一种改进型广义预测控制系统研究及工程应用
2017-09-19李泉尹峰孙坚栋罗志浩
李泉,尹峰,孙坚栋,罗志浩
(国网浙江省电力公司电力科学研究院,杭州310014)
发电技术
一种改进型广义预测控制系统研究及工程应用
李泉,尹峰,孙坚栋,罗志浩
(国网浙江省电力公司电力科学研究院,杭州310014)
常规的广义预测控制算法在对象模型已知时,通过求解丢番图方程获得最优控制律,但是对模型精确度要求较高,不能适应工程需要,因此,提出一种改进型广义预测控制系统,当已知模型的参数变化时仍具有良好的控制性能。为了提高系统克服外扰的能力,还设计了扰动通道算法,形成带扰动模型的广义预测控制系统,将该系统应用于某600 MW超临界机组的脱硝控制系统中,通过建立系统对象模型和扰动模型来预测被控对象未来的变化趋势,当对象模型发生变化时,系统仍具有较强的鲁棒性。
广义预测;鲁棒;扰动;脱硝控制;模型
0 引言
广义预测控制是80年代产生的一种新型计算机控制方法,是预测控制中最具代表性的算法之一。它基于传统的参数模型,模型参数少,通过求解丢番图方程获得最优控制律,但是当对象模型已知时,常规的广义预测算法获得的最优控制律对模型精确度要求较高,不能适应工程要求;通过在线辨识的方法计算广义预测最优控制律时对模型精度要求也很高,由于火电机组工程现场噪声较多,在线辨识时会出现各种复杂的问题较难解决。在此提出一种鲁棒广义预测控制系统,当模型参数变化时仍能获得良好的控制性能,并且设计了扰动通道算法,形成带扰动模型的广义预测控制系统。将该系统应用于某600 MW超临界机组脱硝控制系统中,工程实践证明该算法具有较强的优越性和实用价值。
1 广义预测控制基本方法
被控对象的数学模型采用离散差分方程描述,如式(1)所示。

式中:A(z-1),B(z-1),C(z-1)是后移算子z-1的多项式。
{u(t)}和{y(t)}分别表示被控对象的输入和输出,Δ=1-z-1表示差分算子。为推导简便起见,令C(z-1)=1。
广义预测的任务是使被控对象的输出y(t+j)尽可能地接近设定值yr(t+j),j=1,2,…。
性能指标函数如式(2)所示:

式中:N0是最小预测时域;N1是最大预测时域;Nu是控制时域。
利用Diophantine方程:式(3),式(4),得到j步后输出y(t+j)的最优预测值。

其中j=1,…,N1,且

由式(1),(3),(4)可得:

由于Ejω(t+j)均是t时刻后的白噪声,则t+j时刻y(t+j)的最优预测值可表示为:

将(5)式写成向量形式如式(6):

其中:


将式(6)代入式(7),使J取最小的控制律为:

将矩阵(GTG+λI)-1GT的第一行记作:

因此广义预测控制律可以写成如式(10)。
广义预测控制的基本算法如下:首先给定预测时域N1,控制时域Nu和加权常数λ;由Diophantine方程求解多项式Ej,Fj,Gj和Hj;计算矩阵G及(GTG+λI)-1;由式(9)和式(10)求解控制量u(t)。
2 改进型广义预测控制系统
理想的广义预测控制系统对模型要求很高,当模型发生微弱变化后,控制性能下降剧烈,理论上采取在线实时辨识的方法,不停地辨识精准的控制模型,但是工程中控制系统的内扰和外扰频繁且变化剧烈,采用在线辨识算法获得的模型与实际模型偏差较大,控制性能很不理想。为此需要提出一种改进型广义预测控制结构,使其能够应用于工程实际。
在此提出了一种改进型广义预测控制结构,当模型参数变化时仍能获得良好的控制性能,采用参考模型进行控制,具体结构如图1所示。
在图1中A表示控制反馈信号,B表示模型校正反馈信号,C表示模型校正系统。广义预测控制算法采用编程实现,控制对象数学模型为参考模型,该控制器与参考模型构成闭环控制系统,将广义预测控制器中的已知模型设置为参考模型,预测控制器的输出同时进入参考模型和实际控制对象,获得偏差校正值后送入广义预测控制系统的输入端,该偏差校正中包含了控制对象与参考模型的模型偏差和控制系统中因扰动信号而产生的偏差,因此该控制结构能够获得满意的控制效果。
为验证该新型控制结构的有效性,将其与常规广义预测控制系统进行仿真对比,常规系统如图2所示。
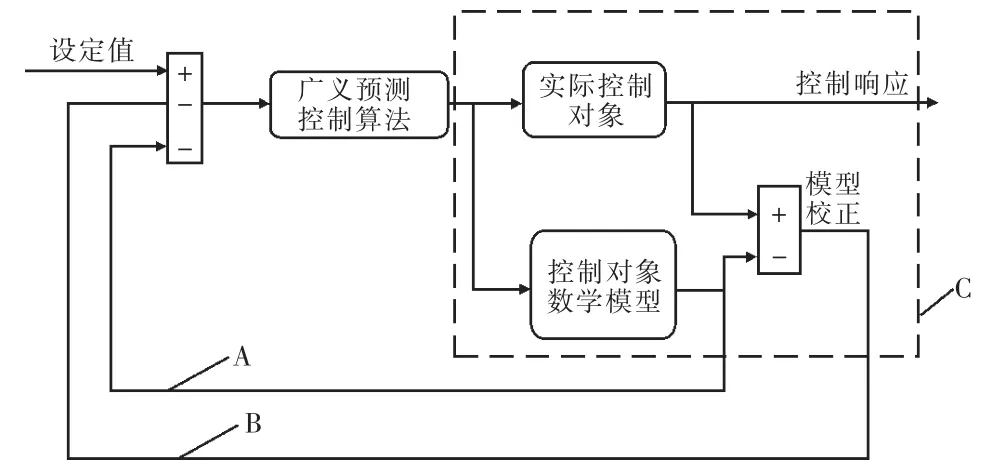
图1 改进型广义预测控制系统结构
在此的控制对象如式(11)所示:

图2 常规广义预测控制系统结构

当控制对象发生变化时,对象模型由式(11)变为式(12)。

在图2中,广义预测控制器内部设置已知数学模型如式(11)所示的G(s),当控制对象也采用模型G(s)时,预测时域设置为120,控制时域设置为5,控制仿真曲线如图3所示。
采用图2所示的控制结构,广义预测控制系统中已知模型采用式(11),对式(12)进行控制,获得的控制曲线如图4所示。
采用图1所示的鲁棒控制系统,当广义预测控制器采用式(11)的内部模型,控制对象采用式(12)的形式,预测时域设置为120,控制时域设置为5,获得的控制曲线如如图5所示。
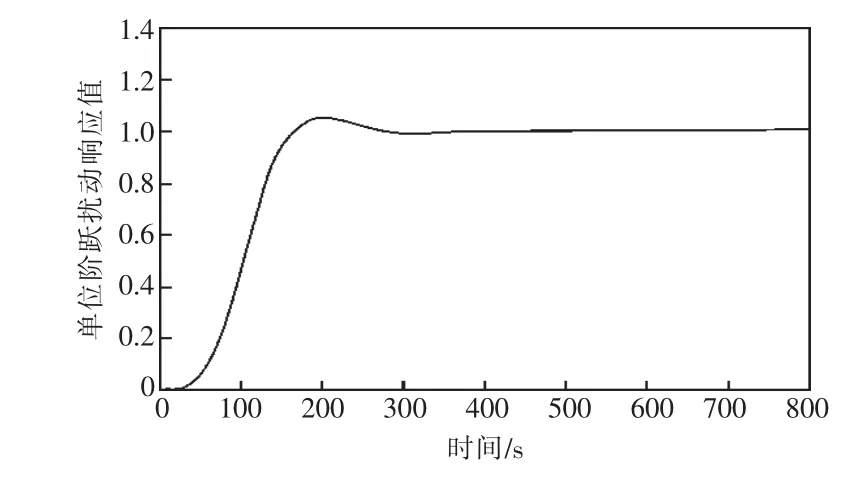
图3 常规广义预测控制仿真曲线1

图4 常规广义预测控制仿真曲线2
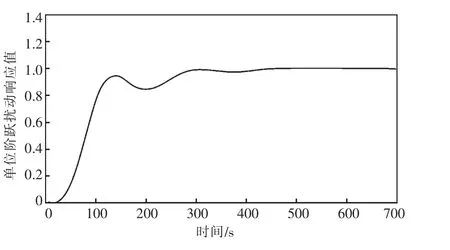
图5 改进型广义预测控制仿真曲线
由图5看出,系统的控制响应曲线不仅稳定而且控制性能的改变微弱,能够满足工程实际的要求,与图4对比,可以看出改进型广义预测控制结构的优越性,具有很强的实用价值。
3 基于扰动模型的广义预测系统设计
采用图1的结构设计广义预测控制系统时,如果被控对象中存在扰动信号,系统会自动克服扰动,但是克服扰动的响应速度存在一定滞后,为了使控制系统能够更好地克服外扰,需要设计基于扰动模型的广义预测控制系统。
对于带有扰动模型的被控对象,需要设计抗扰动控制系统,其结构如图6所示。
在图6中,外扰形成的输出响应RPV和扰动控制器作用形成的输出响应CPV相叠加,获得被控系统输出分量PV1,控制输入CO作用形成的输出分量PV2,PV1和PV2相叠加后形成被控系统总输出PV。扰动控制器的作用就是使RPV和CPV能够相互抵消,PV1接近于0,此时控制系统只需控制对象Gc,能够明显提高系统克服外扰的能力。
根据模型Gc和Gr来推导抗扰动控制算法。
若对象模型为1时,抗扰动控制器Grc=-Gr。若对象模型为一阶惯性加迟延时,分2种情况进行算法设计。
若τc<τr,抗扰动控制器Grc形式见式(13)。

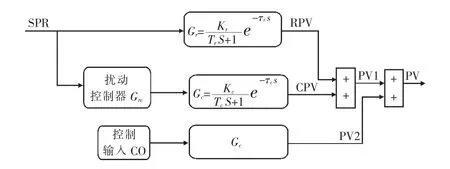
图6 带扰动模型的被控系统
若τc>τr,抗扰动控制器Grc形式见式(14)。

将上述的扰动控制器Grc,加入图1所提出的广义预测工程设计系统中,其结构图如图7所示。
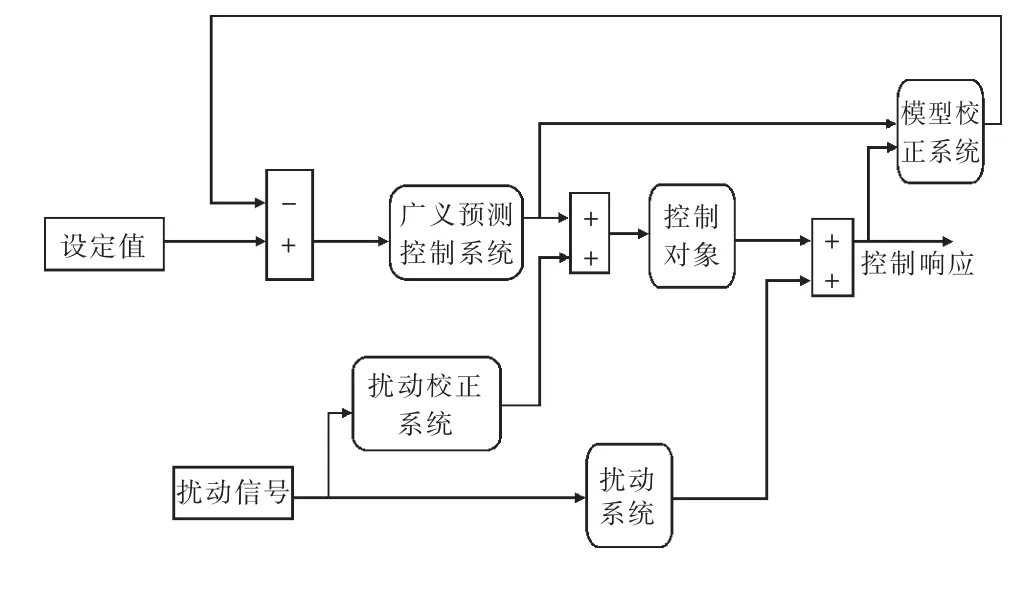
图7 带扰动模型的改进型广义预测控制系统
图7增加了扰动信号系统,能够使该预测控制系统响应更迅速,具有优异的克服扰动能力。
4 工程应用
某发电厂4×600 MW超临界机组锅炉为哈尔滨锅炉厂有限公司制造的单炉膛、一次再热、平衡通风、露天布置、固态排渣、全钢构架、全悬吊结构Π型布置直流锅炉,型号为HG-1890/ 25.4-YM4。汽轮机采用哈尔滨汽轮机厂有限责任公司与三菱公司联合设计、生产的CLN600-24.2/ 566/566型超临界、一次中间再热、单轴、三缸、四排汽凝汽式汽轮机。
SCR(选择性催化还原)脱硝系统采用喷氨控制,该系统采用常规PID控制系统,对于脱硝这类大迟延对象,控制效果不理想,在磨煤机启停和变负荷过程中脱硝系统出口NOX波动幅度大,远远超出了环保标准,需要运行人员频繁干预,劳动强度很大。
采用上述基于扰动模型的改进型广义预测控制方法,主通道模型采用喷氨量对SCR出口NOX的数学模型,扰动通道采用SCR入口NOX浓度对SCR出口NOX浓度的数学模型,按照图7的方式设计带扰动模型的鲁棒广义预测控制系统,当负荷指令按12 MW/min速率变化,机组处于AGC(自动发电控制)状态时,获得的机组出口NOX响应曲线如图8所示。

图8 AGC状态下370~450 MW负荷变动时机组出口NOX响应曲线
图8中,A表示实际负荷,B表示机组出口NOX控制曲线。实际负荷由370 MW变化到450 MW,机组出口NOX控制在±10 mg/m3以内。而且整个AGC过程中机组出口NOX比较平稳。
采用常规PID控制方法,当负荷指令按12 MW/min速率变化时,机组处于AGC状态时,获得的机组出口NOX响应曲线如图9所示。
图9中,A表示实际负荷,B表示机组出口NOX控制曲线。实际负荷由380 MW变化到460 MW,机组出口NOX控制在±30 mg/m3左右。而且整个AGC过程中出口NOX波动幅度较大,影响到了机组的环保运行。

图9 AGC状态下380~460 MW负荷变动时机组出口NOX响应曲线
AGC运行时,脱硝控制系统采用常规PID控制和改进型广义预测控制2种控制方式时,对比效果如表1所示。

表1 控制效果对比
5 结语
以上提出了一种改进型广义预测控制系统,给出了具体的控制结构图,当系统模型参数变化时通过仿真对比,验证了此控制系统具有较强的鲁棒性;为了提高系统克服外扰的能力,还设计了扰动通道算法,形成带扰动模型的鲁棒广义预测控制系统,给出了具体控制结构图。将该系统应用于某600 MW超临界火电机组脱硝控制系统中,明显提高了控制系统的调节品质,实际应用结果证明了带扰动模型的广义预测控制方法的有效性。
[1]朱北恒.火电厂热工自动化系统试验[M].中国电力出版社,2006.
[2]席裕庚.预测控制[M].国防工业出版社,1993.
[3]舒迪前.预测控制系统及应用[M].机械工业出版社,1996.
[4]王伟.一种新的广义预测自适应控制直接方法[J].自动化学报,1996,22(3)∶270-277.
[5]李小田,等.一种基于多模型切换的阶梯式广义预测控制算法[J].化工学报,2012,63(1)∶193-197.
[6]郭伟,王伟.一种改进的广义预测控制算法分析与应用[J].控制理论及其应用,2008,30(2)∶9-13.
[7]李泉,等.超临界机组脱硝系统模型预测控制研究[J].浙江电力,2016,35(11)∶34-36.
[8]刘韬.火电机组脱硝系统测量与控制策略问题分析及优化[J].浙江电力,2016,35(6)∶42-44.
[9]石磊.燃煤锅炉SCR法烟气脱硝技术[J].锅炉技术,2009,40(2)∶76-80.
[10]刘晓敏.烟气脱硝SCR装置喷氨优化研究[J].热力发电,2012,41(7)∶81-83.
[11]刘长良,等.一种改进的遗传算法及其在热工过程控制中的应用[J].自动化仪表,2002,23(9)∶13-16.
[12]林建勇.选择性催化还原脱硝工艺及控制系统[J].太原科技,2007(9)∶73-74.
(本文编辑:张彩)
Research and Engineering Application of an Improved Generalized Predictive Control System
LI Quan,YIN Feng,SUN Jiandong,LUO Zhihao
(State Grid Zhejiang Electric Power research institute,Hangzhou 310014,China)
The optimal control law is obtained by solution of Diophantine equation in the case of a given object model.However,the requirement on model accuracy is so stringent that it can not cater to engineering use.This paper proposes an improved generalized predictive control system that owns control performance in the case of model parameter change,In order to improve the ability of the system to overcome the external disturbance,the disturbance channel algorithm is designed to form a generalized predictive control system with disturbance model.The system is applied to the denitrification control system of a 600 MW supercritical unit to predict the future trend of the controlled object through establishment of the system object model and the disturbance model;in the case of object model change,the system is still strongly robust.
generalized forecast;robust;disturbance;denitration control;model
10.19585/j.zjdl.201708009
1007-1881(2017)08-0044-05
TK323
A
国网浙江省电力公司科技项目(5211DS1350JZ)
2017-06-23
李泉(1979),男,高级工程师,从事热工自动控制研究与应用。