基于液压驱动的足式机器人液压缸设计方法研究
2017-09-15吴艳花王克楠
吴艳花,王克楠
(1.湖北文理学院机械与汽车工程学院,襄阳 441053;2.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001;3.汽车零部件制造装备数字化湖北省协同创新中心,襄阳 441053)
基于液压驱动的足式机器人液压缸设计方法研究
吴艳花1,3,王克楠2
(1.湖北文理学院机械与汽车工程学院,襄阳 441053;2.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001;3.汽车零部件制造装备数字化湖北省协同创新中心,襄阳 441053)
足式机器人以其良好的地面适应能力吸引了众多学者研究。然而足式机器人的驱动方式不尽相同,液压驱动因其输出力大响应速度快逐渐成为足式机器人主要采用的驱动方式,因此液压系统驱动器的设计就显得十分关键。本文介绍了足式机器人液压缸驱动器设计方法。首先通过Adams建立机器人虚拟样机平台,并通过Matlab搭建机器人控制系统,然后进行联合仿真实验,通过仿真实验得到液压缸设计参数。根据所得到的液压缸设计参数,经过公式计算得到液压缸结构设计参数,进而进行液压缸结构设计和伺服阀选型。最后对所设计的液压缸进行有限元分析,使其满足机器人工作要求。
足式机器人;液压驱动;联合仿真;有限元分析
0 引言
足式动物在自然界许多地形中展现出良好的运动能力,它们通过间歇性的足地接触以及高效的落足点调节能力跨过障碍,穿越沟壑,并且表现出良好的稳定性。因此,越来越多的学者将目光投向了足式机器人的设计研发。足式机器人腿部结构通常由杆件和旋转关节组成,这样的结构设计基于仿生学的研究,因此与使用轮子的传统机器人相比,足式机器人的优点在于可以很容易适应不规则地形[1]。并且足式机器人因其地面适应能力在航天探索领域有着很好的应用前景。
1968年,Liston和Mosher研制了一款足式车辆[2]。该车辆高3.3米,长度约为3米,重约为1400公斤。每个腿部关节由液压缸驱动,整体由68KW内燃机驱动,然而机器人的控制需要由训练有素的操作员来完成,操作员通过控制操作杆和脚踏板由力反馈到液压缸来驱动机器人,然而复杂的操作方式使操作员十分疲惫,很少有人能够方便容易的控制机器人。
Matsuoka首先研制了单腿机器人,他的目标是模拟人类运动中的循环跳跃[3]。为了实现这一目标,Matsuoka制定了一个由身体和失重腿组成的模型,并认为与飞行阶段相比,着地阶段的时间更短。Raibert 也致力于足式机器人的研究,他研制了一款单腿机器人,这款机器人需要不断地进行弹跳以保持平衡[4]。整个机身包括了运动所需要的执行机构以及操作机构,腿部可以通过其腿部轴线安装的直线弹簧进行伸展压缩运动,这款机器人被限制在一个平面上,因此只可以做前后上下以及矢状面内的旋转运动。Raibert研究的三分控制法成功的应用到足式机器人中,并表现出良好的动态稳定性,机器人最快速度可以达到2.2m/s。并且Raibert及其团队成员基于单腿机器人的研究成果研制了基于液压驱动的双足以及四足机器人,同样表现出了良好的动态稳定性。
足式机器人驱动方式目前主要采用电机驱动或者液压驱动。液压驱动以其输出力大和响应速度快等优点逐渐成为足式机器人通常选用的驱动方式[5]。然而,足式机器人表现出的复杂的动态现象,使得对其分析和控制变得困难,而驱动器的设计选型对足式机器人系统控制来说就显得尤为重要。
因此本文的研究工作主要集中在以下三个方面:1)搭建足式机器人单腿子系统虚拟样机,定义模型属性,通过Adams-Matlab进行足式机器人单腿子系统跳跃仿真实验,通过仿真实验得到液压缸设计参数;2)根据仿真实验得到的液压缸设计参数经过计算进行液压缸设计以及伺服阀的选型工作;3)对本文所设计的液压缸进行有限元分析,保证设计的液压缸满足强度要求。
1 足式机器人单腿子系统仿真实验
通过Adams建立单腿子系统虚拟样机模型,如图1所示,该机器人腿部结构有髋关节和膝关节两个自由度,整个机器人由机身,大腿,小腿,液压缸以及连杆机构所组成,机器人由位于机身的两个并联液压缸驱动,液压缸近似水平竖直布置。
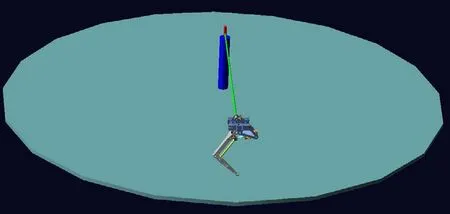
图1 机器人虚拟样机

表1 单腿子系统机器人样机参数
单腿子系统虚拟样机各关节构件参数如表1所示。
本文应用Matlab/Simulink模块搭建机器人控制系统,如图2所示。Adams模块与控制模块互相传输数据,控制模块输入Adams模块控制信号,Adams输出控制模块所需的状态参数。
通过仿真实验得到本文液压缸设计所需的数据结果,水平液压缸和竖直液压缸受力情况以及机器人足端轨迹如图3所示。从仿真结果可以看出水平液压缸受力最大约为 6000N,竖直液压缸约为 8000N,根据液压缸受力情况以及机器人的足端轨迹,接下来对液压缸进行设计选型工作。

图2 机器人控制系统
2 液压缸设计以及伺服阀的选型
由于液压缸经常做等速往复运动,根据液压缸受力情况以及机器人运动范围,本文选用双出杆液压缸。首先确定液压缸工作压力为16Mpa,然后确定液压缸缸筒内径,考虑到减重要求,本文选用缸筒内径为28mm。然后根据液压缸受力情况选择液压缸活塞杆直径。根据仿真结果,水平液压缸最大受力6000N,竖直液压缸最大受力8000N,则液压缸活塞杆直径计算公式如下:

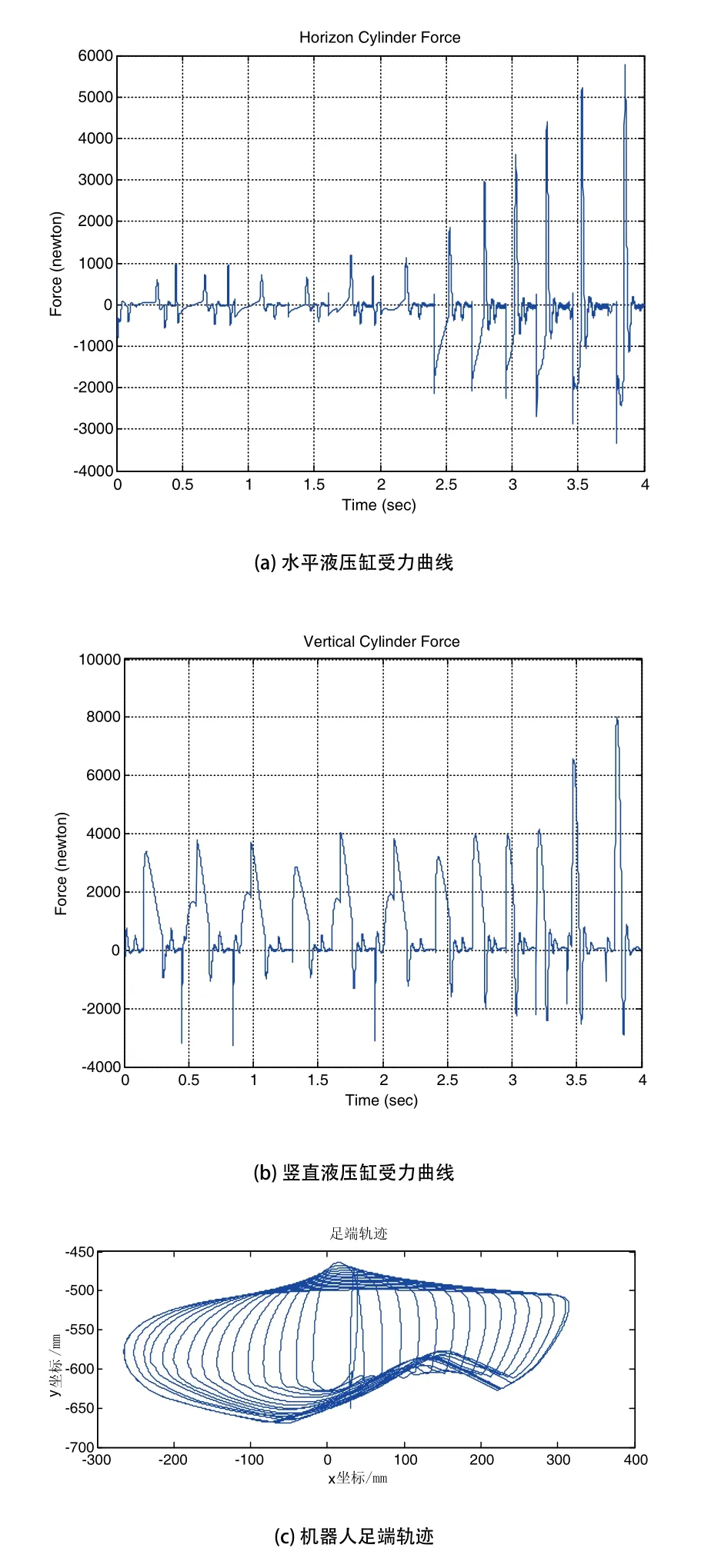
图3 机器人仿真结果
其中,D为液压缸缸筒内经,d为活塞杆外径,ps为工作压力,Fmax为液压缸所受最大力。
计算得到竖直液压缸活塞杆直径12.2mm,水平液压缸活塞杆直径为17.5mm,根据液压缸活塞杆直径国家系列标准,经过圆整,本文竖直液压缸活塞杆直径选用12mm,水平缸选用16mm。
然后根据机器人足端轨迹计算得到液压缸行程,设机器人足端轨迹为根据运动学解算得到水平与竖直液压缸铰接点坐标为设水平液压缸与机身连接点坐标为竖直液压缸与机身连接点坐标为则水平与竖直液压缸长度计算公式如下:
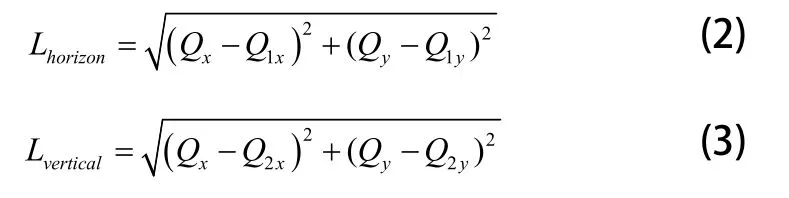
根据计算结果得到水平液压缸行程为112mm,竖直液压缸行程大约43mm。
接下来进行液压缸伺服阀的选型工作。液压缸的选型主要根据液压缸的流量来选取。下面本文分别根据公式(4)计算水平竖直液压缸空载流量。

其中,Q0为空载流量,As为液压缸面积,vmax为液压缸最大速度。
因此,计算液压缸流量必须知道液压缸的速度,本文从仿真实验中得到液压缸速度如图4所示。
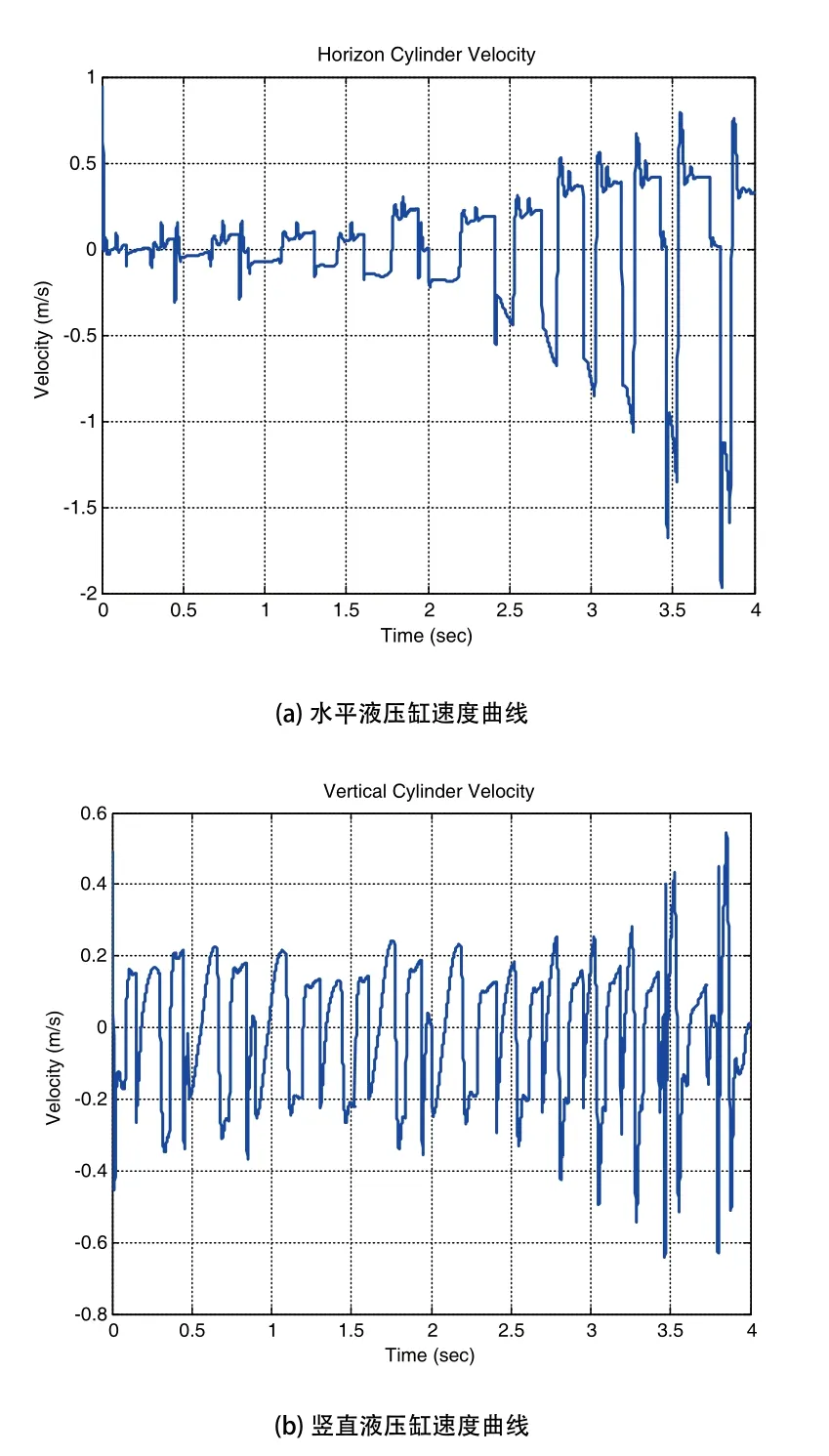
图4 液压缸速度曲线
由上述仿真实验结果可知,水平液压缸最大速度约为2m/s,根据公式(4)得到水平液压缸最大空载流量为86L/min,竖直液压缸最大速度为0.65m/s,根据公式计算得到最大空载流量为34L/min。
根据计算得到的液压缸流量,查找液压缸伺服阀手册,本文选用型号为HY150电液伺服阀,如图5所示。

图5 HY150电液伺服阀
根据计算得到的液压缸参数以及选用的伺服阀进行液压缸结构设计,分别设计了水平液压缸与竖直液压缸,如图6所示。
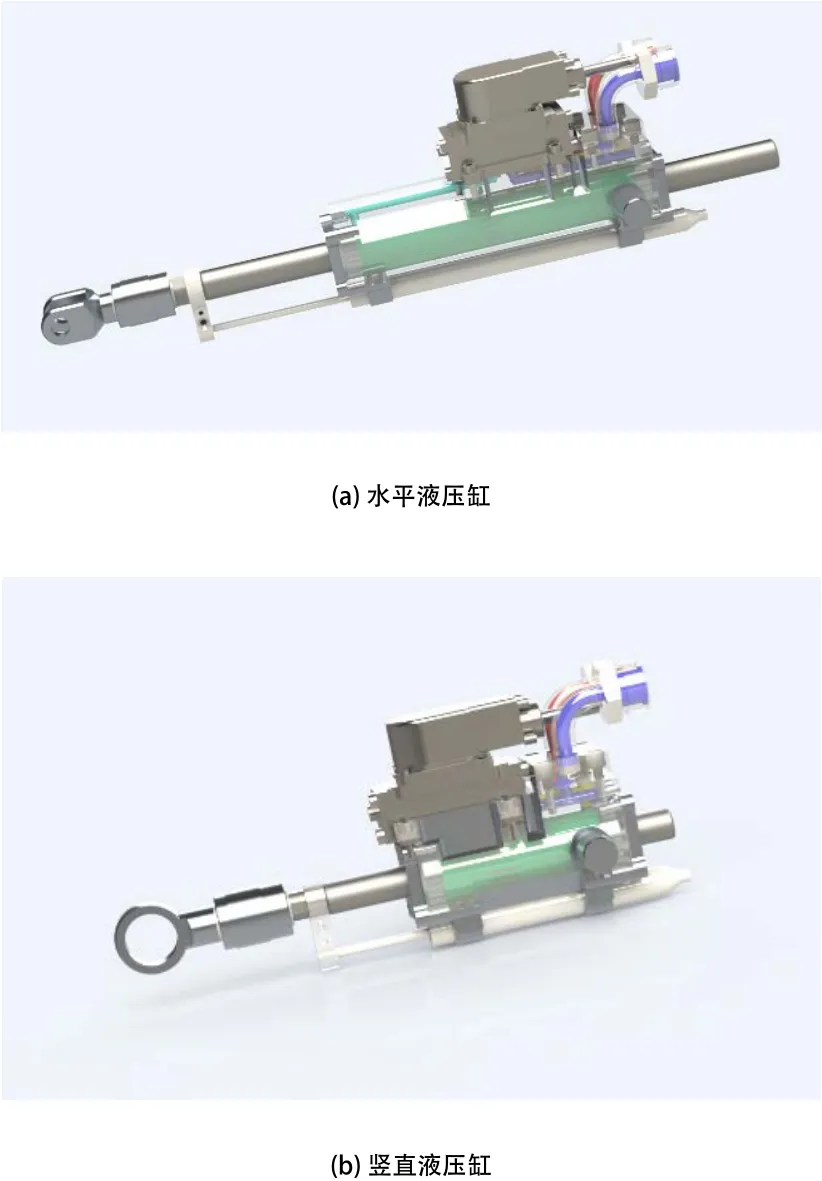
图6 液压缸三维效果图
3 液压缸有限元分析
为保障本文设计的液压缸满足强度要求,对液压缸进行有限元分析。本文所设计的液压缸材料选用铝合金7079。水平液压缸工作压力为16Mpa,最大推力为6000N,竖直液压缸工作压力16Mpa,最大推力为8000N。仿真结果如图7所示,从图中可以看出水平液压缸最大应力为116Mpa,竖直液压缸为119Mpa,均小于铝合金
7079的200Mpa屈服极限,所以液压缸设计满足强度要求。
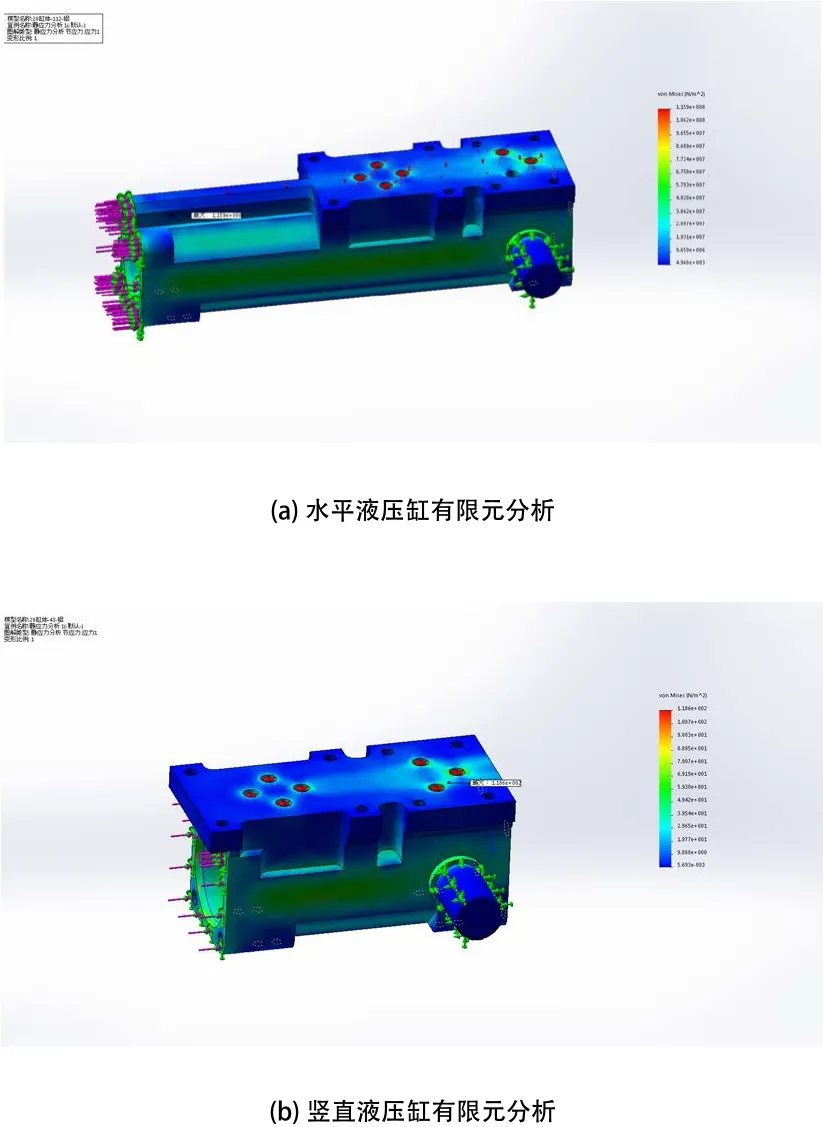
图7 液压缸有限元分析结果
4 结论
本文介绍了足式机器人液压缸设计方法,首先提出了建立足式机器人虚拟样机,然后编写机器人控制算法,最后进行联合仿真实验,从而得到机器人液压缸设计参数。然后提出了根据所得到的参数数据,经过计算转换成液压缸结构设计参数,从而进行液压缸结构设计,最后经过有限元分析,证明所设计的液压缸满足强度要求。
上述本文所提出的液压缸设计方法对足式机器人领域液压缸设计选型具有指导意义。
[1] Li Y, Ding L, Liu G.Attitude-based dynamic and kinematic models for wheels of mobile robot on deformable slope[J].Robotics & Autonomous Systems,2016,75:161-175.
[2] Montes H, Armada M. Force Control Strategies in Hydraulically Actuated Legged Robots[J].International Journal of AdvancedRobotic Systems,2016,13:1.
[3] Baek S, Park J, Joo Y, et al. Dynamic modeling and control of hopping robot in planar space[J].Intelligent Service Robotics,2016,9(2):153-161.
[4] Uyanik I, Morgul O,Saranli U.Experimental Validation of a Feed-Forward Predictor for the Spring-Loaded Inverted Pendulum Template[J]. IEEE Transactions on Robotics,2015,31(1):208-216.
[5] Semini C, Barasuol V,Boaventura T, et al. Towards versatile legged robots through active impedance control[J].International Journal of Robotics Research,2015,34(7):1003-1020.
[6] XU Yilin,GAO Feng,PAN Yang.Method for Six-Legged Robot Stepping on Obstacles by Indirect Force Estimation[J].Chinese Journal of Mechanical Engineering,2016,04:669-679.
[7] 刘亮.大型重载六足机器人行走技术研究[D]. 哈尔滨工业大学,2013:1-4.
[8] 蒋序帆.基于阻抗控制的重型六足机器人柔顺控制研究[D].哈尔滨工业大学,2016:1-5.
Study on the design of hydraulic cylinder based on hydraulically actuated legged robot
WU Yan-hua1,3, WANG Ke-nan2
TP242.6
:A
:1009-0134(2017)08-0161-04
2017-06-26
吴艳花(1979 -),女,湖北天门人,讲师,硕士,研究方向为智能控制和数控技术。
