智能巡检机器人在变电运维工作中的改进及应用
2017-09-19胡冬良丁敬黄继荣艾飞王一博
胡冬良,丁敬,黄继荣,艾飞,王一博
(国网浙江省电力公司杭州供电公司,杭州310009)
智能巡检机器人在变电运维工作中的改进及应用
胡冬良,丁敬,黄继荣,艾飞,王一博
(国网浙江省电力公司杭州供电公司,杭州310009)
智能巡检机器人在变电站一次设备巡视、红外测温、表计识别、高清图像对比以及气象数据采集等传统功能应用非常广泛,给变电运维工作带来了极大的便利。本文介绍的新型智能巡检机器人在原基础平台上,进行了功能拓展和创新,通过数据建模和图像比对,实现了变电站一、二次设备巡视范围的全覆盖;安装的5轴机械臂,配以专业局部放电检测仪器,首创国内智能巡检机器人在开关柜暂态地电压局部放电检测功能;此外,携带干粉灭火器,在发生火灾时能第一时间进行应急处置。并结合案例介绍了新型机器人在带电检测方面的应用功能,并将机器人巡检结果与人工测量数据进行对比分析,从定性分析和定量计算两个方面验证了机器人巡检结果的有效性,为变电运维工作提供强大的支撑。
新型智能机器人;红外测温;局部放电检测;变电运维
0 引言
随着“三集五大”政策的不断推进,无人值守变电站的巡视质量和数量如何得到保证是困扰变电运维人员的一个难题。智能巡检机器人(简称机器人)的出现,从某种程度上缓解了这个矛盾。在机器人应用初期,机器人巡视内容主要有2个方面[1]:
(1)机器人搭载了高清摄像头,可定时、定点自动拍照、摄像,对有读数的表盘及油位表计进行数据读取,自动记录和判断,并提出报警。
(2)机器人搭载的红外热像仪对变压器、互感器等设备本体以及各开关触头、母线连接头等的温度进行实时采集和监控,并采用温升分析、同类或三相设备温升对比、历史趋势分析等手段,显示影像中温度最高点位置及温度值,能按照要求对电流致热型和电压致热型缺陷或故障进行自动分析判断,并提出预警。
但在实际应用中,各种各样的问题接踵而来,这就要求在后续项目中应对机器人进行不断地改进和完善。在此通过对常规机器人的学习和了解[2],对比分析介绍了改进型机器人的系统结构和功能,一方面针对常规机器人巡检工作过程中遇到的问题进行了改进和优化,使机器人的巡视更加智能化,减少需要人工干预的数量;另一方面,对常规机器人进行了功能拓展和创新,通过数据建模和高清图像比对,实现了二次设备的巡视,同时配以升降平台,实现不同楼层之间的巡视,完成了变电站一二次设备巡视的全覆盖;通过加装五轴机械臂,配以专业的局部放电(简称局放)检测仪,首创国内智能巡检机器人暂态地电压局放检测功能;此外,携带了2.5 kg干粉灭火器,在发生火灾时能第一时间进行处置,减少故障范围的扩大,为设备运维人员争取更多的处置时间。
以下重点介绍机器人在运维带电检测功能方面的应用,并通过红外测温及局放试验两个实际案例的分析和多次试验,指出机器人的巡检结果的有效性,为机器人在变电运维工作方面的推广提供一定的借鉴经验。
1 改进型机器人系统功能
根据国家电网公司《变电站智能机器人巡检系统技术规范》第1部分要求变电站巡视机器人需具备可见光检测、红外检测以及噪音检测3个方面的功能;而改进型机器人的系统结构如图1所示,从图1中可以看出,改进型机器人在原硬件基础平台基础上,新增了应急处理功能和局放试验功能。
智能巡检机器人与无线网桥的基站之间采用无线通信方式接入,无线网桥基站及微气象模与后台的连接采用有线通信方式进行,机器人后台主控计算器专线接入浙江省电力公司集中配置变电站智能机器人巡检系统,不接入电力系统内网。
机器人智能巡检系统中主要包括:
(1)机器人本体控制系统,主要实现以下功能:云台角度控制、检测设备控制(如可见光摄像机、红外热成像仪和声音采集等)、传输控制、机器人运动控制、停障控制、机器人电源管理和储电控制。
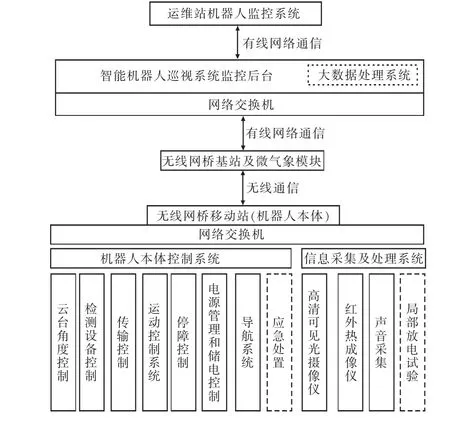
图1 改进型智能巡检机器人系统结构
(2)导航系统:利用传感器确定机器人在变电站中的精确位置,识别出道路区域和障碍物区域,并规划出到达目标的合适路径。
(3)自主充电系统,可检测机器人的本体的设备状态,需充电时,控制机器人回到充电室,完成充电。
(4)信息采集及处理系统,其功能主要包括:各种仪表的数据读取、断路器和隔离开关的分合状态、红外测温、设备运行噪声的采集和分析。
(5)监控系统:用户的主操作界面,可实现与机器人双向信息交互,信息交互内容包括检测数据和机器人本体状态数据;监控系统还可控制机器人进行自主巡检、特殊巡检、遥控巡检等。
(6)大数据处理系统:收集机器人本体采集的各种检测设备信息,自动统计生成报表,实现多源异构检测数据存储和处理,实现在线状态评价;并可结合历史数据,分析设施运行情况。
(7)应急处置:利用机器人平台携带2.5 kg干粉灭火器,在发生火灾情况下第一时间通过遥控指令的方式对现场进行紧急处理,避免灾情的扩大,为运维人员赶赴现场争取一定的时间。
(8)局放试验:在运维工作中,对开关柜进行TEV(暂态地电压)检测是发现开关内容故障和异常的一种常见的手段,改进型机器人安装有5轴机械臂,携带专业的局放测试仪,可以对开关柜进行暂态地电压局放试验。
2 机器人的改进
巡视机器人的应用逐步推进,但在前期的试点工程中,机器人的应用遇到许多困扰和难题,本站在汲取了其他地区应用的经验,对运行实际工作遇到的下述问题进行了解决和完善。
(1)机器人在户外平面布置变电站的设备巡视中得到广泛使用,但对于户内层次布置变电站则显得无能为力[3]。若采取每层都配置1台机器人,其成本大大增加,治标不治本。
本站利用楼层的设备平台,对原楼梯扶手进行了改造,并建立了合理的升降平台,使机器人能够按照巡视指令,通过轿厢实现了不同楼层的运载,并对设备区大门进行了改造,使设备区大门的开启和关闭能够按照机器人的指令进行,同时具备防小动物进入安全措施。
(2)本地区机器人的行驶路线最初采用导磁轨道,户外变电所在设计巡视路线时需要在电缆盖板上安装轨道磁条,在日常工作中,电缆盖板的翻动会造成机器人导轨磁条的损坏,导致机器人无法按照指定路线行驶,增加后期维护工作量[4]。
改进型机器人利用激光定位其在变电站中的精确位置,识别道路区域和障碍物区域,并规划出合适路径,实现无轨运行,大大减少了因轨道损坏而导致机器人停运的概率。
(3)当设备现场工作设备挡住了机器人行驶路线时,部分厂家的机器人不会识别,会撞上障碍,这样需要人工通过监控后台主机的急停按钮使机器人停止作业;部分巡检机器人巡视到障碍时会停止原地,直到电量消耗不足时返回充电。文献[5]提出一种绕行方案,从理论上来说是可行的,但是考虑到机器人未按规定路线行驶存在不确定的风险。
改进型机器人检测到行驶线上遇到障碍物时,则直接停止作业,返回充电房并向监控后台发出告警信息。提醒机器人巡视任务发布人员应结合现场工作,对相应的区域进行回避。
(4)户外通信网关与机器人之间采用无线通信,通信中断后,往往机器人现场拍摄的图片无法传送到后台,常规机器人会止步于此步任务而导致工作无法继续运行[6]。
改进型机器人自身具备一定存储功能,当通信故障时,机器人将数据存储于自身的存储空间,待通信恢复后自动上传。
3 新功能的开发
对机器人还开发了一些新的功能:
(1)二次设备巡视。本次对机器人功能的拓展开发包括了二次设备的巡视,利用高清相机对二次设备状态进行拍摄,进而对图片中压板和切换开关的位置进行辨识,与数据库中设备状态进行比对,进而分析二次设备状态进行分析,同时对告警信号指示灯的状态进行分析,一旦出现异常告警或状态不一致情况及时告知监控后台引起值班员注意。
(2)红外设备测温。红外设备测温是变电运维工作发现设备缺陷隐患的一个重要手段,常用来监测设备的温度,跟踪带电运行的缺陷设备的缺陷发展情况。常规机器人的巡视在红外测温数据采集方面做的比较成熟,但其在数据处理方面仅对三相设备同一部位的温差进行了分析,数据分析不够全面,在发现异常时需要人工进行复测和干预。而改进型机器人仍采用原红外测温硬件平台,从数据处理能力方面入手,结合环境温度、湿度、发热设备的负荷大小、采用温升分析、同类或三相设备温升对比、历史趋势分析等手段,对设备温度数据进行智能分析和诊断,实现对设备故障的判别和自动报警,为检修提供有力的检修依据。
(3)局放检测。随着运维一体化的推进,设备的局放试验工作原来由检修人员进行改为运行人员进行,并作为定期巡视的一项内容执行。在局放测试试验中,不同的测试人员对测试的结果影响较大,如选择参考环境的不同,对局放测试仪的使用、局放测试点选择等。改进型机器人安装有5轴机械臂,末端携带先进局放探测头,在国内首次实现了开关柜局放检测功能,减少人为测试因素的影响,数据的对比分析更具说服力。在实际应用中,先由专业局放检测人员对开关柜不同部位定点进行暂态地电压局部放电检测,确定最优局放测试中参考背景及开关柜局放测试点,在开关柜上做好相应的标记,对机器人进行编程调试,使机器人的局放试验定点定位进行,通过多次的人工复测和机器人检测数据进行对比分析,得出机器人巡检数据的一致性,可代替人工进行局放试验及分析。
(4)事故应急处置。在现有无人值班模式中,一旦发现设备现场出现异常,可以遥控机器人第一时间赶赴现场进行检查,一旦发现火灾险情,可以通过自身携带的灭火器进行处置,将火灾事故消灭在萌芽状态,避免火灾范围的扩大和设备的损坏。
4 实际应用
改进型机器人对二次设备告警信号、压板的巡视原理与一次设备状态辨识的原理相同,均是利用高清相机拍摄图片与模板进行对比;在事故应急处理方面,机器人需要人工遥控干预才进行紧急处理,在此不作详述。
结合巡检机器人在运维工作的应用,对机器人红外测温和局放试验两个方面进行案例分析,通过机器人巡视中发现的异常进行了多次跟踪检测,从而验证了机器人在领域的应用效果。
4.1 红外测温功能的应用
某220 kV变电所给机器人布置了220 kV一次设备巡视任务,红外测温结果中,发现220 kV母联正母闸刀C相靠正母线侧刀口发热和3号主变110 kV正母闸刀A相靠开关侧刀口存在发热现象,采用人工复测验证了机器人巡视结果的正确性,以下以220 kV母联正母闸刀的红外测温为例进行说明。
当日10∶37,天气晴,环境参照体温度8.8℃湿度70%。图2为机器人巡视中220 kV母联正母闸刀C相靠正母线侧刀口高清图片,图3为机器人巡视红外测温,显示C相发热点温度为30.22℃,A与B两相测量数据见表1。

图2 机器人巡视可见光高清图
图4为人工对该闸刀C相同一部位进行红外复测,测量数据见表1,从定性上分析,无论是机器人巡检测温还是人工测温,C相温度比正常A与B两相均高。
从定量的测温数据来看,人工测温与机器人测温数据上存在一定的数据差,一方面系测温仪器的精度不同带来的影响,另一方面人工复测的数据取自测温对象框中最高温度,而机器人测量的数据则取自红外测温仪对焦点的温度,测温点位少许的误差,也会导致测量的温度存在一定的数据差。对于正常设备A/B相的测温,机器人测温和人工复测几乎一致。由于设备测温数据与设备的运行状态、负荷大小、天气、仪器的精度、测温的角度等都存在一定的关系。在实际运维工作中,三相相同部位最大温差以及最大相对温差2个指标才是作为对设备发热缺陷定性参考,从表1中可以看出,人工测温和机器人测温的最大温差分别为16℃与19.6℃,最大相对温差74.8%,74.2%,参考DL/T 664-2008《带电设备红外诊断应用规范》,发热点温升大于15℃,且当前负荷率较小,但是考虑到相对温差小于80%,因此定性为220 kV母联正母闸刀C相闸刀发热为一般缺陷。

图3 机器人红外测温图
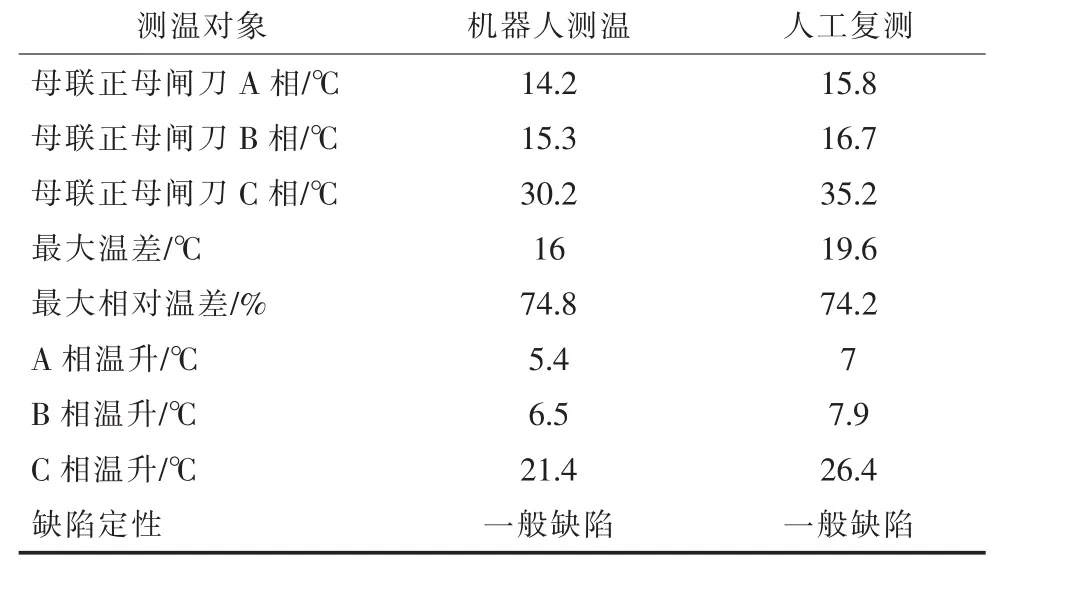
表1 220 kV母联正母闸刀测温数据及分析

图4 人工红外测温复测图
综上所述,从定性的分析和定量计算来看,机器人测温与人工测温在某种程度上表现出高度一致,其测温结果可以作为运维工作的巡视内容。
针对上述内容,常规机器人数据处理系统中仅能实现三相数据的最大温差(相间温度最大差值)计算,通过温差的计算来确定缺陷的定性;而改进型机器人系统在后台数据处理系统中采用温升(发热部位与参照体温度差)分析、同类或三相设备温升对比能够发现设备运行的异常,并综合考虑设备的定性。以表1数据为例,单相设备发热情况下,此时采用温差和温升进行数据分析,均能准确的判断发热设备,但若该设备三相整体均发热的情况下,三相温差并不大,此时无法进行缺陷定性,而温升较大,因此改进型机器人在发热设备的判断更全面准确。改进型机器人后台增加了对历史数据的纵向判断,通过对该设备历史测温数据进行统计,以折线图形象的展现了该设备温度变化的趋势,由此可见,改进型机器人在数据处理能力方面比常规机器人更加强大全面。
4.2 暂态地电压局放测试
运维一体化不断深入和推进,开关柜及接地变等柜内设备的局放检测也纳入运维人员工作内容。在机器人上安装配置暂态地电压局放测试仪,通过5轴机械臂的伸缩完成测试。在机器人安装调试时,由专业检测人员多次检测并确定测量部位,以保证测量数据尽最大可能的反映设备运行真实状况。本案例以机器人所在变电站35 kV开关柜为测试对象,机器人测试结果如表2。
局放检测数据与设备的环境、测量部位,仪器的精度、测量人员的水平等均存在关联[7-10],为验证机器人局放测试数据,将机器人携带局放仪拆卸改由人工检测,其检测结果与机器人检测结果几乎一致。将本站使用的局放测试仪再次将35 kV开关柜重新做一次检测试验,由于设备厂家和精度的不一样,虽然测量数据不一定相同,但人工检测和机器人检测数据与参考背景值之间最大差值不超过6 dB,均在合格的范围之内。

表2 35 kV开关柜暂态地电压局放(TEV)测试
5 结语
改进型智能巡检机器人在原来基础上进行了完善和优化,使得机器人能够满足变电所不同楼层之间的一/二次设备巡视,在火灾险情时能通过遥控进行初步处理,并拓展了机器人在暂态地电压局放检测方面的应用,以试验案例的方式对机器人在带电检测方面进行验证,证明机器人在带电检测方面的可靠性和有效性。
随着高新科技的不断应用,机器人的发展日异月新,在变电站运维工作中可发挥的作用越来越重要,需要不断地加以优化和改进:
(1)机器人在避障方面问题依然未实现,在以电缆盖板为巡视路线的区域一旦电缆盖板掀起,机器人将会受到机械性损伤。
(2)在二次设备巡视时,其压板状态目前还只是停留在与模板的核对工作,而未实现根据监控后台设备状态去核对二次设备状态。
(3)机器人在应急方面的应用有待进一步提升,如在设备故障情况下,遥控无法拉开开关时,由机器人现场进行紧急分合闸。
[1]国家电网公司.Q/GDW 11516-2016变电站智能机器人巡检系统运维规范[S].北京:中国电力出版社,2016.
[2]徐庆峰,夏石伟,何碧静.变电站智能巡视机器人系统的运维分析[J].浙江电力,2014,33(5)∶30-32.
[3]吉晏平.变电站设备巡视技术的发展[J].电气工程应用,2010(4)∶30-32.
[4]吕剑,罗天宇,叶宣廷.基于ARM-STM32F030X4的变电站日常巡视机器人研究[J].中国高新技术企业,2016(29)∶15-17.
[5]刘瑶,李卫国.北方地区无人值守变电站巡视机器人[J].机器人技术及应用,2011(11)∶34-35.
[6]朱晶亮.变电站智能巡检机器人的应用[J].机电信息,2016(18)∶53-55.
[7]彭晶,刘光琪,丁薇,等.高压开关柜暂态地电压局部放电检测方法研究[J].云南电力技术,2016,44(4)∶26-29.
[8]王立.开关柜暂态地电压-超声波局放带电监测技术运行探讨[J].科技创新与应用,2016(25)∶192.
[9]菅毓蔚.浅谈暂态地电压和超声波法在开关柜局放检测中的联合应用[J].科学之友,2012(10)∶2-3.
[10]陈巧勇,李宏雯,余睿,等.暂态地电压和超声波在开关柜检测中的应用[J].浙江电力,2012,31(4)∶47-50.
[11]裴玉龙,章立宗,刘永新,等.基于多源信息融合的设备动作状态自动识别方法的研究[J].浙江电力,2016,35(10)∶65-68.
[12]凌光,储祥国,张秀锋,等.基于系统测试观点的智能变电站与传统变电站继电保护比较研究[J].浙江电力,2016,35(7)∶32-36.
[13]钱金菊,王柯,王锐,等.变电站智能机器人巡检任务规化[J].广东电力,2017,30(2)∶143-149.
(本文编辑:陆莹)
Improvement and Application of Intelligent Inspection Robot in Substation Operation and Maintenance
HU Dongliang,DING Jing,HUANG Jirong,AI Fei,WANG Yibo
(State Grid Hangzhou Power Supply Company,Hangzhou 310009,China)
Intelligent inspection robot is widely used in equipment inspection,infrared temperature measurement,meter identification,HD image contrast,and meteorological data collection,bringing great convenience to substation operation and maintenance.In this paper,the new intelligent inspection robot carries out functional expansion and innovation based on the original platform,and achieves full coverage of substation primary and secondary equipment by data modeling and image comparison.The intelligent inspection robot firstly applies professional partial discharge tester and the equipped 5-axis arm to test partial discharge of transient earth voltage in the switch cabinet in China;besides,the robot carries dry powder extinguisher for emergency use in case of fire.By combining specific cases,the paper introduces applications of the new robot in live testing and compares the robot inspection result with manual measurement data;moreover,it verifies robot inspection in terms of qualitative analysis and quantitative calculation to give support to substation operation and maintenance.
new intelligent robot;infrared temperature measurement;partial discharge detection;substation operation and maintenance
10.19585/j.zjdl.201708006
1007-1881(2017)08-0029-06
TM73;TP242.6
B
2017-06-02
胡冬良(1982),男,硕士,工程师,技师,从事电力系统控制、运行、分析工作。