批量红枣去核。刘振省[5]设计了一种全自动的红枣去核机,采用转盘式进料机构进行上料,在嵌枣区装有定量拨枣滚刷,滚刷的旋转可以保证每个枣孔内只有一个红枣,转盘做间歇式旋转,每次步进一个工位,冲针做往复运动并完成去核作业。这种去核机构比较简单,实用性较强,但去核时需要人工配合供料,效率较低,自动化程度不够高。
笔者在间歇式红枣去核机的基础上设计出了一种上料机构,在保证去核率的同时提高红枣的上料率,从而提高红枣的加工效率。
一直以来,在中国红枣去核机领域,红枣的上料率问题都没能得到很好地解决,红枣去核机是用于红枣深加工的自动化设备,企业对去核机的性能要求也越来越严格,主要包括以下几个方面[6]。
(1) 结构设计的模块化和标准化:同一红枣的外形虽然比较规则,截面呈椭圆形,但是不同个体之间的尺寸却存在明显差异,若是为了不同大小的红枣重新设计去核机,会造成人力资源和社会资源的浪费,模块化设计却能很好地解决这个问题。将去核机的结构分成不同模块进行设计,相互之间可以拆卸,便于安装更换,只要设计不同规格的定位夹紧模块和去核模块就能对不同大小的红枣完成去核,极大程度地节省了资源。标准化的结构不仅可以节省资源,更能减少设计人员不必要的脑力劳动,市场上的标准化元件种类多、范围广,基本囊括了结构设计所需要的一切资源,所以模块化和标准化是结构设计的基本要求。
(2) 较高的自动化程度:红枣去核作业以前是人工完成,耗费大量人力,而且不够卫生,而红枣去核机的主要作用就是代替人力完成红枣的去核作业,若不能实现较高程度的自动化,也就失去了自身的价值和意义。目前市场上有很多半自动红枣去核机,需要靠人工放枣才能实现红枣的上料,相比传统人工去核的方式有很大进步,但是并不能独自完成加工,仍然需要耗费人力,所以自动化程度的高低是评判红枣去核机的重要标准。
(3) 智能化的控制系统:去核机的运行需要人来控制,人性化、智能化的操作控制系统更方便人机交互,也能对机器的常见故障进行检测、诊断,是去核机不可或缺的部分。
本研究在基于槽轮机构的间歇式红枣去核机的基础上,设计了去核机的传动系统,并提出了一种与之匹配的红枣上料机构,能较大程度地提高红枣的上料率,从而提高红枣的去核效率。其原理在于:槽轮机构为红枣去核机整体提供间歇式的输送动力,根据槽轮机构的动停比,设计与之相匹配的曲柄滑块机构用于红枣的上料和去核;为了能保证每次有且只有一颗红枣进入枣杯,设计了相应的辅助上料机构,包括送枣管道、振动料斗与拨枣转盘,振动料斗使得红枣有序排列在送枣管道中前进,拨枣转盘的转动周期与动停比相匹配,保证每次停歇时,能有一颗红枣通过上料机构进入料斗。这种上料方式可以与槽轮机构的间歇式运动较好地匹配,结构简易,工作效率高,而且能保证较高的上料率。
1 红枣去核机的整体方案确定
图1是一种槽轮式红枣去核机,红枣由电磁震动上料器15输送到送料道中,并自动排列、依次前进,经过送料道的弯道时,被弹簧丝卡住,拨枣转盘14旋转一周,卡在弯道处的红枣被拨枣转盘14上的拨枣齿拨入上料筒内[7]。落入上料筒内的红枣被上料推杆推入枣杯2中,上料推杆与曲柄滑块机构13连接,进行竖直方向的直线往复运动。
进入枣杯的红枣被主传动链轮3带动,经过去核机构时由冲针完成去核,去核机构的运动原理与上料机构相同,都是由曲柄滑块机构13驱动。去完核的红枣继续随着枣杯2运动,到下方的刀槽式转盘5处,由于重力的作用下落到刀槽式转盘5的槽中,然后随着刀槽式转盘5的转动,在钢丝6处完成切片,之后由重力作用落下[8]。
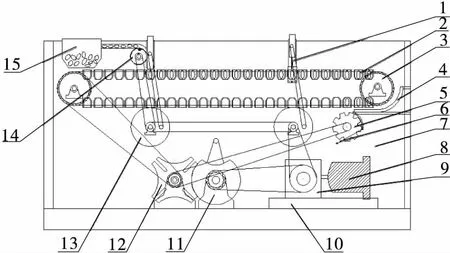
1. 冲针 2. 枣杯 3. 主传动链轮 4. 挡板 5. 刀槽式转盘 6. 钢丝 7. 机架 8. 电机 9. 减速器 10. 底座 11. 拨盘 12. 槽轮 13. 曲柄滑块机构 14. 拨枣转盘 15. 电磁震动上料器
图1 槽轮式红枣去核机
Figure 1 Red jujube pitting machine with Geneva mechanism
2 传动系统方案设计
设计的红枣去核机传动系统方案见图2,由电机3提供原动力,经过减速器2降低扭矩,之后动力传递到带轮,由带传动机构4将动力分成两部分:一部分传递到曲柄滑块机构1,完成去核作业;另一部分传递到槽轮机构6,产生间歇运动。槽轮机构6产生的间歇运动再次进行分流,一部分传递到主传输链轮7,带动载枣模具做间歇式运动,完成红枣的输送;另一部分传递到刀槽式转盘5,完成红枣的切片作业。

1. 曲柄滑块机构 2. 减速器 3. 电机 4. 带传动机构 5. 刀槽式转盘 6. 槽轮机构 7. 主传输链轮
图2 传动系统方案
Figure 2 The plan of transmission system
图2的传动系统包含了2次分流传动,第1次是由带传动机构4完成,将减速器2产生的连续运动分给棘轮机构6和曲柄滑块机构1。第2次是槽轮机构6产生的间歇运动分别传递给主链轮7和刀槽式转盘5。这样设计传动系统的原因在于设计的红枣去核机主运动有2种:负责输送红枣的主链轮7和负责切片的刀槽式转盘5需要完成间歇运动,而负责驱动上料杆和去核杆的曲柄滑块机构1需要完成连续的圆周运动。但是电机通过减速器产生的只是连续运动,因此需要进行2次分流,从而实现连续运动与间歇运动的分离。
3 槽轮机构的设计与分析
槽轮机构又称马尔他机构、日内瓦机构,能将主动轴的匀速连续转动转换成从动轴的单向间歇转动。为了保证槽轮停歇,可在转臂上固接一缺口圆盘,其圆周边与槽轮上的凹周边相匹配。这样既不影响转臂转动,又能锁住槽轮不动。为了避免刚性冲击,圆柱销应切向进、出槽轮,即径向槽与转臂在此瞬间位置要互相垂直。有不同停歇要求时,可采用多臂的和非对称槽轮机构。槽轮机构一般应用在转速不高、要求间歇的转过一定角度的分度装置中,红枣去核机的传动系统中最关键部分就是槽轮机构[9]。
3.1 槽轮机构的运动特性
图3是常见的外啮合槽轮机构。对于外啮合槽轮机构,带圆柱销的主动件O1A做匀速连续转动,从图示位置开始,O1A转动2φ10角时,槽轮反向转动2φ20角。当O1A继续旋转,与O1A固联的凸锁止弧与槽轮的凹锁止弧配合,防止槽轮转动。因此当主动件连续转动时,从动槽轮做周期性间歇转动。
槽轮机构的运动特性一般用运动系数τ表示,槽轮的运动系数τ指的是槽轮每次转动的时间td与周期T之比,即:

(1)
对于外啮合单销槽轮机构,拨盘做匀速圆周运动,所以槽轮每次转动的时间td与周期T的比值可以表示为槽轮与拨盘回转一周的转角的比值。对于图3所示外啮合槽轮机构,则有:

(2)
为了避免拨盘上的销与槽轮上的径向槽发生刚性冲击,销刚刚进入或者退出径向槽时,其线速度应沿着径向槽的中心线方向,所以由图3可知:

图3 外啮合槽轮机构
2φ10=π-2φ20。
(3)
根据φ20与φ10之间的关系,有:

(4)
假设槽轮机构上的均布径向槽的个数为z,则有:

(5)
可得出运动系数τ与槽数z之间的关系:
(6)
由式(6)可知,只有槽数z≥3时,运动系数τ才大于0,而且运动系数τ总是小于0.5,表示槽轮的转动时间总是小于其静止时间。
拨盘上的圆销绕拨盘中心回转,其转动半径R1是不变的,但是在回转的过程中,圆销中心与槽轮回转中心的距离(记为d)是时刻变化的,R1和d满足:
R1cosφ10+dcosφ20=a,
(7)
R1sinφ10=dsinφ20。
(8)
消去d可得:
(9)

(10)
对φ20求导得:
(11)

(12)
式中:
ω1、ω2——分别为拨盘和槽轮的角速度,(°)/s;
α1、α2——分别为拨盘和槽轮的角加速度,(°)/s2。

(13)

(14)


(15)
(16)
ω1为常数,λ=R1/d=sinφ20=sin(π/z)的值随槽数z的变化而变化,由ω2和α2的表达式可知槽轮的角速度和角加速度的最大值随着槽数z的增大而减小。
3.2 基于Pro/E的槽轮机构建模
对于外啮合槽轮机构,最关键的3个参数分别是:槽数z、中心距a、圆销半径r[10]。图4是外啮合槽轮机构在圆销刚刚进入或者退出槽轮时刻的结构简图。
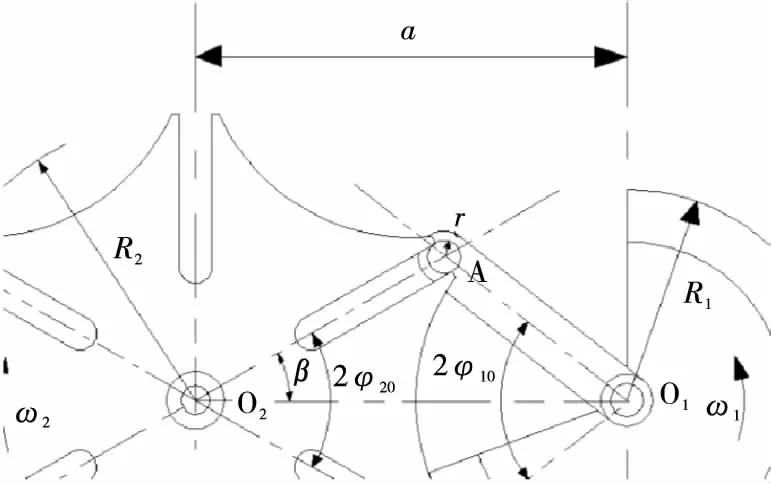
R1. 拨盘上圆销的中心半径β. 槽间角的一半a. 中心距r. 圆销半径
图4 外啮合槽轮机构简图
Figure 4 Brief figure of External gear Geneva mechanism
方案中的红枣去核机有以下参数要求:
(1) 枣核直径3~5 mm,冲针中心偏离红枣中心不能超过3 mm,否则就会造成去核失败。
(2) 红枣直径为15~25 mm,而枣核直径只有3~5 mm,冲针直径不能超过8 mm,否则虽然能完成去核,但是却浪费了较多的果肉,效果就会大打折扣。
(3) 红枣长度为20~35 mm,考虑到红枣的长度以及冲针的初始位置和红枣的距离,初步确定冲针的去核行程(单程)为70 mm。
(4) 电源为380 V,总功率为1.5 kW,红枣去核能力600个/min。
(5) 去核机整体尺寸为:长2 500 mm,宽1 120 mm,高1 500 mm。
考虑到红枣去核机内安装空间的要求,中心距不能超过500 mm,不能小于200 mm,选取中心距a=300 mm,r=20 mm。当中心距一定时,槽数越大,槽轮的尺寸就会越大,而且实验证明,当槽数>9时,槽数的增加不会引起槽轮运动系数τ的明显变化,所以在空间允许的范围内选取尽量大的槽数为z=6,则β=π/z=30°,可求得:
R1=asinβ=150 mm;

对于外啮合槽轮机构有:锁止弧半径Rx<(R1-r)=130 mm,槽轮槽深h≥a(λ+cosβ-1)+r=129.8 mm。选取合适的锁止弧半径Rx=125 mm,槽轮槽深h=140 mm。
根据以上槽轮参数在Pro/E中建立槽轮机构的三维模型:
(1) 进入草绘截面,绘制如图5所示圆,注意直径参数设为R2的2倍。

图5 槽轮外圆草绘图
然后对草绘的槽轮外圆进行拉伸,厚度为50 mm。在原草绘平面新建一草绘,绘制锁止弧的圆轨迹[11],中心距为300 mm,直径为250 mm。锁止弧的圆轨迹见图6。

图6 锁止弧的圆轨迹
拉伸切除,切除深度50 mm,并以中心轴线为基准对切除实体进行阵列,阵列数为6。同样的步骤,在初始平面草绘出槽的形状,拉伸切除50 mm,以中心轴为基准阵列后得到槽轮的三维模型图见图7。
3.3 槽轮机构的运动仿真
在Pro/E中建立组件,首先固定2个轴,距离300 mm,然后在组件中添加槽轮和拨盘,2个零件都以销钉连接的方式与固定轴装配,见图8。

图7 槽轮机构的三维模型
然后添加2个凸轮约束,第1个凸轮约束:凸轮1的主体选择圆销的侧圆柱面,凸轮2的主体选择槽轮的整个圆周面;第2个凸轮约束:凸轮1的主体是拨盘的锁止圆弧面,凸轮2的主体是槽轮与锁止弧相切的圆周面[12-13]。

图8 槽轮机构装配图
最后在拨盘的中心轴添加一个伺服电机,使整个机构产生一个动力,运行机构运动分析,会产生模拟的运动过程,保存运动结果[14],进行分析得到槽轮得角速度和角加速度随时间变化的曲线,见图9。

图9 槽轮主轴的角速度和角加速度仿真结果
Figure 9 The simulation results of principle axis angular speed and principle axis angular acceleration
根据仿真结果可以看出,拨盘每转1圈,槽轮主轴的角速度会达到一次峰值,圆销越接近槽轮中心,角速度越接近峰值;圆销从逐渐接近槽轮中心到逐渐远离槽轮中心的过程中,槽轮主轴的角加速度先是达到一次峰值,然后迅速下降,并完成一次变向,然后反向达到角加速度峰值。说明槽轮机构在运动过程中存在柔性冲击,可能会导致红枣去核机产生不稳定的震动,从而影响去核的效果,所以需要对红枣去核机进行震动特性分析,并设计相应的机构降低震动造成的影响,保证去核的效率和质量。
4 结语
根据红枣去核机的性能要求设计了整机方案,并针对整机方案确定了传动系统的方案,传动系统的关键机构是产生间歇运动的槽轮机构[15],本研究对槽轮机构进行了参数设计和运动学仿真,可以看出槽轮机构的仿真结果与实际相符,Pro/E的仿真结果对实际工程设计具有参考意义。
[1] 曹有福, 李树君, 赵凤敏, 等. 我国红枣开发加工现状、问题及对策[J]. 包装与食品机械, 2009(4): 46-49.
[2] 闫忠心, 鲁周民, 刘坤, 等. 我国红枣资源加工利用研究现状与展望[J]. 西北农林科技大学学报: 自然科学版, 2010(6): 102-108.
[3] 宁天德. 半自动硬枣去核划皮机: 中国, 01229251.6[P]. 2001-06-28.
[4] 彭三河. 大枣去核装置的设计[J]. 包装与食品机械, 2005(4): 21-22.
[5] 刘振省. 新型全自动红枣去核机: 中国, 201020249547.2[P]. 2011-01-12.
[6] 安锋利. 红枣产品的开发利用[J]. 北方园艺, 2010(10): 235-236.
[7] 张雪松. 连续式红枣去核机设计[J]. 食品工业, 2013(11): 192-194.
[8] 吕长安. 大枣自动定向、输送及切片机的研究设计[D]. 兰州: 甘肃农业大学, 2010: 52-55.
[9] 刘辰. 外槽轮机构设计分析[J]. 机电工程技术, 2009(2): 61-63.
[10] 成大先. 机械设计手册[M]. 北京: 化学工业出版社, 2004: 236-237.
[11] 马成习. 基于Pro/E的包机槽轮机构建模及运动仿真[J]. 包装工程, 2008(2): 36-37, 40.
[12] 袁东阁. 红枣自动去核机的设计与技术研究[D]. 泰安: 山东农业大学, 2014: 44-47.
[13] 杨玉萍, 季彬彬. 同步带传动中张紧轮安装位置的优化设计[J]. 南通大学学报: 自然科学版, 2010(1): 68-70.
[14] 张明辉, 万全喜, 吴家龙. 基于Matlab与Solidworks方法的风力机叶片优化设计[J]. 流体机械, 2012(11): 41-45, 65.
[15] 姚兆祯, 张丽艳, 李辉, 等. 基于ANSYS的AP1000安注箱壳体强度可靠性分析[J]. 压力容器, 2016(2): 61-66.
Design of thered jujube pitting machine and simulation analysis on Geneva mechanism
CAOJin-cao
HUANGXiao-hua
SHIZheng-yuan
HUANGYa-wei
QIHe-nan
(NanjingUniversityofScienceandTechnology,Jiangsu,Nanjing210094,China)
Red jujube pitting machine is an automatic equipment which can pit abundant red jujube quickly. A type of red jujube pitting machine was designed in this study, this type of pitting machine could realize such functions: loading material, location, transportation, pitting, slicing and falling the material, and finally produced edible red jujube sheet. This study had designed the transmission system of the red jujube, and had analyzed the kinematics of the Geneva mechanism in the Pro/E, and improved the motion performance of the Geneva mechanism.
Red jujube pitting machine; transmission system; Geneva mechanism; kinematics
曹劲草,男,南京理工大学在读硕士研究生。
黄晓华(1969—),男,南京理工大学副教授,博士。 E-mail:34420969@qq.com
2017—03—18
10.13652/j.issn.1003-5788.2017.07.017
