一种测试星敏感器空间指向的方法
2017-09-20,
,
(上海航天控制技术研究所,上海 201109)
一种测试星敏感器空间指向的方法
张召弟,王向
(上海航天控制技术研究所,上海201109)
星敏感器作为高精度姿态测量单机,为高精度姿态控制提供前提保障。确保星敏感器空间指向正确性对姿控系统至关重要。基于此提出了一种在外场观星试验中,通过测试星敏感器地方时惯性指向来确认空间指向的方法,该方法结合格林尼治恒星时概念,通过地心赤道惯性坐标系与当地地理系之间的转换关系进行算法设计,是验证选用的星敏感器空间指向正确与否的重要手段。
星敏感器;地方时;惯性指向
0 引言
航天器姿态确定技术在航天器姿态控制、空间遥感定位等领域中起着重要作用。基于星敏感器的姿态确定技术,由于其可靠、快速和高精度等特点,在航天器姿态控制应用方面具有很大优势[1]。姿态测量是卫星姿态确定和姿态控制的基础。星敏感器是一种高精度的姿态测量系统,一般来说在姿态敏感器中最为精确,其精度比太阳敏感器高1个数量级,比红外地平仪高2个数量级。它以天空中的亮度高于+2可见星等的恒星为参照物[2],通过探测天球上不同位置的恒星来确定卫星的当前姿态。星敏感器作为高精度姿态测量单机,已被广泛选用于各种航天器中,为高精度姿态确定和控制提供前提保障。因此在使用前对星敏感器多方面进行充分测试至关重要。通常的测试方法[3-7]有:通过绕星敏感器3个轴分别旋转,作为测试星敏感器的相对极性的常用手段;通过将星敏感器静止放置于平台上,采集一段时间星敏感器的数据,结合地速引入考核星敏感器的外场观星静态精度;通过引入轨道和姿态参数设置光星模模拟真实星空,测试星敏感器的静态精度和全天区动态跟踪性能,该方法的缺点在于光星模价格昂贵,且光星模参数(视场、口径等)不可调,很难与星敏感器完全匹配;通过对卫星运动轨道和姿态参数及星敏感器的姿态参数进行仿真计算、模拟生成星敏感器在轨状态下的仿真星图,星敏感器以此仿真星图作为测试信号源,通过对仿真星图的处理,实现对星点定位、星图识别、姿态计算等功能的全面测试,该方法的缺点在于只能对星敏感器电子部件的功能进行有效验证,无法对光学部件的功能进行验证;通过将星敏感器接入半物理仿真系统测试其极性和短期静态性能等。本文提出的这种方法通过测试星敏感器地方时惯性指向,是验证选用的星敏感器空间绝对指向正确与否的重要手段。
1 技术参数
(1)星敏感器单机坐标系[8]定义如图1所示。

图1 星敏感器坐标系示意图Fig.1 The scheme of star sensor coordinate system
原点:CCD中心;Xs:沿着CCD行的方向;Ys:沿着CCD列的方向;Zs:沿着星敏感器的光轴方向。
(2)地心惯性坐标系[9](J2000系)OiXiYiZi
Oi—地球质心;
OiXi—指向J2000.0平春分点;
OiZi—与OiXi垂直,沿地球自转轴指向北方;
OiYi—在平赤道平面内,与另两轴构成右旋正交系。
(3)地理坐标系[10](南东天配置)
Oe—取在运动体M和地球中心连线与地球表面交点;
OeXe—在当地水平面内指南;
OeYe—在当地水平面内指东;
OeZe—沿当地地垂线方向并指向天顶,与OeXe、OeYe组成右手坐标系;
地理坐标系也可以有其他不同的配置顺序,如东北天等。
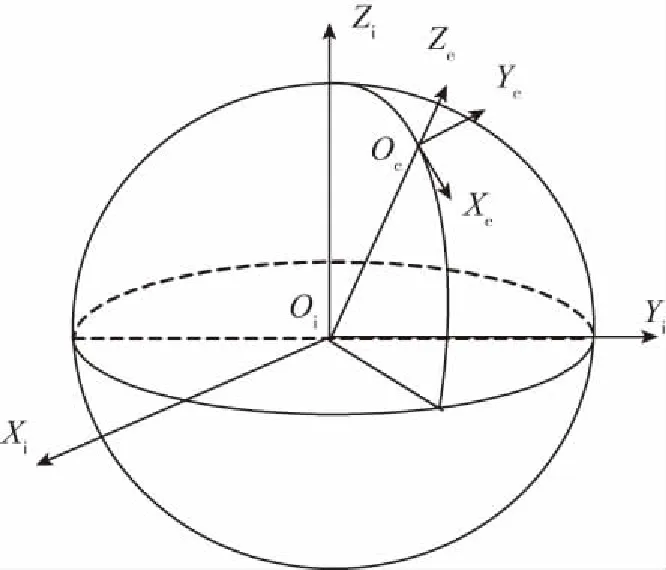
图2 地心惯性坐标系及地理坐标系示意图Fig.2 The scheme of Inertial coordinate system and geographical coordinate system
2 测试方法设计
2.1 测试方法
将星敏感器的Z轴指向天空,X轴依次指向东/南/西/北放置在水平台面上。通过稳压源给星敏感器供电,通过串口调试助手给星敏感器发送指令数据,通过显示读取软件观察并记录星敏感器输出的四元数,待每次放置在某个位置稳定输出后,再开始记录星敏感器输出的四元数及时间。测试连接示意图如图3所示。

图3 测试连接示意图Fig.3 The scheme of test connection
2.2 数据处理
以公元前4713年1月1日格林尼治平午为起算日期[11],T0时刻对应的儒略日为

式中,Year,month,day,hour_UTC,minute,second对应于T0时刻的年月日时分秒,其中hour_UTC为UTC时。
以历元J2000.0为起算日期的儒略日为
J2000_days_S=JD_S-2451545
T0时刻的格林尼治恒星时(单位:°)为
取参考时刻点T0,提前计算好T0时刻对应的Sg0,则上海地区晚T时地方恒星时可表示为
Sg=Sg0+121.409151°+(T-T0)×15(°)/h
(3)
其中,Sg0为当天某参考点T0时的格林尼治恒星时,试验前可提前计算。
上海经度(J2000系)为
λ=Sg
(4)
上海纬度(J2000系)为
δ=31.1731026°
(5)
J2000坐标系初始四元数可表示为
(6)
J2000坐标系经过绕Z轴旋转λ,再绕Y轴旋转(90°-δ),可与南东天配置的当地地理坐标系坐标轴重合,如图4所示。
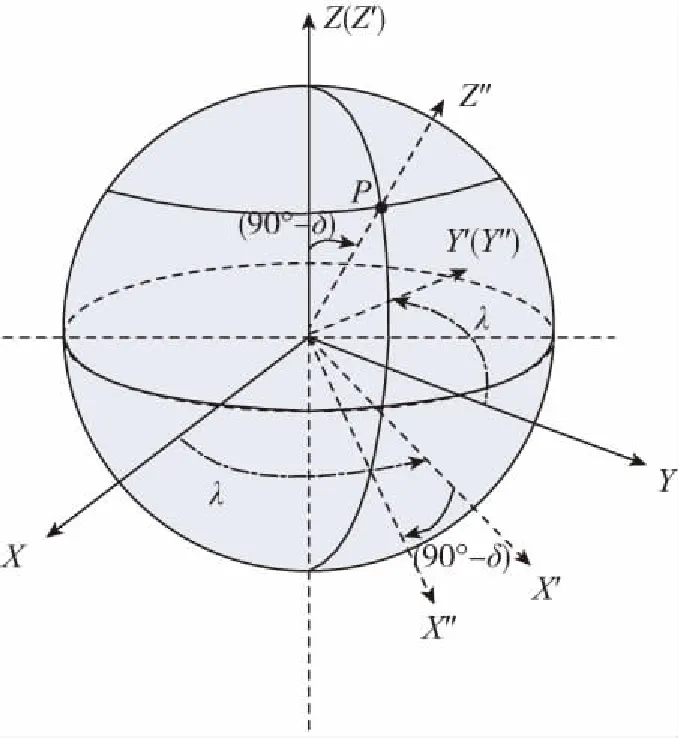
图4 J2000系到地理坐标系(南东天配置)转换关系Fig.4 The transformation scheme of J2000 inertial coordinate system and geographical coordinate system
J2000坐标系到当地地理系合成转动四元数为
星敏感器光轴指天的光轴矢量在当地地理系可表示为
(8)
结合捷联矩阵(动系到静系转换矩阵)用四元数的表达式[12]
(9)
可得当地地理系光轴矢量在惯性系坐标表示为
(10)
其中,QEi=[q0,q1,q2,q3]T。
同理,结合捷联矩阵用四元数的表达式,可得本体系光轴矢量在惯性系坐标表示为
(11)

则星敏感器光轴夹角误差可表示为

(12)
考虑到星敏感器放置平台的不平整性等因素,若星敏感器光轴夹角误差Δψ较小(设置阈值<10°),则可验证地方时惯性指向正确,否则地方时惯性指向有误。
另外,按312旋转顺序得到的捷联矩阵(动系到静系转换矩阵)用姿态角表示[12]为

(13)
因此可以求得姿态角与四元数的关系为
(14)

3 外场观星数据分析与验证
为了验证本文提出测试方法的实用性和正确性,基于上述分析与推导结果进行外场观星算例验证。
1)将星敏感器的Z轴指天,X轴指向地理系东向放置于水平台面上,当晚19点40分输出的一组实测四元数为
经计算,此时的QEi值如下
进一步计算星敏感器光轴夹角误差为
Δα=2.429°
求得三轴姿态误差角(单位:°)为

2)将星敏感器的Z轴指天,X轴指向地理系南向放置于水平台面上,当晚19点41分输出的一组实测四元数为
经计算,此时的QEi值如下
进一步计算星敏感器光轴夹角误差为
Δα=0.8134°
求得三轴姿态误差角(单位:°)为

3)将星敏感器的Z轴指天,X轴指向地理系西向放置于水平台面上,当晚19点42分输出的一组实测四元数为
经计算,此时的QEi值如下
进一步计算星敏感器光轴夹角误差为
Δα=0.2688°

经计算,此时的QEi值如下
进一步计算星敏感器光轴夹角误差为
Δα=0.2676°
求得三轴姿态误差角(单位:°)为

5) 将星敏感器的Z轴指天,X轴指向地理系北向放置于水平台面上,保持在此状态下记录半小时星敏感器输出的四元数数据,并按上述方法对实测数据进行处理,得到此状态下星敏感器光轴夹角误差曲线如图5所示。

图5 星敏感器光轴夹角误差曲线Fig.5 The curve of the optical axis error angle of the star sensor
结果表明,该方法在外场观星试验中操作简单可行,结合格林尼治恒星时概念,通过地心赤道惯性坐标系与当地地理系之间的转换关系,验证了星敏感器地方时惯性指向的正确性。
4 结束语
本文设计的方法作为一种测试星敏感器空间惯性指向的验证方法,能够从实用角度上在外场观星即可考核到星敏感器的空间指向性能,且利用该种方法星敏感器观测的是真实星空,考核的是星敏感器的绝对空间指向。从外场观星的数据处理结果可以看出,该方法简单实用,具有工程应用价值。
[1] 陶雨露.基于恒星的航天器姿态确定技术研究[D].长沙:国防科学技术大学,2012.
[2] 黄圳圭.航天器姿态动力学[M].长沙:国防科技大学出版社,1997:87-90.
[3] Tian H, Yuan J, Li Z, et al.Analysis for the ground observing data of star sensor[J].Opto-Electronic Engineering, 2001, 28(5): 1-4.
[4] Li C, Li H.Astronomical calibration method and observation analysis for high-accuracy star sensor [J].Optics and Precision Engineering, 2006, 14(4):558-563.
[5] Xing F, Wu Y, Dong Y, et al.Research of laboratory test system for micro star tracker[J].Optical Technique, 2004, 30(6):703-709.
[6] Gong Y, Hu Y, Zhao Y.Design of a mini star simulator based on digital optical processing [J].Optics and Precision Engineering, 2007, 15(11):1698-1703.
[7] 魏新国, 张广军, 樊巧云,等.利用仿真星图的星敏感器地面功能测试方法[J].红外与激光工程, 2008, 37(6):1087-1091.
[8] Ground Support Equipment User & Handling Manual [Z].Jena:JENA-OPTRONIK ,2008: 28-30.
[9] 刘暾,赵钧.空间飞行器动力学[M].哈尔滨:哈尔滨工业大学出版社,2007:153-154.
[10] 邓正隆.惯性技术[M].哈尔滨:哈尔滨工业大学出版社,2006:6-7.
[11] 王威,郗晓宁.近地航天器轨道基础[M].长沙:国防科技大学出版社,2003:54-66.
[12] 刘良栋.卫星控制系统仿真技术[M].北京:中国宇航出版社,2003:248-253.
AMethodofTestingtheSpacePointingofStarSensor
ZHANGZhao-di,WANGXiang
(ShanghaiAerospaceControlTechnologyInstitute,Shanghai201109,China)
The star sensor acts as a high-precision attitude measure equipment, which provides a guarantee for high-precision attitude control.Ensuring the correction of the star sensor space orientation is crucial to the attitude control system.Based on this, this paper puts forward a method of confirming space pointing by testing the local time inertial orientation of the star sensor in real space experiments.Combined with the concept of the Greenwich sidereal time, the method is designed using the conversion through the geocentric equatorial inertial coordinate and the local geographic coordinate, and it is an important means to verify the correction of selected the star sensor space pointing.
Star senor; Local time; Inertial pointing
2017-05-17;
:2017-06-13
:张召弟(1985-),女,工程师,主要从事卫星姿态控制研究工作。E-mail:zhaodizhaodi@126.com。
10.19306/j.cnki.2095-8110.2017.05.012
V448.2
:A
:2095-8110(2017)05-0070-05
