下肢康复外骨骼机器人步态相位切换研究
2017-09-15王美玲陈淑艳张鹏万
马 乐,周 平,王美玲,陈淑艳,张鹏万
(1.合肥工业大学 电气与自动化工程学院,合肥 230009;2.中国科学院合肥物质科学研究院先进制造技术研究所,常州 213164;3.中国科学技术大学 工程科学学院,合肥 230000)
下肢康复外骨骼机器人步态相位切换研究
马 乐1,2,周 平2,王美玲2,陈淑艳2,张鹏万3
(1.合肥工业大学 电气与自动化工程学院,合肥 230009;2.中国科学院合肥物质科学研究院先进制造技术研究所,常州 213164;3.中国科学技术大学 工程科学学院,合肥 230000)
为实现下肢康复外骨骼机器人步态相位的稳定切换,本文通过压力传感器,编码器,陀螺仪以及拐杖按钮检测单元构建的感知系统实时采集人体步态运动信息,先根据足底压力信号的标志性事件将人体步态周期依次序划分为四个相位,然后对不同相位的运动状态切换进行具体研究。针对人体行走过程中支撑腿与摆动腿的切换判断,提出基于学习矢量量化(LVQ)的神经网络模型。将整个步态相位切换模型嵌入控制程序中进行在线测试,结果表明该模型实时性好,识别率高,能够实现稳定柔顺的步态切换。
下肢外骨骼机器人;传感信号融合;相位划分;LVQ;步态相位切换
0 引言
外骨骼机器人是一种集人机工程学、仿生学于一体的机械装置,穿戴于人体肢体外侧,靠人的智慧来控制机器人,发挥机器人能量动力的优势,辅助人类完成自身无法完成的任务,广泛应用于医疗、军事、工业等领域[1]。康复用下肢外骨骼机器人能够帮助患者进行腿部康复训练,在可重复性方面优于传统方法,可以大幅度缩短患者的康复训练时间,并减少陪同康复的医师数量,大幅度降低人力成本。帮助老年人、下肢不便患者实现自主行走,改善他们的生活质量,有助于他们的身心健康。
目前下肢外骨骼机器人的研究仍然面临众多挑战,其中一个主要的挑战就是机器人缺乏充分的能力识别穿戴者的行为和意图。为了克服这个问题,研究者们采用惯性传感器[2]、足底压力传感器[3]和关节角度传感器[4]来获取穿戴者的运动信息,并通过模式识别的方法来检测穿戴者的步行状态与运动意图。Pappas I P I等人基于足底压力传感器和安装在踝关节的陀螺仪信号采用有限状态机的方法对足跟触地、支撑、足跟离地、摆动四个步态相位进行在线识别[5]。吴贵忠等人根据关节角度信息和足底压力分布信息分别采用支持向量机和非线性自回归神经网络模型来预测外骨骼机器人的步态相位[6]。Djuric M等人基于大腿、小腿和足部的加速度信息采用阈值法进行步态运动相位的识别[7]。
本文为实现下肢康复外骨骼机器人步态相位的稳定切换,使用足底压力传感器、陀螺仪、编码器和拐杖按钮检测单元构成实时感知系统,先通过阈值法模糊处理足底压力信号,将步态运动周期依次序划分为四个相位,然后对每个相位的运动状态切换进行了具体研究。此外,针对双支撑相位的支撑腿与摆动腿切换判断采用了学习矢量量化(Learning Vector Quantization,LVQ)神经网络模型。通过整个步态切换模型的在线测试,验证了模型的有效性。
1 采集系统结构
本文的信号采集系统主要由足底压力采集模块、陀螺仪模块、编码器、拐杖按钮信号检测模块和嵌入式PC主控制器模块组成,各个模块以节点形式挂载在CAN总线。
1.1 信号采集模块
足底压力信号采集模块的传感器采用Tekscan 公司的A401,在每一只脚底安装三个传感器,分别放置在第一跖骨、第五跖骨和足跟部位。模块的微控制器采用STM32F103,采集频率为100Hz,信号被控制器的12位A/D转换器采集后进行处理。陀螺仪模块由MPU6050和微控制器组成,集成了3轴MEMS加速度计、3轴MEMS陀螺仪以及数字运动处理器DMP。伺服电机编码器用于输出关节角度信息。拐杖按钮信号检测单元使用支持ZigBee协议的无线射频芯片CC2530F256将按钮信号通过2.4GHz的无线信道与主控器进行串口通信,同时拐杖的使用增加了人体的支撑点和支撑范围,提高了系统的稳定性和安全性。嵌入式PC主控器实时采集各个模块的传感信号进行融合分析,CAN总线的通信速率设为500Kbps。样机实物如图1所示。

图1 样机实物图
1.2 信号处理与特征提取
足底压力信号主要采用增益放大和二阶巴特沃斯低通滤波进行预处理。陀螺仪的输出信号采用卡尔曼滤波算法进行预处理,实现在动态环境下准确输出惯性数据。
根据足底压力信号的变化特点,利用阈值法对信号进行特征提取,设第i个压力传感器的阈值pth(i)等于其最大峰值的十分之一,此时稳定性较好。当足底压力信号为p(i)时,经阈值处理后的特征值pi*记为:

2 步态相位划分
针对下肢康复外骨骼机器人的应用,主要研究人体下肢的三个稳定状态:坐立状态,站立状态和行走状态。
人体行走是具有周期性的运动,通常将一侧足跟着地开始到该足跟再次着地记为一个步态周期。足底压力信息在步态运动周期中体现出很好的确定性和规律性,因此根据足底压力信号易于检测的三个标志性事件:足跟着地、足平放和足尖离地,将步态周期依次序划分为四个相位:
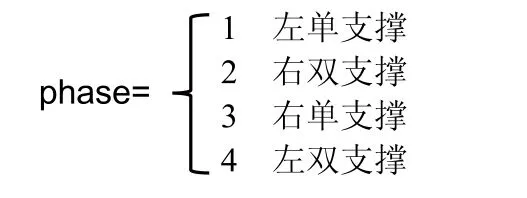
左足压力传感器从足尖到足跟依次记为LF1、LF2和LF3,右足压力传感器依次记为RF1、RF2和RF3,其对应的步态相位划分关系如表1所示

表1 行走步态相位划分
3 步态相位的切换
3.1 三个稳定状态的切换
坐立状态与站立状态的切换由按钮信号控制,当穿戴者按下站立按钮,控制器会根据当前传感信息进行状态判断,如果膝关节角度绝对值大于60°,髋关节角度大于50°,且足底压力较小,则判定为坐立状态,然后根据传感数据自动规划起立轨迹,延时2秒后电机使能进入起立阶段,穿戴者上肢借助拐杖的支撑来保持身体平衡,最终实现站立。站立切换到坐立由另一个按钮控制,当检测到坐立按钮信号后延时2秒,然后按预定的坐立轨迹执行动作,坐立完成后电机失能。
行走状态与站立状态切换如图2所示,穿戴者先依据个人习惯选择左腿起步或右腿起步。处于站立状态的穿戴者准备行走时会将身体前倾,陀螺仪检测到上身倾角大于设定阈值时便执行起步程序进入行走状态。行走过程中,当人体处于左单支撑或右单支撑相位时,穿戴者可以按下拐杖上的站立按钮,主控器检测到站立按钮的信号后,立即停止电机的运动并保持当前姿态,然后根据足底压力分布判断出支撑腿和摆动腿,通过姿态角信息的融合分析自动生成收步轨迹,执行收步动作,收步完成后调整到站立状态。当穿戴者处于行走过程中的双支撑相位时,需要进行支撑腿与摆动腿的切换,身体姿态难以完成收步动作,故主控器屏蔽拐杖的站立按钮信号,以保障穿戴者的安全。
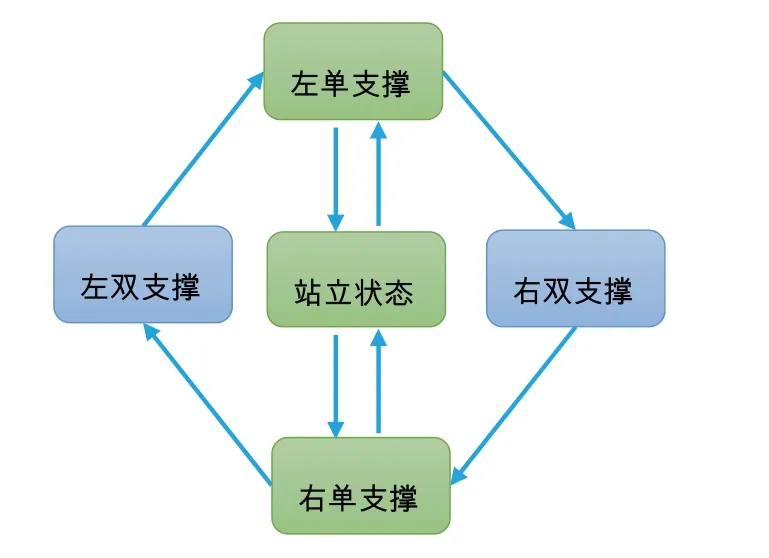
图2 行走-站立状态切换图
3.2 支撑腿与摆动腿的切换
在连续行走过程中最重要的动作是实现支撑腿与摆动腿的自动切换。由于支撑腿与摆动腿的切换是发生在双支撑相位的一个短暂的过程,没有准确的划分界限,并且每一个步态的切换时期并不完全相同,而是在一定范围内进行,这就使得通过设定单一阈值无法实现稳定柔顺的切换。为了解决这个问题,本文采用学习矢量量化神经网络模型来实现支撑腿与摆动腿的切换判定。
1)LVQ神经网络结构
学习矢量量化神经网络[8]是一种用于训练竞争层的有监督学习方法的输入前向神经网络,是从Kohonen的自组织特征映射网络[9]演化而来的,不需要对输入向量进行归一化、正交化处理,易于编程实现,且泛化性能好,因此在模式识别领域有着广泛的应用。LVQ神经网络由三层神经元组成,即输入层、竞争层和线性输出层,如图3所示,输入层n个神经元接受输入向量,与竞争层之间是全部连接。竞争层有m个神经元,其个数大于线性输出层神经元个数l,与输出层之间是部分连接,连接权值固定为1。

图3 LVQ神经网络结构
2)LVQ神经网络学习算法
LVQ的学习算法是在有教师状态下对竞争层进行训练的一种学习算法,其改进算法均是在LVQ1的基础上引入次获胜神经元。LVQ1算法的基本思想是:计算距离输入向量最近的竞争层神经元,找到与之相连接的线性输出层神经元,根据输入样本类别和获胜神经元所属类别,判断当前分类是否正确。若分类正确则获胜神经元的权向量向输入向量方向调整,分类错误则向反方向调整,每次只对获胜神经元的权值进行更新。本文采用改进的LVQ2.1算法同时考察两个权值向量,加快算法的收敛速度,使各个权向量快速的向目标位置移动[10],具体步骤如下:
步骤1:初始化输入层与竞争层之间的权值ωij,设置初始学习率和训练次数K。
步骤2:将类别为Cx的输入向量送入输入层,根据公式(2)计算竞争层神经元与输入向量的距离。

式中ωij为输入层的神经元j与竞争层的神经元i之间的权值。
步骤3:选择竞争层与输入向量X距离最近的神经元i为获胜神经元,次近的神经元j为次获胜神经元,距离分别记为di和dj,对应的类别记为Ci和Cj。

为输入向量可能落进的接近于两个向量中段平面的窗口宽度,一般取2/3。则有:
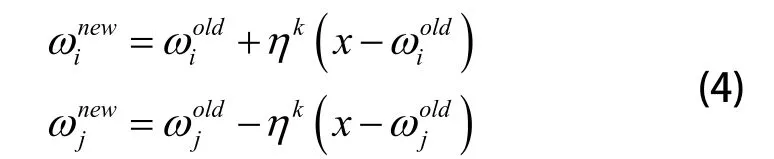
1)若Ci=Cx,则神经元i和神经元j的权值按公式(4)进行修正:
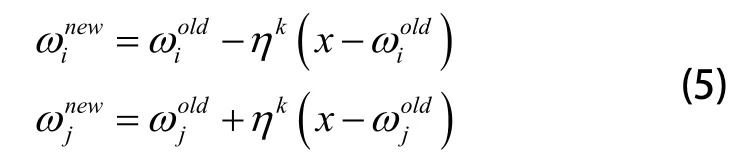
2)若Ci=Cx,则神经元i和神经元j的权值按公式(5)进行修正:
步骤5:若Ci=Cj,则只更新距离输入向量最近的神经元i的权值,更新规则如下:
1)若Ci=Cx,则用公式(6)调整权值:

2)若Ci≠Cx,则用公式(7)调整权值:

步骤6:迭代一次后更新学习率:

步骤7:若误差精度满足了要求或者迭代次数达到了K次,结束训练,否则转至步骤2继续训练。
4 实验结果与分析
4.1 数据获取
实验邀请五名24岁到28岁的健康男士穿戴外骨骼机器人进行数据采集和测试,实验者身高在172cm到180cm之间,体重在64kg到72kg之间。实验者借助拐杖以较慢速度模拟助力行走步态,选取每名实验者的20个稳定步态数据作为样本集进行分析。其中一名实验者的单个步态周期相位划分如图4所示。

图4 单周期步态数据相位划分
4.2 LVQ模型的构建与在线测试
依据穿戴者的运动意图,结合关节角度和足底压力的变化情况,将行走过程中双支撑相位的支撑腿和摆动腿预备切换前的样本数据标记为类1,开始切换后的样本数据标记为类2,选取标记好的样本数据中的足底压力和陀螺仪属性构成样本向量对LVQ网络进行训练。对每一个实验者选取480个样本数据,样本类别比例为1:1,随机各选150组样本数据组成含有300个样本数据的训练集,剩下180组作为测试集。实验基于Matlab R2014a平台,采用LVQ2.1变学习率的学习算法达到快速收敛。LVQ神经网络输入层神经元个数为7,输出层神经元个数为2。通过多次试验得到竞争层神经元个数为20,学习率初始值为0.1,迭代次数为100,目标误差设为0.02时的效果最好,此时单个网络的训练过程如图5所示,由图可知第27次迭代训练时满足了误差精度要求,训练停止。

图5 网络训练过程
模型的ROC曲线如图6所示。
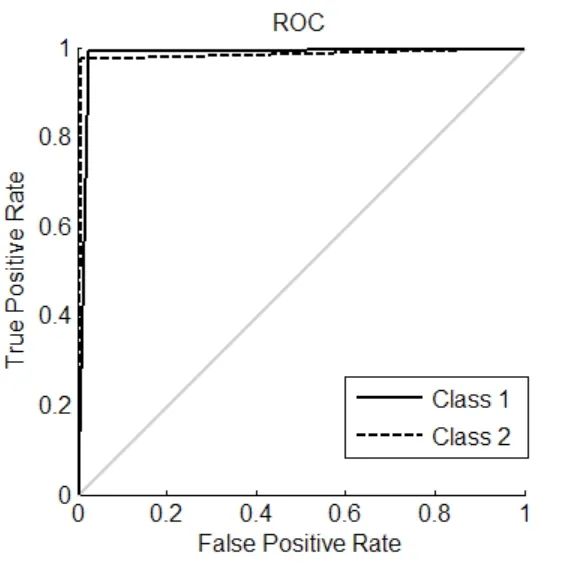
图6 LVQ神经网络的ROC
样本数据识别结果的混淆矩阵如图7所示,整体识别率达到了98.8%。

图7 混淆矩阵
对左右腿的支撑与摆动切换分别构建LVQ神经网络模型进行在线测试,将模型参数导出,用C语言实现并嵌入控制程序。当进入双支撑相位时将实时采集的样本向量输入LVQ神经网络进行分类。为了增加稳定性,通过距离最近的2个神经元的类别进行判断,当这两个神经元的输出类别相同且为新类别2时,输出识别结果并执行切换动作,然后退出识别模型,否则继续对新的样本向量进行识别判断,流程图如图8所示。
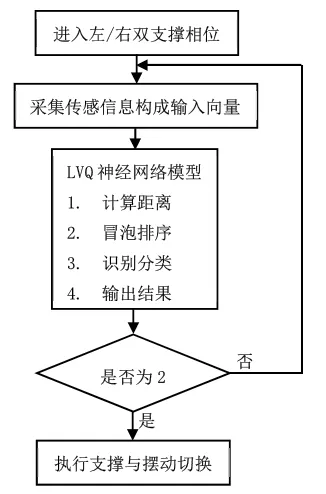
图8 支撑与摆动切换判断流程图
模型的在线测试实验如图9所示,测试结果表明针对某一实验者构建的识别模型对该实验者的步态相位切换具有很好的识别效果,对身体条件相近的实验者具有较好的识别效果,模型有良好的泛化性能。由于个体身体健康状况条件差异较大,因此实际使用时需要根据穿戴者的身体状况构建模型,调整参数,以便达到最佳效果。
5 结束语
本文根据下肢康复外骨骼机器人的具体应用,研究了人体下肢运动的三个稳定状态的切换。针对行走状态是一系列有次序的运动,依据三个足底压力标志性事件将步态周期划分为四个相位,降低了模型复杂度。在此基础上根据采集的传感器信息对每个相位的运动状态切换进行了具体研究。此外,通过在人体双支撑相位构建LVQ神经网络模型实现了支撑腿与摆动腿的自动切换。在线测试结果表明该模型实时性好,识别率高,能够实现下肢步态相位的安全稳定切换。

图9 模型在线测试
[1] 李坦东,王收军,侍才洪,等.穿戴式外骨骼机器人的研究现状及趋势[J].医疗卫生装备,2016,37(9):116-119.
[2] Sprager S,Juric M B. Inertial Sensor-Based Gait Recognition: A Review[J].Sensors,2015,15(9):22089-22127.
[3] 汪飞跃,姚志明,许胜强,等.基于柔性力敏传感器的左右脚动态识别方法[J].传感技术学报,2015(7):964-971.
[4] Liu D X, Wu X, Du W, et al. Gait Phase Recognition for Lower-Limb Exoskeleton with Only Joint Angular Sensors:[J].Sensors,2016,16(10):1579.
[5] Pappas I P I, Keller T,Mangold S.A reliable, gyroscope based gait phase detection sensor embedded in a shoe insole[J].IEEE Sensors Journal,2004,4(2):268-274.
[6] Wu G, Wang C,Wu X, et al. Gait phase prediction for lower limb exoskeleton robots[C].IEEE International Conference on Information and Automation. IEEE,2017.
[7] Djuric M. Automatic recognition of gait phases from accelerations of leg segments[C].IEEE,2008:121-124.
[8] 王小川,史峰,郁磊,等.MATLAB神经网络43个案例分析[M].北京航空航天大学出版社,2013.
[9] Kohonen T.Self-organizing maps[M].Self-Organizing Maps.Springer Berlin Heidelberg,1997:266-270.
[10] 张敏灵,陈兆乾,周志华.SOM算法、LVQ算法及其变体述[J].计算机科学,2002,29(7):97-100.
Research on gait phase transition for lower limbs rehabilitation exoskeleton robot
MA Le1,2, ZHOU Ping2, WANG Mei-ling2, CHEN Shu-yan2, ZHANG Peng-wan3
TP242.6
:A
:1009-0134(2017)08-0047-04
2017-06-14
常州市科技支撑计划项目(CE20150013)
马乐(1989 -),男,河南洛阳人,硕士研究生,研究方向为传感技术,模式识别。
