滚珠丝杠舵机传动机构形式分析研究
2017-09-20,,
, ,
(北京自动化控制设备研究所,北京 100074)
滚珠丝杠舵机传动机构形式分析研究
段小帅,黄建,刘海
(北京自动化控制设备研究所,北京100074)
针对滚珠丝杠舵机常用的曲柄滑块和拨叉两种传动机构形式,对舵机的减速比和间隙特性进行对比分析研究。拨叉舵机的减速比波动较小,在0°时为最小值,两边呈现对称状态,而曲柄滑块舵机的减速比为不对称状态。曲柄滑块舵机比拨叉舵机产生间隙的环节较多,但间隙易于控制,而拨叉舵机由于结构磨损产生的间隙增大现象较为明显。
舵机;滚珠丝杠;传动机构
0 引言
舵机是导弹等飞行器制导控制系统的执行机构,常用的传动机构形式有齿轮齿条、蜗轮蜗杆、谐波减速器、滚珠丝杠等[1-5]。其中滚珠丝杠由于效率高、刚度大、结构紧凑、传动精度高等优点,被越来越多地应用于舵机传动机构中[6-9]。
为了实现减速及伺服运动,舵机的减速比为首要考虑的性能参数[10]。而在工作过程中,舵机的间隙会直接影响其控制精度及稳定性[11]。目前有相关文献对拨叉式滚珠丝杠舵机的减速比和间隙进行分析[12],而对于常用的曲柄滑块式滚珠丝杠舵机的研究较少。本文针对这两种传动机构形式,重点对舵机的减速比和间隙进行对比分析研究,为滚珠丝杠舵机的优化设计及制造使用提供理论依据。
1 减速比分析
1.1 曲柄滑块舵机减速比
曲柄滑块舵机的传动机构如图1所示,在滚珠丝杠的输入端,由电机通过齿轮驱动滚珠丝杠旋转运动;在滚珠丝杠的输出端,丝杠螺母往复运动,由曲柄滑块机构驱动舵面进行偏转。对曲柄滑块机构的运动学关系进行建模,如图2所示。
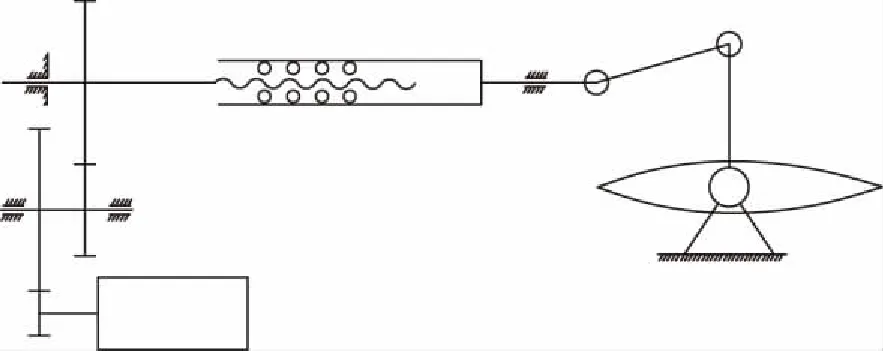
图1 曲柄滑块舵机传动机构示意图Fig.1 The transmission scheme of crank-slider actuator

图2 曲柄滑块机构运动模型Fig.2 The model of crank-slider mechanism
图2中,C点只能水平方向前后运动,B点只能绕O点旋转运动,旋转半径为R,假定初始角为α,各点坐标为:O(0,0),B(Rsinα,Rcosα),C(m,n)。
设B点的角度变化量为Δα,C点的位移变化量为Δm,此时B点与C点坐标为:B′(Rsin(α+Δα),Rcos(α+Δα)),C′(m+Δm,n)。
由于B点与C点的距离为连杆的长度,在运动过程中刚体尺寸不发生变化,即

根据几何关系可以得到:
(1)
由式(1)可以得到:
(2)
由式(2)可以得到Δm的表达式为
Δm=Rsin(α+Δα)-Rsinα+

(3)
设前级齿轮系传动比为ia,滚珠丝杠导程为p,电机运动角度为Δθ,则有

(4)
联立式(3)和式(4)可以得到舵机总传动比i为


(5)
根据式(5)即可计算出舵机在任意角度的传动比。
假定滚珠丝杠导程为5mm,齿轮系减速比为2,摇臂长为90mm,丝杠轴线中心距为50mm,连杆长为80mm,在-30°~+30°范围内曲柄滑块舵机的减速比如图3所示。

图3 曲柄滑块舵机减速比Fig.3 The speed-down ratio of crank-slider actuator
1.2 拨叉舵机减速比
拨叉舵机的传动机构如图4所示,滚珠丝杠的输入端与曲柄滑块舵机相同,在滚珠丝杠的输出端,丝杠螺母往复运动,通过螺母上的销轴和拨叉上的滑槽结构驱动舵面进行偏转。对拨叉机构的运动学关系进行建模,如图5所示。

图4 拨叉舵机传动机构示意图Fig.4 The transmission scheme of shifting fork actuator

图5 拨叉机构运动模型Fig.5 The model of shifting fork mechanism
图5中,C点在水平方向前后运动,距离O点最短距离为R,C点与O点的角度为α。
设C点的角度变化量为Δα,位移变化量为Δs,根据几何关系可以得到:

(6)
则有
Δs=Rtan(α+Δα)-Rtanα
(7)
同样设前级齿轮系传动比为ia,滚珠丝杠导程为p,电机运动角度为Δθ,则有
(8)
联立式(7)和式(8)可以得到舵机总传动比i为
(9)
根据式(9)即可计算出舵机在任意角度的传动比。
假定滚珠丝杠导程为5mm,齿轮系减速比为2,摇臂长为90mm,在-30°~+30°范围内拨叉舵机的减速比如图6所示。

图6 拨叉舵机减速比Fig.6 The speed-down ratio of shifting fork actuator
1.3 减速比分析小结
在相同的输入条件下,曲柄滑块舵机的减速比为155~250,以平均值为参照点,其减速比变化范围为23.5%;而拨叉舵机的减速比为225~300,减速比变化范围为14.3%,因此拨叉舵机的减速比波动较小。另外通过图3与图6对比可以看出,拨叉舵机的减速比在0°时最小,两边呈现对称状态,而曲柄滑块舵机的减速比最大值不在0°,两边为不对称状态。
2 间隙分析
2.1 间隙计算原理
舵机传动机构的间隙主要来源于铰链处的圆柱体结构在受力状态下产生的间隙,对圆柱体的接触状态进行建模分析,如图7所示。
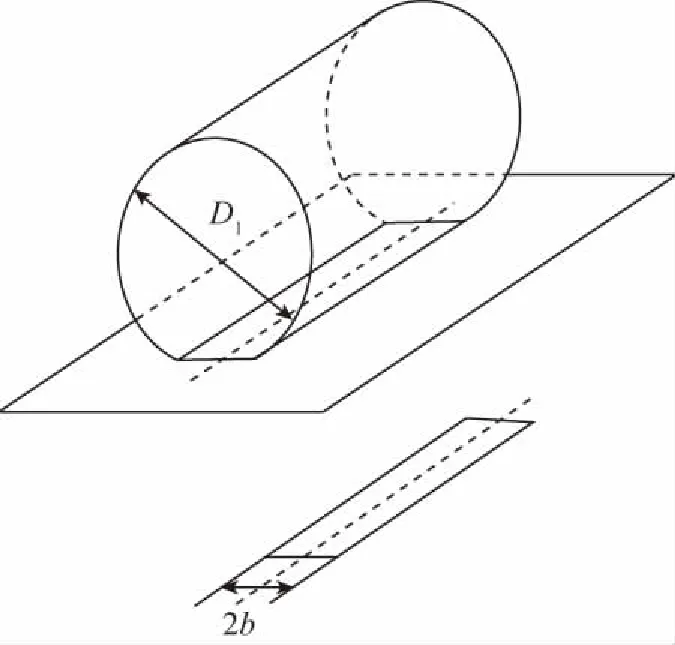
图7 柱面接触示意图Fig.7 The scheme of contact surface
在接触面上,接触变形宽度为2b,有
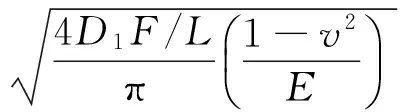
(10)
其中:v为材料的泊松比;E为材料的弹性模量;F/L为作用在圆柱体单位长度上的法向力。
由式(10)可知间隙量为


(11)
某型舵机传动机构铰链处的圆柱销直径为10mm,长度为20mm,法向受力为20kN,材料的泊松比为0.3,弹性模量为2.1×105MPa,则该圆柱销在受力状态下产生的间隙量为0.012mm。
2.2 舵机间隙
曲柄滑块舵机传动机构的间隙主要由ABCDEO6个环节组成,如图8所示。其中A点为滚珠丝杠轴承的间隙,在对轴承预紧的条件下,该处间隙可以忽略不计;B点为丝杆与螺母之间的间隙,在对滚珠丝杠预紧的条件下,该处间隙可以忽略不计;C点为滑动支撑的间隙,由于该处受力较小,产生的间隙较小;O点为输出轴安装连接产生的间隙,可以通过锥销连接或一体化设计,使该处间隙忽略不计;D点和E点为铰链在受力状态下产生的间隙,该处为传动机构间隙的主要来源。针对2.1节所述某型舵机,两处的间隙总量折算到舵机输出值上小于0.03°,能够满足系统总体不大于0.1°的使用要求。

图8 曲柄滑块舵机间隙组成Fig.8 The clearance component of crank-slider actuator
拨叉舵机传动机构的间隙主要由ABCO4个环节组成,如图9所示。其中A点、B点和O点的间隙分析同曲柄滑块舵机;C点为销轴和滑槽产生的间隙。以某型舵机为例,其理论设计状态下间隙为0.04°,能够满足系统总体不大于0.1°的使用要求。
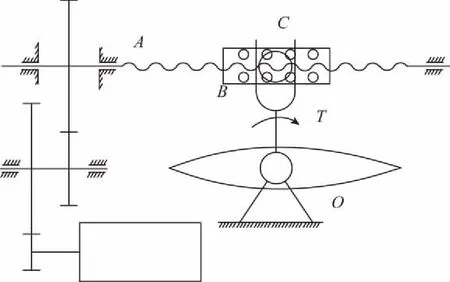
图9 拨叉舵机间隙组成Fig.9 The clearance component of shifting fork actuator
通过两种舵机对比可以看出,曲柄滑块舵机比拨叉舵机产生间隙的环节较多,但通过设计和装配手段,能够使传动机构的总间隙控制在系统要求的范围内。但在实际使用过程中,拨叉舵机的销轴和滑槽长期处于大负荷滑动摩擦状态,此处由于结构磨损产生的间隙会明显增大,需要从设计和制造上对该处结构进行优化。
3 结论
本文针对曲柄滑块形式和拨叉形式的滚珠丝杠舵机,提出了理论推导、仿真分析与工程经验相结合的方法,对传动机构的减速比和间隙进行对比分析研究,总结了两种形式舵机的特性,为滚珠丝杠舵机的设计、制造及使用提供了依据。
[1] 张新华, 黄建, 张兆凯,等.大功率高性能航天伺服系统发展综述[J].导航定位与授时, 2017, 4(1): 14-19.
[2] 刘铭, 黄纯洲, 李勤.飞机机载机电系统多电技术的发展现状[J].航空科学技术, 2005(6):10-13.
[3] Habibi S, Goldenberg A.Design of a new high performance electrohydraulic actuator[C]//Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 1999.IEEE, 2000:227-232.
[4] 黄建国.高超音速飞机的先行者——“X-43A”[J].民用飞机设计与研究, 2001(3):5-7.
[5] Cochoy O, Carl U B, Thielecke F.Integration and control of electromechanical and electrohydraulic actuators in a hybrid primary flight control architecture[C]//International Conference on Recent Advances in Aerospace Actuation Systems and Components.INSA Toulouse, 2007: 1-88.
[6] 肖正义.滚珠丝杠副在航天航空领域的应用[J].制造技术与机床, 2009(4):39-41.
[7] 曹云峰,翁新根,杨巧旭.一种新型电动舵机系统[J].南京航空航天大学学报, 1996, 28(5): 679-682.
[8] 段小帅.一种高功率密度电动舵机的设计[J].导航定位与授时, 2016, 3(1): 36-39.
[9] 陈勇将,汤文成,王洁璐.滚珠丝杠副刚度影响因素及试验研究[J].振动与冲击, 2013,32(11):70-71.
[10] 袁剑锋,张宪民.高速并联机械手驱动系统减速比的优化配置[J].机械工程学报, 2009, 45(2): 255-261.
[11] 张新华,杨瑞峰.含间隙的电动伺服机构非线性振荡[J].振动、测试与诊断, 2013, 33(S2): 131-136.
[12] 张佼龙,周军,周凤岐.滚珠丝杠舵机应用问题研究[J].机械与电子, 2011(10): 15-19.
StudyonTransmissionMechanismofBallScrewActuator
DUANXiao-shuai,HUANGJian,LIUHai
(BeijingInstituteofAutomaticControlEquipment,Beijing100074,China)
Aiming at two common mechanisms of ball screw actuator for crank-slider and shifting fork transmission, the paper gives contrast analysis of the speed-down ratio and system clearance of actuator.In terms of speed-down ratio, the speed-down ratio of shifting fork actuator fluctuates less, which becomes the minimum and symmetric at0°.While crank-slider actuator’s speed-down ratio doesn’t have symmetry characteristic.Compared with shifting fork actuator, crank-slider actuator has more points contributing to system clearance, but it could be controlled easily.However, because of mechanic structure wear, the system clearance of shifting fork actuator increases more obviously.
Actuator; Ball screw; Transmission mechanism
2017-02-19;
:2017-03-07
:国家自然科学青年基金(61603051)
:段小帅(1985-),男,硕士,工程师,主要从事伺服系统方面的研究。
10.19306/j.cnki.2095-8110.2017.05.006
TH132
:A
:2095-8110(2017)05-0039-04
