Theautomotiveanti-collisionsystembasedonUltrasonic
2017-09-18,,,
, , ,
(The College of Information,Mechanical and Electrical Engineering,Shanghai Normal University,Shanghai 200234,China)
Theautomotiveanti-collisionsystembasedonUltrasonic
Qi Qinqin,ZhangBaosen,ZhaoGengming*,ShenDanlai
(TheCollegeofInformation,MechanicalandElectricalEngineering,ShanghaiNormalUniversity,Shanghai200234,China)
In the existing system of automobile anti-collision,the radar is mainly used for ranging.However,it can′t be widely used because of its high cost.In this paper,based on the existing system of automobile anti-collision,the ultrasonic sensor is used to measure the distance and establish relevant anti-collision model.The experimental results show that the alarming information is accurate within a certain range.
the system of automobile anti-collision; ultrasonic sensor; the algorithm of ranging
0 Introduction
With the development of city economy and the increase in population,as of2013,the national vehicle retains the quantity to137million,nearly an average annual increased more than11million cars in the past decade,however,the rate of mortality caused by traffic has increased meanwhile.In recent years,the traffic accidents happen frequently,which directly threats the public safety and causes huge loss of property.The cause of the serious situationas follows:speeding or drunk driving and the uselessness of the system of automobile anti-collision[1].With the development of the embedded technology and related hardware,the embedded vehicle monitoring system starts to enter the automotive industry at the same time[2].Internationally,such as Germany,Japan,the United States and other counties of advanced car producers began to research and develop the safe mechanism of active anti-collision more than a decade ago.January6,2014,TOYOTA and Audi showed independent researches and developments of unmanned vehicles in the United States.The research on automotive anti-collision system technology is relatively rare.There are two companies,Tai Yuan and Chao Yue,which research and develop the management system.The automotive anti-collision device of Tai Yuan,is the most advanced products in China at present.Its technical content has been at the top of the world′s advanced technology,but the cost is expensive.According to the above situation,this article optimizes the vehicle model based on the ultrasonic ranging system in a wide range[3].By the ARM development platform,a system of vehicle anti-collision is designed,which is suitable for modern vehicle.The function of the system is simple and practical,the price is reasonable,and the system has the advantage of universal.
1 System hardware design

Figure 1 System overall design block diagram
In this paper,we choose a kind of embedded system based on ARM processor[4],and build the necessary peripheral equipment,with the ARM11processor as CPU combined with ultrasonic distance measurement device,speed sensor,alarming device and related device interface.A typical embedded devices is built.The system uses the mainstream Linux operating system.The framework of the overall design of the system is shown in Fig.1.
1.1ARMmastercontroller
OK6410 development board based on Samsung ARM11 processor,which is a RSIC processor with low power consumption and high performance.It is based on ARM11 kernel (ARM1176JZF-s) and can be widely used in mobile phones,general processing and other fields.S3C6410 2.5G and 3G communication service provides optimized hardware performance and built-in powerful hardware accelerators,including motion video processing,audio processing,2D acceleration,display and scaling and so on.
1.2Ultrasonicdistancemeasuringdevice


Table 1 Comparison of different location device
1.2.1 Ultrasonic transmitter module
Ultrasonic transmission circuit includes two parts:ultrasonic control circuit and ultrasonic wave generating circuit.We choose DY150 high-power transducer as ultrasonic probe model,and the central frequency of the transducer is 15 kHz,maximum range is 50 meters.Its biggest characteristic is to transmit and receive integrated together.
1.2.2 Ultrasonic receiver module
This article adopts the way of interrupt signals to receive the signal.Ultrasonic sensor reflects a bunch of ultrasonic signal which spread through the air,and return when it encounters some obstacles.Ultrasonic receiving device receives the echo signal.Due to the amplitude of received echo signal is small,it will be further processed by amplification,detection and filtering.Finally,a pulse signal is output through a voltage comparator,and then is input to the MCU external interrupt input end,causing SCM interrupt.
1.3AlarmingModuleDesign
In the vehicle driving process,if the distance between two vehicles is less than the safe distance,the alarming module of the ARM development board is used to light the LED alarming circuit with the anti-collision algorithm.
2 Establishment of automobile anti-collision models
2.1Principleofestablishingmodel
In order to make the system be able to effectively serve as warning to the driver and be unable to interfere with the driver for normal driving by too many reminders,the establishment of model should follow[6].
1) The distance of reminder and alarm should be left for enough reactive time to the driver.When the driver hears the alarm,he can prepare to decelerate following the normal habits.
2) The danger alarming distance (emergency braking critical distance) is set up without consideration of the driver′s reactive time and the preparative time.When the driver is alarmed,he has been ready to brake.Secondly,it should prevent frequent warning from disturbing the normal operation of the driver.
3) The model should be able to reflect the most dangerous situation of cars under different motion state,and has good robustness to judge the dangerous distance underdifferent conditions.
2.2Overviewofautomotivecollisionmodel
In order to ensure driving safety,the car which is at high speed on the highway must keep a certain distanceSfrom the front vehicle.The anti-collision system based on the size of the distance between the two vehicles is divided into three stages:namely remind distanceSt,alarming distanceSw,and forced braking distanceSd.In the same situation the expressions are as follows:St>Sw>Sd.When the distance between test car and the car in front is in remind distanceSt,the range finder will issue a warning signal to remind the driver that the distance between two vehicles is too short.At this time the driver has enough reactive time to hear the reminding calm and be ready to slow down according to normal habits.When the distance between test car and the car in front is within reminding alert distanceSw,there is a risk factor of two vehicles,which is relatively low.After hearing the alarm,the driver should be vigilant and pay attention to the situation of the front car to ensure the safety of driving.When the distance between test car and the car in front is in alert distanceSd,the risk factor is high,and the driver has no enough time to make a judgment.The system will exceed the driver,because the vehicle will be forced to send a deceleration signal and decrease the car′s speed to increase the distance between two cars,which reduces the driving risk factor.
2.2.1 The oretical analysis of braking distance
In order to determineSt、Sw、Sd,the specific values of three kinds of distance in the braking model,we need to analyze the condition of two vehicles during braking,through calculation the distance needed in the process of braking to determine the collision risk.For car in the actual car braking process,in case of the tire does not lock up,the braking resistance comes from the friction between the tire and the ground,and the friction depends on the friction coefficient.From energy conservation we can get power of friction force on the body which is equal to the variation of the kinetic energy of the object:μNS=1/2 mv2,whereNis the number of cars on the ground pressure,μis the ground friction coefficient for car,Sis the braking distance,mis the mass of the car,vis the speed of the car,and the pressure of car to the ground is equal to the gravity of the carF=mg,so that we getmgμs=1/2mv2,namelys=v2/(2μg).
The common accident on the highway happens since the speed of the car behind is higher than the car front.In this condition the distance between the two cars is too short with a greater risk.Assuming there are two cars on the coincide road,the car behind isA,the speed ofAisva,the car front isB,the speed ofBisvb,va>vb,and the distance between two cars isS.The braking distance of the two carsis as follows:
(1)

(2)
IfSis greater thanSa,in this case,even if the vehicle in front instantaneously stops due to the occurrence of an accident,the car behind also has enough distance to brake until stop.So we consider the distance between the two cars,and the risk coefficient is
(2μg).
(3)


(4)
2.2.2 Numerical value determination
Anti-collision system not only must remind the driver in relatively safe distance between vehicles,but also can′t send a wrong braking signal,which can affect the normal driving,so we can reference the increase of risk to determine the set.
2.2.2.1 The setting ofSt
There is Maintain Safe Distance principle in the safe driving knowledge that people should maintain a distance for one over one thousand of the driving speed.For example,the car′s speed is 50 km/h,we should keep the 50 m distance,and the speed is 120 km/h,we should keep the distance 120 m.We will base on the basic driving knowledge to set the remind distance asSt=vt
2.2.2.2 The setting ofSw

2.2.2.3 The setting ofSd
It will be dangerous,if the driver does not make the braking measure.We will put the risk factor of 0.5 for safety reasons,so we setSdas the distance betweenS0andS1,whereSd=(S0+S1)/2.
2.2.3 Perfection and verification of the model
2.2.3.1 Delay consideration
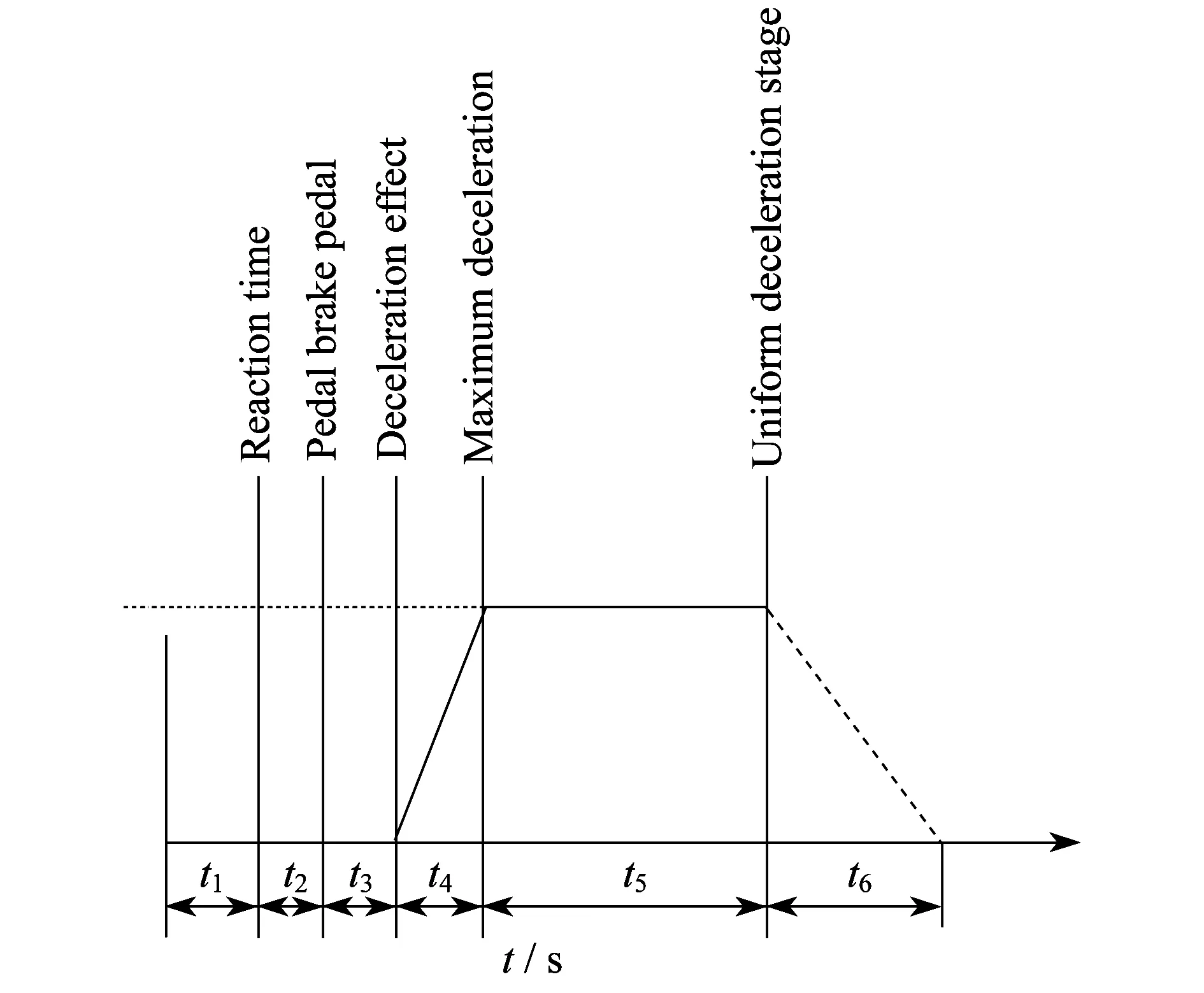
Figure 2 Vehicle braking reactive time
Refer to Fig.2,the reactive time is 0.2 s or more,if we consider the reactive time of the car ast2+t3,usually the total time required is about 0.5-0.6 s.Because of safety,we will sett2+t3as 1 s.The time required is short and can be used as the reactive time of the vehicle braking system.ThenSt,Sw,Sdneed to increase the delay distancet×va.
2.2.3.2 Velocity difference coefficient
If two cars running at a larger speed,such as the speed of the vehicle in is 0 km/h,another car is 50 km/h,then it will appear the extreme situations0=s1,when the absolute safety distance is not enough,under this circumstance we need a speed difference coefficient to guarantee to give the driver a judgment.In this model,we introduce a speed difference coefficientkv=1+0.8(vref/va),vrefis the relative speed of two vehicies,the speed difference coefficient will be based on the two car speed difference,the safety factor has been increased from 1 to 1.8.
2.2.3.3 Friction factor
Since the braking distance is inversely proportional to the friction factor,the reminder distance is also related to the coefficient of friction,soStshould increase the ratio of the friction factor.As the friction factor is generally around 0.8,so the coefficient is set to 0.8/μ.
2.3Finalbrakingmodel
After the perfection of the model,we can locate the three deceleration phases
St=va(0.8/μ)+vat,
(5)
(6)

(7)
wherei=1,whenva>vb;i=0,whenva Figure 3 Three-dimensional map of the braking distance Figure 4 Program flow chart The program consists of a main program and Ultrasonic Ranging procedures[7].The main program is to complete the system initialization,load anti-collision algorithm and set LED alarm.Ultrasonic distance measurement program is to complete the transmission and reception of ultrasonic wave and obtain the distance between the ultrasonic transmitter and the obstacle.AVR microcontroller and ARM development board transmits data through Universal Synchronous/Asynchronous Receiver/Transmitter (USART).Program flow chart is shown in Fig.4. 3.1Mainprogramdesign Firstly,Ok6410 development board implement module performs initialization,including a LED driver initialization and serial receiving procedures,through the way of interrupting to receive ultrasonic range data which is sent by AVR microcontroller.Thus the data are substituted into the alarming algorithm as alarming information,then the information is written to the LED driver to complete alarm. 3.2Ultrasonicrangingprogram The ultrasonic launch program initializes the initial parameter,and then sends the 15 kHz ultrasonic pulse signalper 60 ms.By comparison with the timer,the time of delay of sending ultrasonic signalis 50 ms.So we enable the interruption and initialize the timer to wait for the signal.Only when the echo is received,the waiting program is shut,the interruption is off and the timer starts to count.Otherwise,the waiting program continues.According to the difference between the read echo and the transmitted wave,the distance is calculated every 1s.The actual measurement results are shown in Table 2. Table 2 Actual measurement result In this paper,the ultrasonic distance measurement device obtains travel distance between vehicles and calculates the speed information about the front vehicle,then using the computer to simulate the speed of the current car.The distance from the two vehicles that will speed the automotive anti-collision warning information were substituted into the model.System design is mainly dominated by the ultrasonic ranging.It calculates the traffic data by the analysis of theory and practice and ARM processor.At the same time,it uses LED light to send alarming information for the automobile anti-collision.With the improvement of the system,it will be used more widely. [1] Zeng Y.Research on automotive anti-collision warning system based on ARM+FMCW radar [D].Guangzhou:South China University of Technology,2011. [2] Pi W B.Research on automobile anti-collision system based on ARM [D].Wuhan:Wuhan University of Technology,2009. [3] Pan Z M.A large range of ultrasonic distance measurement system [D].Beijing:National University of Defense Technology,2006. [4] Tai Y N,Hu G,Chen X P.Based on ARM embedded vehicle monitoring terminal design and implementation [J].Computer Measurement and Control,2008,16(8):1125-1126,1140. [5] Zhao X C.Key techniques research on radio frequency of high precision radar ranging system [D].Nanjing:Nanjing University of Science and Technology,2014. [6] Li C D.Anembedded system key technology analysis and the development and application [J].Heilongjiang Science,2014(2):30-31. [7] Huang M Z.Research of steaming media transmission system based on 3G [D].Guangzhou:Guangdong University of Technology,2013. (责任编辑:包震宇) 基于超声波的汽车防撞系统 祁琴琴, 张保森,赵梗明*,沈丹来 (上海师范大学 信息与机电工程学院, 上海200234) 在现有的汽车防撞系统中,主要都是使用雷达进行测距,这类系统的价格较高,不能大面积推广.在现有的汽车防撞系统上优化测距算法,采用超声波传感器进行测距,建立相关的防撞模型,根据不同的测量距离发出不同的报警信息.实验结果表明,在一定范围内报警信息准确. 汽车防撞系统; 超声波传感器; 测距算法 date:2016-06-22 TP368Documentcode: AArticleID:1000-5137(2017)04-0577-07 Biography: Qi Qinqin (1991-),female,master,research area:embedded systems development and applications.E-mail:1254880801@qq.com *Correspondingauthor: Zhao Gengming (1960-),female,assistant professor,research area:embedded systems development and applications,application of microcomputer.E-mail:gengming@shnu.edu.cn
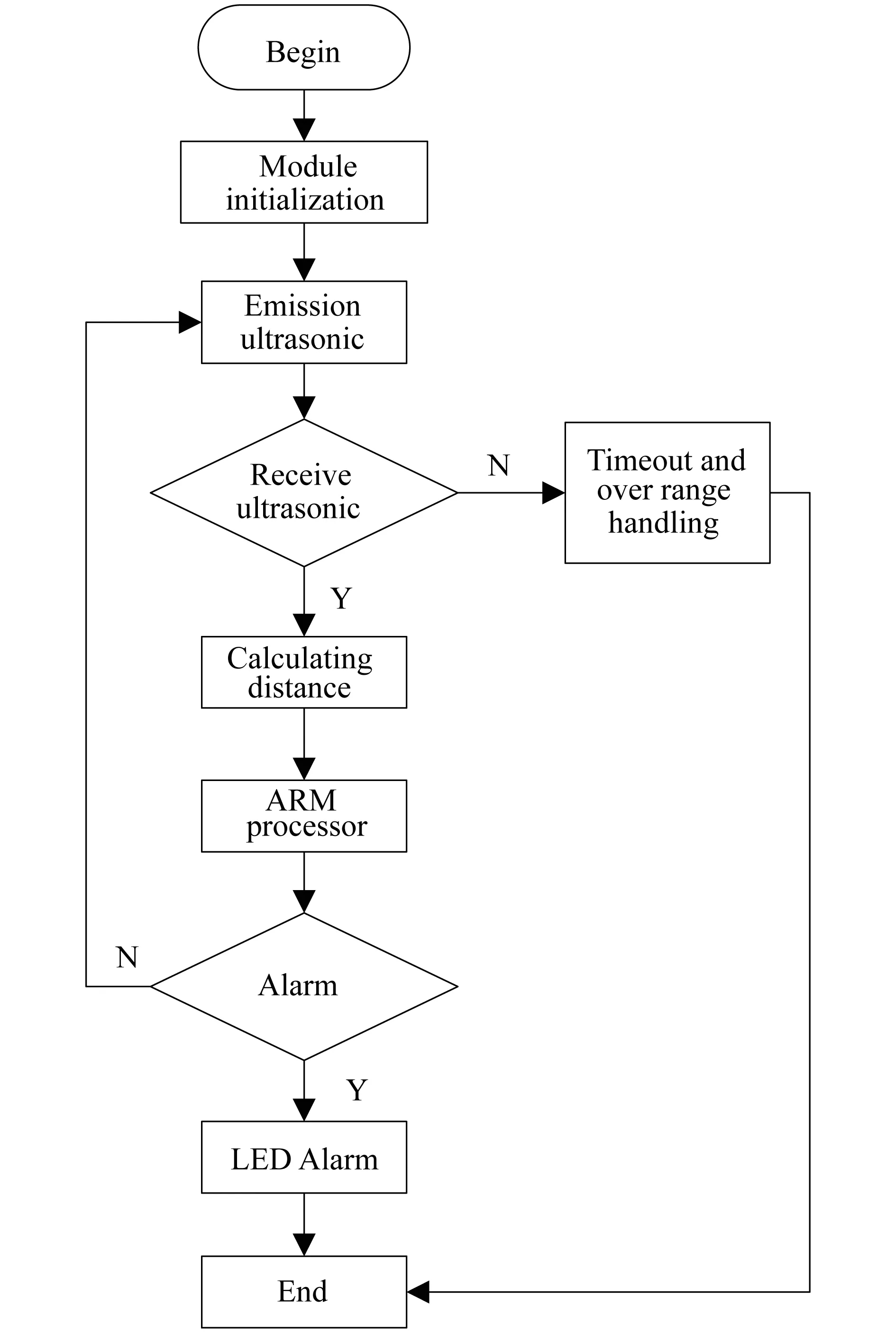
3 System software design