基于单神经元PID桥载空调温控系统仿真
2017-09-19林家泉
林家泉,李 博
(中国民航大学电子信息与自动化学院,天津 300300)
基于单神经元PID桥载空调温控系统仿真
林家泉,李 博
(中国民航大学电子信息与自动化学院,天津 300300)
在使用桥载空调代替飞机机载APU的过程中,对桥载空调的控制成为运行管理中的重点。通过对桥载空调的建模,建立温控系统模型传递函数,为提高温度的控制精度,采取一种改进的单神经元PID控制器,结合传统PID控制方法,并且在单神经元的基础上进行权值与K值的改进,编写S函数,建立被控系统的Simulink模型。用Matlab软件对桥载空调温控系统进行仿真,对比传统PID与改进的单神经元PID的控制效果,仿真结果表明,该改进算法有效地提高了桥载空调系统的快速性与稳定性,具有较好的应用前景。
单神经元PID;桥载空调;仿真分析
近年来,在民用航空行业中越来越多的机场使用桥载设备代替飞机自身的机载APU。桥载空调是指悬挂于机场登机廊桥底部的空调机组,在飞机停靠登机桥后,可以采用桥载空调提供飞机地面作业所需的电力和空调供应[1]。机载APU是通过航空燃油来发电,燃油费用较高,而桥载空调是消耗工业用电,替代机载APU使用所产生的费用远比APU直接消耗费用低[2]。而桥载设备的采购费用和日常维修费用按照通常的设备管理费用计算,也远比航材维修费用低很多,可见使用桥载设备的优势非常明显。同时,APU直接燃烧航空燃油,直接排放污染,而桥载设备工作时没有直接的污染排放,所以使用桥载设备在减少环境污染方面也有重大意义。但在推广过程中,调研结果反映出机场一些问题,导致APU“关不掉”,究其根源在于不能正确评估飞机客舱的能耗需求以及对桥载空调控制的盲目性。
本文以能量守恒定律为基础,建立了桥载空调系统部件及被控对象的模型,进而推导出整个温度环节的数学模型,为计算机仿真奠定了一定的基础[3-4]。对桥载空调的控制主要是对温度的控制,进而使其满足客舱温度的需求。温度控制系统通常采用PID控制,PID控制器是最简单的有时又是最好的控制器,只需设定3个参数即可[5]。但在实际应用中,桥载空调所处的环境复杂多变,会导致温度控制对象具有非线性、时变等一些特点。因此,单纯依靠常规PID算法,不能满足桥载空调对温度的要求,控制效果也往往达不到人们的要求。
本文使用一种改进的单神经元PID控制算法,该控制器将单神经元的自学习、自适应特性与传统PID的优点相结合[6],并且对该控制算法进行K值与权值的改进,可以更好地完成对桥载空调温度系统的控制。仿真结果表明,该方法在桥载空调温度控制系统中的控制效果比传统PID的要好,而且在实际应用中也比较容易实现。
1 桥载空调温度控制系统模型建立
本文以A320飞机桥载空调为实验背景。飞机桥载空调机组是置于民航飞机以外,利用较长的送风管道和飞机专用接头,通过飞机机身下部的外接空调接口和机身内部复杂的送风管道向机舱内送风的一种全新风特种空调机。其温度控制系统工作原理为:通过温度传感器对出口供风温度进行实时监测,控制器接收到温度的监测值,与设定值进行比较,根据两者的偏差进行算法的调节,步进电机收到输出信号后,通过调节阀门的开度来调节出口供风温度,传感器监测到新的供风温度并再次与设定值对比,如此循环下去直至偏差为0,完成对温度的控制[7],最后产生满足通风温度要求的空气经送风管道送入飞机[8]。飞机桥载空调系统工作原理如图1所示。
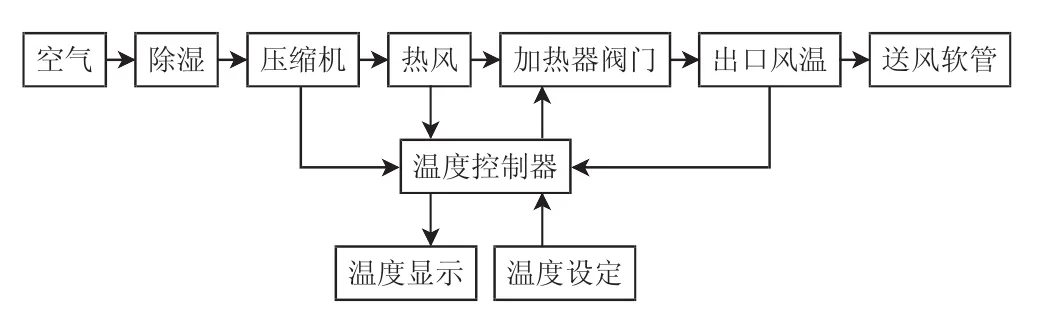
图1 桥载空调工作原理图Fig.1 Working principle diagram of bridge air conditioning
根据机场操作地面支持设备技术规范可知,飞机桥载空调温度控制系统的控温范围为1.5~70℃,要求能在不同区域、不同季节下正常工作。
1.1 温度控制对象模型
控制桥载空调出风口的温度达到设定温度,然后经送风软管把新风送入飞机中。根据能量守恒原理,单位时间内进入软管内的能量与流出软管内的能量的差值就是储能变换率。能量模型为

其中:CV为空气容积比热容(J/(m3·℃));V为体积(m3);t为管道空气温度(℃);ts为送风温度(℃);t0为空气温度(℃);ρ为空气密度(kg/m3);c为空气比热容(J/(kg·℃));G为送风量(m3/h);R为围护结构热阻(m2K/W),可表示为

其中:σ为材料厚度(m);λc为材料导热系数(W/(m·K))。
送风软管体积可经过实际测量得出,取软管长度20 m,直径0.2 m。机组送风量按8 000 m3/h计算。同样由机场操作地面支持设备技术规范可知,送风软管与飞机接口处的工作压力为15.2 PSI,接近1标准大气压。在标准大气压力下,空气密度会随着温度的变化而变化,查阅资料可知,密度与温度之间的关系如图2所示。
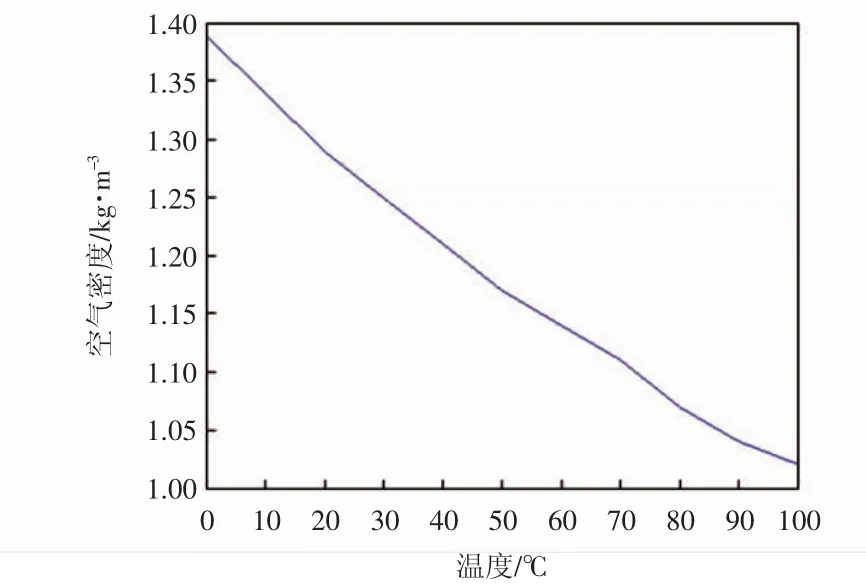
图2 空气密度与温度的关系Fig.2 Relationship between air density and temperature
桥载空调送风软管的主要材质为PVC,保温隔热性能优良,导热系数为0.14 W/(m·K),厚度5 mm。对式(1)整理后可得
1.2 加热器对象模型
加热器在压力作用下,对送入加热器的加热介质进行加热,加热介质送出加热器后带走加热器工作中产生的热量,对空气进行加热。根据热平衡方程,可得加热器温度对象的模型为
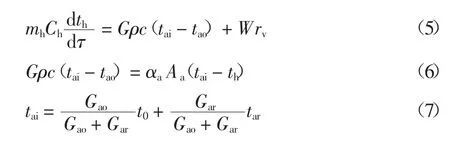
将式(6)和式(7)代入(5)中,整理得

其中:αa为传热系数(W/(m2·℃));Aa为换热面积(m2);mh为质量(kg);Ch为比热容(kJ/(kg·℃));th为温度(℃);tai为进风温度(℃);tao为出风温度(℃);tar为回风温度(℃);Gao为新风流量(m3/s);Gar为回风流量(m3/s);W为加热蒸汽的质量流量(kg/s);rv为加热蒸汽的汽化潜热(J/kg)。
加热蒸汽汽化潜热可根据蒸汽汽化潜热值换算表得出,设定温度为70℃时,汽化潜热约为2 331.2 J/kg,加热器质量取15 kg。加热器的换热面积可表示为

其中:Q为加热器传热量,制热能力为604 kW;αa采用波纹状螺纹管的传热系数为3.4;Δth为加热器进出水温度差,取5℃。
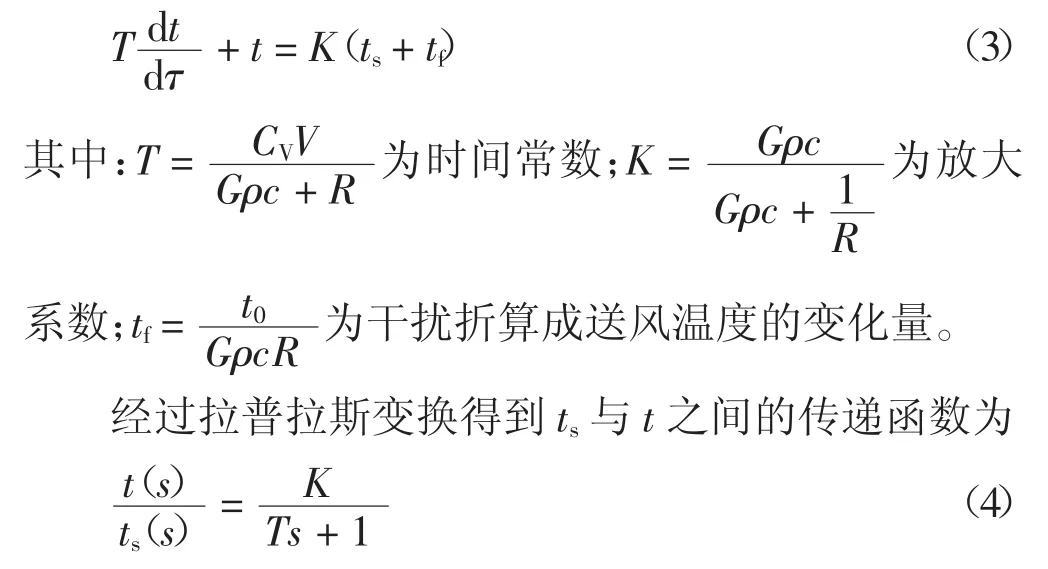
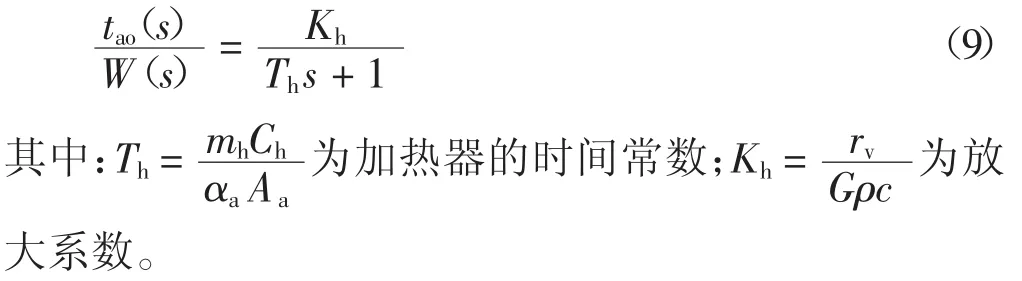
对式(8)经过拉普拉斯变换得到W与tao的传递函数为
1.3 桥载空调温控系统传递函数
系统的输出量是温度t,输入量是加热器阀门u,不考虑其它阀门的影响,把加热器出风温度tao看作是桥载空调的送风温度 ts,根据式(4)和式(9),考虑到过程滞后的影响,可得到关于空气密度的传递函数,即

实际过程中系统启动需要按下启动按钮,启动220 V供电电路,延时5 s后启动冷凝风机,延时5 s启动蒸发风机,制热模式下,延时10 s启动加热器,所以需在传递函数中添加延迟函数,设置τ=20 s来满足实际启动过程。
2 单神经元PID控制器及其学习算法
2.1 单神经元PID控制器的结构
PID控制器由比例、积分、微分单元构成,P为比例环节,起放大作用;I为积分环节,可以消灭稳态误差;D为微分环节,可以加快系统的反应。工程上常常在闭环系统中加入PID环节,因为其结构简单,参数调整容易,易被人们接受。但在实际过程中,控制系统往往不是线性的,而且会随着时间的变化而变化,所以常规的PID控制器不能很好地完成对系统的控制。借助神经网络的自学习和逼近任意函数的特性,把神经网络与传统PID结合起来,组成一个新的控制器,能在一定程度上解决PID参数在线整定问题,也可以提高时变、非线性系统调节的快速性与稳定性[9]。并且单神经元网络是由一个神经元模型建立的神经网络系统,其结构简单、容易计算,对温度的调节有较好的实时性。为了更好地完成对系统的控制,桥载空调温控系统采用了单神经元PID控制算法。
由单神经元构成的PID桥载空调温控系统结构如图3所示,用单神经元实现PID控制时,转换器的输出为神经元控制所需要的状态量,即
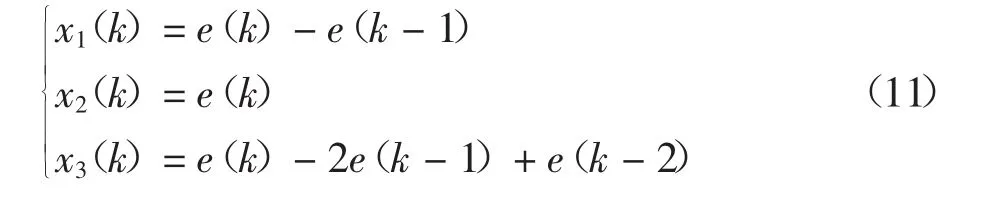
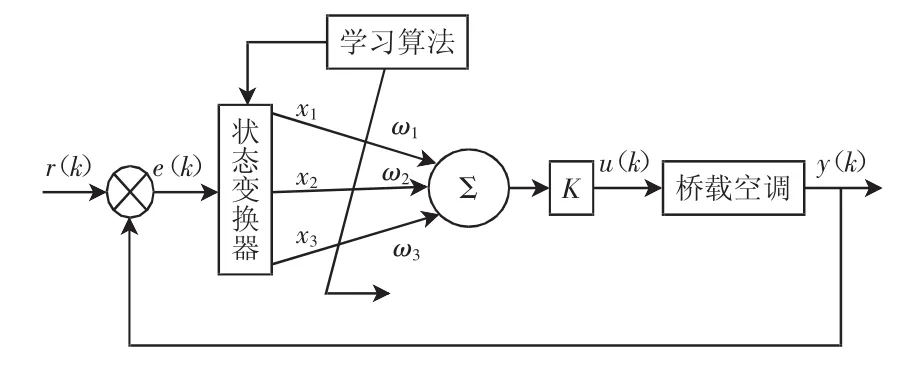
图3 基于单神经元PID的桥载空调温控系统Fig.3 Temperature control system of bridge air conditioning based on single neuron PID
控制器的输出为

其中:K 为神经元比例系数且 K > 0;e(k)=r(k)-y(k-1);ωi(k)为对应于xi(k)的加权系数。
2.2 单神经元PID的改进控制算法
单神经元PID控制器是借助于对权值的调节来完成系统自适应的功能,本文中采用Hebb学习算法调整神经网络权值,并对该算法作一定的改进。在实际应用中,e(k)和 Δe(k)的变化对参数选择有很大影响,所以将单神经元PID控制算法中连接权值的学习规则作部分调整,即将ωi(k)中的xi(k)修改为e(k)-Δe(k),这样权值的学习过程不仅是根据神经元学习理论,同时考虑到了控制过程的实际经验,改进后的算法可表示为

其中:ηi(i=1,2,3)分别为积分、比例、微分的学习效率;Δe(k)=e(k)-e(k-1)。
在单神经元PID控制器中,对于比例系数K的配置依然采用人工调整的方式,给定一个值反复试验,导致调试的过程繁琐冗长。针对K值的调节可采用非线性控制调节的方法[10],使 K 根据 e(k)与 Δe(k)差值的绝对值大小自动调整,且调整的速度也会根据误差变化的快慢而调节,采取这种方法可有效地加快系统的响应速度。但要避免K值过大系统出现震荡和K值过小系统出现积分饱和的现象,就必须将K的取值限定在一定范围内。
其中:KA为比例增益的下限;KB为比例增益的上限;nA为KA对应的下限分界点;nB为KB对应的上限分界点。
上述改进的算法可根据学习信号所反映的环境与误差的变化,利用新的学习规则调整各状态量的权值及K值,实现在线调整与自适应控制的作用。
3 单神经元PID控制器的桥载空调系统仿真
由于单神经元PID学习算法不能用简单的Simulink模块来创建,单纯的应用Simulink将不能完成对桥载空调系统的仿真,需要用编程的形式设计出S函数模块[11],S函数有固定的程序格式[12],用Matlab语言编写成M文件,同时把改进的Hebb学习算法编译进去,形成S函数模块,嵌入到桥载空调系统的仿真模型中。建立好的系统模型如图4所示。
本文研究对象是A320飞机桥载空调系统,在软管入口温度需达到70℃时,此时空气密度为1.11 kg/m3,根据以上对桥载空调系统的建模,可以得到系统的传递函数。单神经元PID控制器K值的不同会影响权值的取值,根据试验结果,最终确定KA=2,KB=3,nA=5,nB=10。对桥载空调采用单神经元PID与传统PID控制,得到的仿真结果如图5所示。
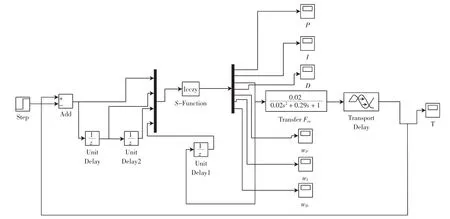
图4 单神经元PID桥载空调系统仿真模型Fig.4 Simulation model of single neuron PID bridge air conditioning system
从图4的仿真模型中也可以得到P、I、D等参数的变化,如图6所示。
由以上的仿真结果可以看出,采用单神经元PID控制器,入口温度为70℃时,系统逐渐趋于稳定,P、I、D参数的取值也趋于稳定,分别取值7.6、68、180。在前20 s的时间内,由于冷凝风机、蒸发风机及加热器的延时工作,对温度的调节从20 s之后开始,随着加热器的工作,对加热介质进行加热,进而对空气进行加热,逐步达到软管出风口的温度要求。传统PID控制器的仿真曲线有些震荡且有较大超调,超调量为10℃,而单神经元PID控制器几乎没有超调且达到稳定的时间也较快。
在软管入口温度需要达到1.5℃时,此时空气密度为1.39 kg/m3,建立传递函数,仿真结果如图7所示。
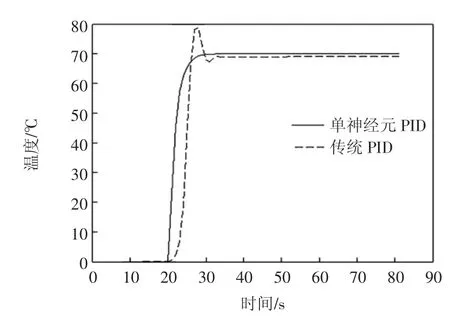
图5 70℃PID与单神经元PID控制器仿真输出Fig.5 Simulation output of 70℃PID and single neuron PID controller
从仿真结果图可以看出:在入口温度为1.5℃时,采用单神经元PID同样有一个较好的仿真结果,比传统PID有更快的响应速度且稳定性较好。可见,单神经元PID控制器比传统PID控制器具有更好的稳态精度,而且单神经元PID还可以进行参数的自我调节,通过自学习改变权值,所以比常规PID具有更好的动态特性。因此,在桥载空调系统中采用单神经元PID控制器可以获得一个很好的控制效果。

图7 1.5℃PID与单神经元PID控制器仿真输出Fig.7 Simulation output of 1.5℃PID and single neuron PID controller
4 结语
本文建立了A320飞机桥载空调温度控制系统的传递函数,运用S函数构建了桥载空调系统的仿真模型,在单神经元PID的基础上作一些算法的改进,使其更好地完成对系统的控制。在Matlab上分别对传统PID及改进的单神经元PID进行了仿真,结果表明,在飞机桥载空调系统中,采用改进的单神经元PID算法可以更好地保证系统调节的快速性与稳定性。
[1]王 昕,江 航,郑益慧,等.飞机空调车的多模型PID控制器设计[J].控制工程,2016,23(4):453-457.
[2]崔沈夷.飞机地面空调的选用及其节能意义[J].暖通空调,2013,43(7):30-36.
[3]杜明明.变风量空调系统的Simulink建模与仿真研究[D].哈尔滨:哈尔滨工业大学,2006.
[4]李康吉.建筑室内环境建模、控制与优化及能耗预测[D].杭州:浙江大学,2013.
[5]王海青,姬长英,刘同召,等.模糊自整定PID温度控制系统的建模与仿真[J].计算机工程,2012,38(7):233-235,239.
[6]盛贤君,姜 涛,王 杰,等.基于BP神经网络的速度前馈PID控制器设计[J].计算机应用,2015,35(S2):134-137.
[7]潘琢金,张彬彬,毛艳娥,等.飞机空调车的模糊CMAC-PID温度控制器设计[J].计算机仿真,2013,30(3):38-41,156.
[8]林美娜,赵 薰,林运龄.某国际机场飞机地面空调机组的研制及其关键技术[J].制冷与空调,2014,14(10):75-78,82.
[9]易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,2002.
[10]王秀君,胡协和.一种改进的单神经元PID控制策略[J].浙江大学学报(工学版),2011,45(8):1498-1501.
[11]张学燕,高培金,刘 勇.BP神经网络PID控制器在工业控制系统中的研究与仿真[J].自动化技术与应用,2010,29(5):9-12.
[12]程卫国.MATLAB5.3应用指南[M].北京:人民邮电出版社,2000.
(责任编辑:孟 欣)
Temperature control system simulation of bridge air conditioning based on single neuron PID
LIN Jiaquan,LI Bo
(College of Electronic Information and Automation,CAUC,Tianjin 300300,China)
During the process of using bridge air conditioning instead of airborne APU,controlling of bridge air conditioning has become the focus of operation and management.By modeling the bridge air conditioning,temperature control system transfer function is established.In order to improve the accuracy of the temperature control,an improved single neuron PID controller combined with the traditional PID control method is taken.And on the basis of single neuron,the weight and K value are improved,and the S function is written to establish the Simulink model of controlled system.Matlab is used to simulate the temperature control system of bridge air conditioning system,and the control effect of traditional PID and the improved single neuron PID are compared.Simulation results show that the improved algorithm can effectively improve the speed and stability of bridge air conditioning system,and has good application prospect.
single neuron PID;bridge air conditioning;simulation analysis
V351.3
:A
:1674-5590(2017)04-0041-05
2017-02-27;
:2017-03-17
:天津市自然科学基金项目(13JCYBJC42300)
林家泉(1975—),男,黑龙江鹤岗人,副教授,博士,研究方向为飞机客舱能耗预测控制.