基于微多普勒特性的旋转对称进动目标的ISAR干扰技术
2017-09-16袁乃昌
李 征,王 超,袁乃昌
(国防科技大学电子科学学院,湖南 长沙 410073)
·工程应用·
基于微多普勒特性的旋转对称进动目标的ISAR干扰技术
李 征,王 超,袁乃昌
(国防科技大学电子科学学院,湖南 长沙 410073)
从旋转对称进动目标运动特性出发,给出了一种生成逆合成孔径雷达(ISAR)欺骗式干扰信号的新方法。干扰机根据这种旋转对称进动目标模型实时计算目标的微动量和强散射点的RCS,并依次对接收到的雷达信号在频率域进行调制转发,生成具有微多普勒特征的虚假目标,实现对敌方雷达系统的欺骗干扰。根据旋转进动目标模型,实时计算干扰机和虚假目标的位置,产生具有真实运动轨迹平面虚假目标,从而实现对基于轨迹平面识别真假目标雷达的有效对抗。仿真结果表明,该方法能够逼真地生成ISAR欺骗式干扰信号。
空中进动目标;微多普勒特性;ISAR;RCS
0 引言
弹道导弹在现代战争中具有威慑力作用,弹道导弹防御系统的研究得到了越来越多的关注,而有效解决目标识别技术一直是其核心问题之一。逆合成孔径雷达(ISAR)能够对目标进行二维高分辨成像,获得目标的结构特性和散射中心分布特性,因此ISAR被广泛地应用于弹道导弹防御系统中。为了保护弹道导弹目标,如何有效地对ISAR系统进行干扰逐渐成为电子对抗的一个重要研究内容。
针对ISAR的有源干扰可分为压制式干扰和欺骗式干扰。压制式干扰直接向雷达发射噪声信号,其原理简单,但是由于ISAR本身具有很高的信号处理增益,过低的干扰功率难以实现对图像的有效覆盖,因此对于弹道导弹的伴飞式干扰机,多采用欺骗式干扰。文献[1]提出了基于数字图像合成(DIS)技术的ISAR假目标干扰生成方法;有些文献对多假目标的产生方法进行了研究;还有文献提出了基于干扰机接收的ISAR信号和目标实时回波信号之间的相位关系,采用补偿调制的方法来实现ISAR欺骗干扰。在干扰机与目标开始分离时,其位置与目标相同,其姿态和速度参数已知,根据空中目标的运动模型,实时计算得到干扰机位置。对于空中目标,其不仅具有整体的平动,还具有由于进动引起的微动特性[2]。微动对雷达回波的调制效应可体现在RCS序列、回波多普勒谱、回波功率谱以及高分辨成像结果中。结构不同的目标拥有不同的微动特性,目标的微多普勒在雷达回波中是唯一的。
1 欺骗干扰信号生成原理
假设ISAR雷达发射LFM信号
(1)
式中,tr是快时间,T是脉宽,fc是发射信号载频,K=B/T是LFM信号调频率,B是发射信号带宽。
为了实现对ISAR雷达有效的欺骗干扰,需要在空中产生K个假目标,且第k个假目标含有Pk个散射点。假设第k个假目标的第p个散射点与雷达之间的瞬时斜距为Rk,p(ta),如果干扰机与雷达之间的瞬时斜距为RJ(ta),其假目标各个散射点与雷达之间的瞬时距离Rk,p(ta)与RJ(ta)之差为ΔRk,p(ta)。
干扰机截获的雷达信号为:
exp(-j(4π/λ)RJ(ta))
(2)
雷达接收到的K个假目标的回波信号为:
ST(tr,ta)=SJ(tr,ta)⊗hJ(tr,ta)
(3)
式中,hJ(tr,ta)为调制函数。
根据卷积性质,干扰信号ST(tr,ta)的傅里叶变换可以表示为:
ST(fr,ta)=SJ(fr,ta)HJ(fr,ta)
(4)
通过对式(4)进行逆傅里叶变换,就可以得到含有多个欺骗假目标的干扰信号ST(tr,ta)。
要实时产生干扰信号,关键之一是要实时计算得到瞬时距离差ΔRk,p(ta)和散射系数σk,p。
2 空中进动目标运动模型[3-4]
空中刚体目标的进动可以分解为两部分:目标绕某旋转中心的转动及该中心的平动。第k个目标上单个散射中心p而言,在时刻ta,其到雷达的距离为:

(5)

ΔRk,p(ta)=ΔRk,o(ta)+rk,p(ta)
(6)
式中,ΔRk,o(ta)表示目标平动引起的距离差。根据式(6)可知,可以分两部分计算得到距离差ΔRk,p(ta):平动调制ΔRk,p(ta)和微动调制rk,p(ta)。
2.1 平动调制
建立如图1所示坐标系,OxIyIzI为地心惯性(ECI)坐标系,其坐标原点在地心O,OxI轴在赤道平面内指向平春分点,OzI轴垂直于赤道平面,与地球自转轴重合,指向北极,OyI轴的方向是使得该坐标系成为右手直角坐标系的方向。OxFyFzF为地心(EC)坐标系,EC坐标系是一个相对地球固定的坐标系,其坐标原点在地心O,OzF在赤道平面内指向格林威治天文台所在的子午线,OzF轴垂直于赤道平面指向北极,OxFyFzF组成右手直角坐标系。
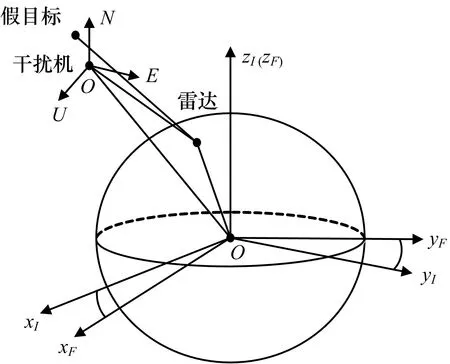
图1 ECI与EC坐标系
在任何时刻ta,干扰机到雷达的距离为:
(7)
第k个假目标质心到雷达的距离为:
(8)
2.2 转动调制
首先讨论只有一个假目标的情况。许多空中目标都有规则的形状,比如球形、圆柱形和圆锥形。在本文中把空中目标等效为平底锥柱体[5],其模型如图2所示。理论计算和试验测量表明,在高频区,目标的电磁散射可以等效为某些局部位置上的多散射中心的电磁散射。
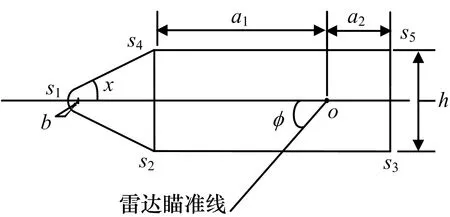
图2 假目标模型
以干扰机为原点,建立如图3所示空间坐标系,Oxyz为假目标速度坐标系,Oy轴为飞行方向,且为假目标进动轴,OXYZ为假目标本体坐标系。
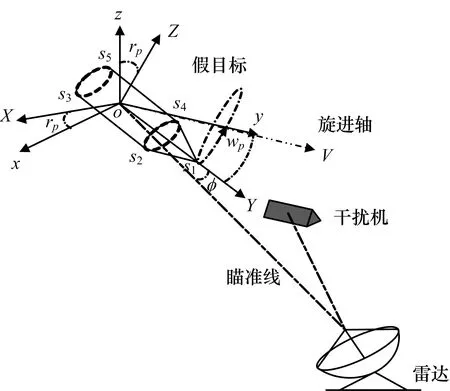
图3 干扰机、假目标与雷达的几何关系
(9)

(10)
OY轴和视线方向的夹角φ为:
(11)
根据几何结构,可以得到:
(12)
散射中心S1、S2S4、S3S5在LOS上的微动调制为:

(13)
3 散射点RCS计算
当π>φ>0时,各个散射点的RCS可以根据下式[6]计算:
(14)
式中,k0=2π/λ是波速,λ是波长,d1=1+χ/π,d2=3/2。从式(14)中,可以看出锥顶散射点S1的RCS是固定不变的,其他散射点的RCS随着入射角φ的变化而变化。可以根据式(11)得到入射角,然后实时计算各散射点的RCS。
4 仿真验证

图4和图5分别展示了干扰机和假目标的高程和在ENU坐标系中的运动轨迹。图6展示了干扰机与雷达和假目标与雷达的距离之差与时间关系,可以看出,两者的距离差并非固定不变,是随时间变化而变化。因此在模拟产生ISAR干扰回波时,采用一个固定延时来调制侦收到的雷达信号并转发形成干扰目标,通常情况下欺骗假目标形成的雷达轨迹会偏离地心的真实轨迹平面。
图4 高程
图5 运动轨迹
图6 距离之差与时间关系
图7是假目标进动轴与雷达视线方向的夹角随时间的变化曲线。可以看出,由于假目标在做周期性的进动运动,夹角也随着时间出现周期性的变化。图8和图9分别是假目标各散射点的微动和RCS随时间的变化曲线。从图8中可以看出,假目标各散射点的微动随着时间的周期变化的同时,其大小随着时间也出现变化,这是由于假目标进动轴与雷达视线方向的夹角的变化引起的。在图9中可以看出散射点S1的RCS是固定的,不随时间变化而发生变化,其他散射点的RCS会随时间的变化而变化,特别是对于散射点S3和S5而言,在一段时间内为零。以上仿真结果与理论分析相符合。
图7 进动轴与雷达视线夹角
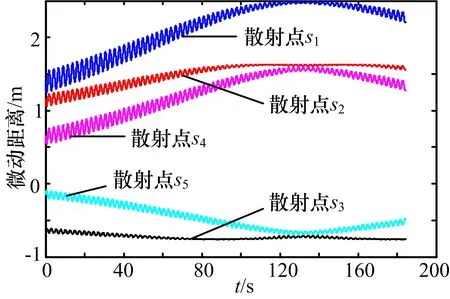
图8 假目标散射点微动变化
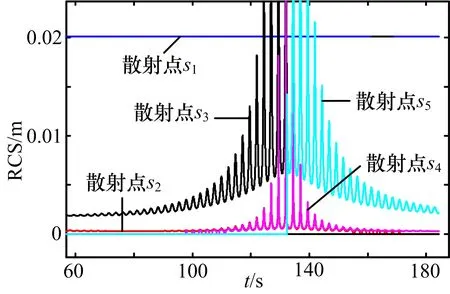
图9 假目标散射点的RCS变化
图10~12分别是对61s、122s和184s的产生假目标欺骗干扰信号的ISAR成像结果。从中可以看出不同时刻对假目标的ISAR成像结果是不同的,在61s时,雷达只能照射到散射点S1、S2和S3;在122s时,雷达只能照射到散射点S1、S2、S3和S4;在184s时,雷达只能照射到散射点S1、S4和S5。
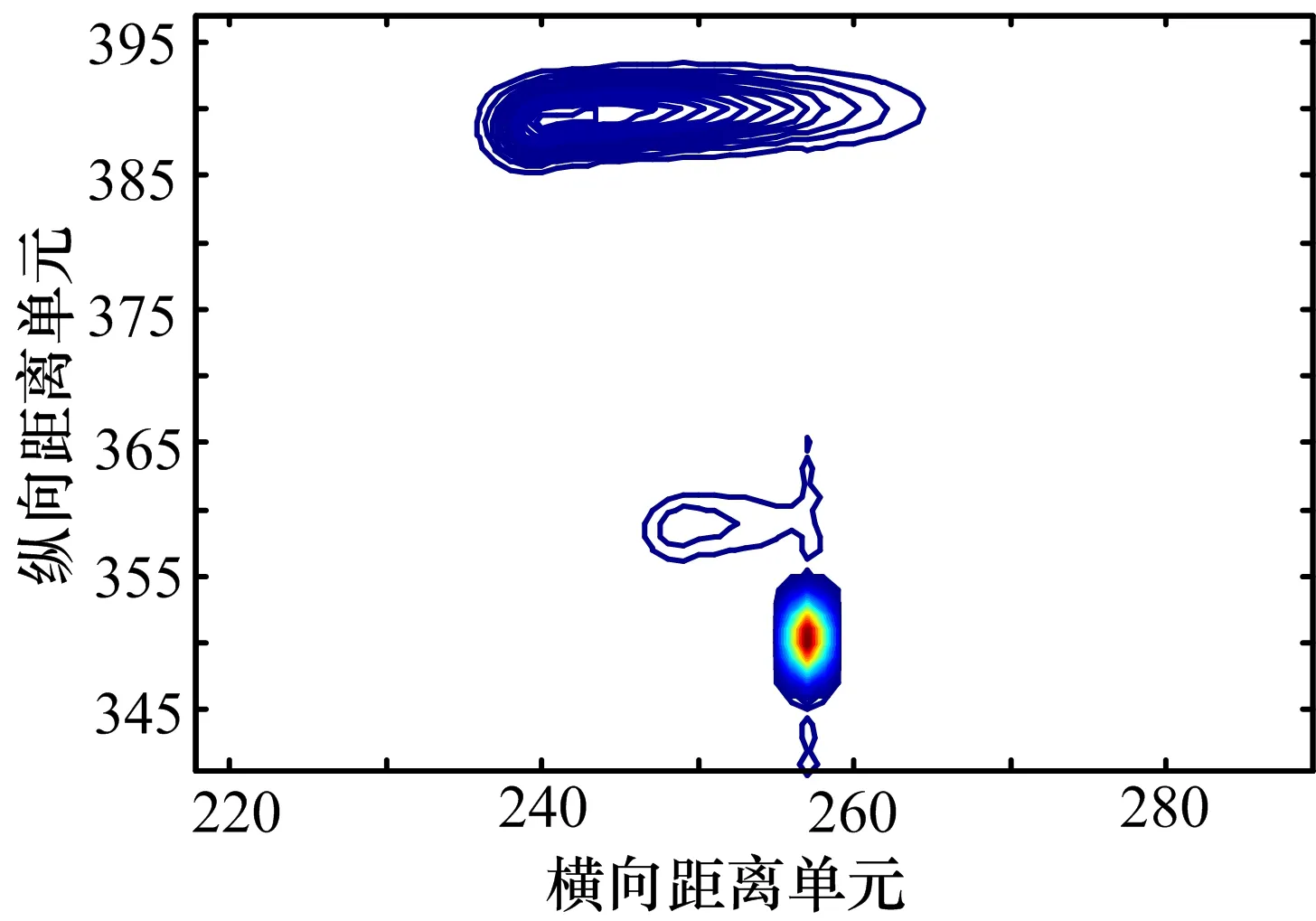
图10 61s时成像结果
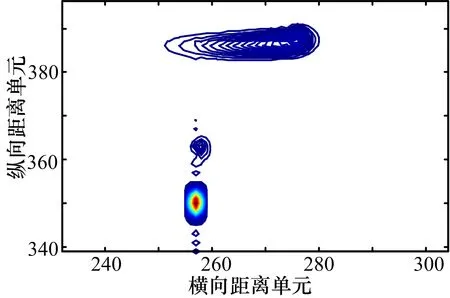
图12 184s时成像结果
5 结束语
本文针对基于微多普勒特征和运动轨迹特征识别空中真假目标的雷达,提出了一种新的ISAR欺骗干扰信号产生方法。根据空中目标的运动模型,实时计算干扰机和假目标的空间位置,同时利用假目标模型和进动模型,实时计算假目标的微动量和强散射点的RCS,根据实时计算得到的参数,依次将接收到的雷达信号在频率域进行调制处理后转发,产生同时具有微动特性和真实运动轨迹的假目标的雷达回波信号,实现对ISAR的欺骗式干扰。仿真结果表明,该方法有效可行。■
[1] Pace PE, Fouts DJ, Ekestorm S. Digital false-target image synthesizer for countering ISAR[J]. IEE Proc.Radar Sonar Navig., 2002, 149(5):248-257.
[2] Gao Hongwei, Xie Lianggui, Wen Shuliang, et al. Micro-Doppler signature extraction from ballistic target with Micro-Motions[J]. IEEE Trans. on Aerospace and Electronic Systems, 2010,46(4):1969-1982.
[3] 赵艳丽, 周颖, 王雪松, 等.基于动力学模型的有源假目标鉴别方法[J].国防科技大学学报, 2007, 29(5): 60-65.
[4] Lü Wentao, Wang Junfeng, Yu Wenxian.Simulation of echoes from ballistic targets[J].IEEE Antennas and Wireless Propagation Letters, 2014,13:1361-1364.
[5] Pan Xiaoyi, Wang Wei, Liu Jin, et al. Modulation effect and inverse synthetic aperture radarimaging of rotationally symmetric ballistic targets with precession[J].IET Radar Sonar Navig., 2013, 7(9):950-958.
[6] Wang T, Wang X, Chang Y, et al.Estimation of precession parameters and generation of ISAR images of ballistic missile targets[J].IEEE Trans. Aerosp. Electron. Syst., 2010, 4 (4):1983-1995.
ISAR jamming techniques based on micro-Doppler characteristics of rotational symmetrical precession targets
Li Zheng, Wang Chao, Yuan Naichang
(National University of Defense Technology, School of Electronic Science, Changsha 410073, Hunan, China)
From the target motion characteristics of rotational symmetrical precession, a new method of the generation of inverse synthetic aperture radar (ISAR) of deception jamming signal is provided. The jammer according to the rotational symmetrical precession target model, the strong scattering points of the RCS are real-time calculated,and sequentially
radar signal for forwarding modulation in frequency domain, the false targets are generated with micro-Doppler characteristics,the jamming to enemy ISAR radar system are implemented. According to the rotational precession of the target model, the jamming and false target position are real-time calculated, which has the real trajectory of planar false targets, thus realizing the effective against radar target recognition based on trajectory plane. The simulation results show that the proposed method can generate ISAR deceptive jamming signal.
rotational symetrical precession target; micro-Doppler characteristics; ISAR; RCS
2017-05-16;2017-07-06修回。
李征(1992-),男,硕士研究生,主要研究方向为微波毫米波制导与对抗。
TN974
: A