智能校园巡逻安保机器人设计
2017-09-15薛金言
薛金言,张 斌,武 瀚
(哈尔滨理工大学 机械动力工程学院,黑龙江 哈尔滨 150000)
智能校园巡逻安保机器人设计
薛金言,张 斌,武 瀚
(哈尔滨理工大学 机械动力工程学院,黑龙江 哈尔滨 150000)
新型功能的智能机器人是当下研究的热点之一,而智能车是轮式机器人的一种,在实际生活和科技军事领域都发挥着不可替代的作用,因其可以适应复杂多变的环境,执行一些人类无法执行的任务。结合常被社会关注的校园安全问题,文章设计了校园安保机器人小车,主要概括了国内外机器人领域的现状、所存在的主要问题以及发展方向;另外,对智能安保机器人的基本结构及功能进行了阐述。
智能车;安保;机器人
随着社会经济的发展,超级商场、机场、车站、会展中心及物流仓库等大型人流、物流场所的规模和数量不断扩大,大中城市的高层、高档商用日益增多,其保安自动化需求日趋迫切。巡逻机器人是一个集环境感知、路线规划、动态决策、行为控制以及报警装置于一体的多功能综合系统,采用巡逻机器人实行定时、定点监控巡逻或不间断流动巡逻将是目前一种可行的解决方案[1]。而机器人在环境中能够准确地定位以及躲避可能存在的障碍物,是机器人完成巡逻任务的前提和基础。将机器人用于保安工作,具有广阔的应用前景,近年来已受到国内外的重视,成为服务机器人的一个新研究方向。
目前,在校园中比较通用的办法是,校园物业招聘保安,成立夜间巡逻队。实践证明,这种方法虽然能起到一定的作用,但缺陷也是非常明显的。首先,安保行业缺口大。据资料显示,安保从业人员不足需求量的80%,需求缺口不少于112万人,并且安保行业的流动性非常高。其次,从业人员的素质偏低。由人构成的夜间巡逻队伍不能保证不遗留死角,且人在深夜容易瞌睡,保安人员会发生脱岗漏岗睡岗现象。再次,保安“老龄化”趋势严重。校园保安即使发现有可疑人员也无法迅速通知监控中心,安保行业市场面临的困惑亟待解决。而随着人工智能安保机器人的出现,安保机器人作为智能安防中的重要一员,可代替更多的劳动力,成为产业升级或变革的重要工具,传统商业的安防模式将逐渐进入机器智能化时代[2]。鉴于此,我们设计制作了智能巡逻校园安保机器人。
1 智能校园巡逻安保机器人整体结构的设计
1.1 智能校园巡逻安保机器人整体结构
智能校园巡逻安保机器人的基本结构是把一系列传感器以及检测装置与图像传输装置安装在基于麦克纳母轮的移动平台上,可以实现自由灵活的移动。综合上述的装置和平台,实现了巡逻机器人的全方位的智能巡逻与安保。
整机是由基于麦克纳木轮的底盘系统、底盘控制系统、视觉避障系统、图像采集及传输系统、检测与报警系统组成。安保机器人的巡逻功能分自动巡逻和远程遥控巡逻两种模式[3]。在自动模式下,机器人可根据环境信息,自动构建地图及实时定位,并按预定路线、预定时间执行巡逻任务。在巡逻过程中机器人若自身电力不足,可自行寻找充电桩对接充电。远程模式则是通过远程遥控器操作机器人巡逻。其中麦克纳母轮底盘系统和底盘控制系统用来保证机器人的灵活移动与避障,可以根据场地的具体情况,设定规划好一条路径,也可以通过视觉避障系统发出的指令进行移动。视觉避障系统用来保证机器人的避障与行进。当视觉避障系统发现接近障碍时,发出信号给底盘控制系统,使其做出判断,并做出正确的路径规划,继续前进。图像采集及传输系统用来进行实时的图像采集与回传,其具有夜视功能的高清数字摄像头及各种传感器,可实时视频监控、录像存储、历史回放。同时该机器人还可以通过前后左右4个移动高清数字摄像头,综合各个传感器信息,将检测到的图像回传给控制系统与控制室,控制系统做出判断后,若发现异常情况,会立即发送到检测与报警系统,检测与报警系统用来实时检测周边环境的与发出报警,当其发现可疑的气体或图像后,立即拉响警报并且给主控室发出报警,提醒主人当前环境发生异常情况。
1.2 视觉避障系统的设计
视觉避障部分采用超声波与光电管结合,超声波测距部分使用TR40超声波探头,而红外检测则采用了L5IR3-30红外发射二极管和IRM38BL-2一体化接收头,其具有衰减低、可靠性高等特点[4]。在利用超声波测距的同时,利用红外线检测弥补超声波检测的角度精度,因为超声波发射头的发射角度较大,而红外线发射头的发射角度相对较小,将两者结合可以更准确地检测出前方物体的具体位置和距离,甚至可以扫描出前面物体的大体轮廓。在机器人进入自动值守模式时,两侧的热释红外传感器开始工作,当有人在传感器警戒范围内走动时,由人体发出的微量红外线通过菲涅尔透镜聚焦后,在热释电人体红外线传感器的内部敏感元件上引起温度变化而产生极化,从而在传感器的外接电阻两端输出传感信号。此传感信号相当微弱,经二级放大、双向鉴幅、延时处理后,再送往单片机处理,从而实现摄像头自动检测拍摄移动人体的功能[5]。
1.3 可移动底盘设计
可移动底盘设计能够使车具有前行、横移、斜行、旋转及其组合等运动的能力。使用铝型材去制作底盘,因为铝型材结构特殊方便后期的调整,而且铝型材的质量比较轻,结构强度高,并且铝型材符合国家标准,使用更加方便。又因为是小型机器人,所以对机器人的质量有限定,使用铝型材作为机器人的底盘,刚好解决了机器人底盘笨重,对电机负载较大的难点,同时铝型材有专门的连接件,有很少的打孔和很少的折弯,加工简单,装配方便,减少了对铝型材的二次加工,所以极大地方便了机器人的组装,同时也大大减轻了后期调整的负担,能够使车具有前行、横移、斜行、旋转及其组合等运动的能力。
智能校园巡逻安保机器人作为一种新的一种全向移动的新型机器人,其基本结构是通过把一系列的传感器与检测装置安装在底盘上面,使其完成相应的功能。机器人的底盘是保证机器人移动的核心,所以在设计的时候,应该考虑到其灵活性,一般的底盘都比较笨重,灵活性比较差,或者运动特性不好,不能满足在校园环境中使用的条件,而且不能在一些狭小的环境中移动,会对机器人的功能起到一定的限制。所以在下文中我们对机器人的底盘进行详细的设计分析。
2 底盘可行性方案的设计与比较
2.1 方案一
如图1所示,三角全向轮系的路径调试较好,耐碰撞性能一般,有着较好的强度,且机构布置方便,但在制作方面有一定难度且移动性能较差,调试过程中不易实现。
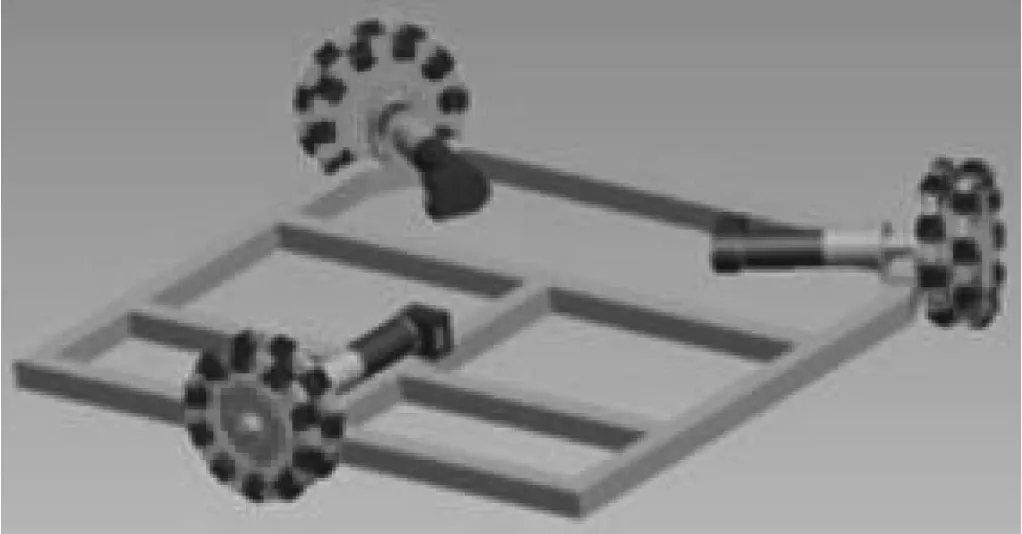
图1 三轮全向轮系
2.2 方案二
如图2所示,差速轮系的路径调试一般,有着较好的耐碰撞性和强度,制作工艺简单,但在机构布置方面有一定难度。
2.3 方案三
如图3所示,麦克纳姆轮系的路径调试效果较好,有着较好的耐碰撞性和强度,制作比较困难,但在机构布置方面非常简单。机器人的底盘使用麦克纳姆轮,因为使用麦克纳姆轮是基于一个有许多位于机轮周边轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力向量,从而保证了这个平台在最终的合力向量的方向上能自由地移动,而不改变机轮自身的方向。在其轮缘上斜向分布着许多小滚子,故轮子可以横向滑移[6]。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便地实现全方位移动功能[7]。
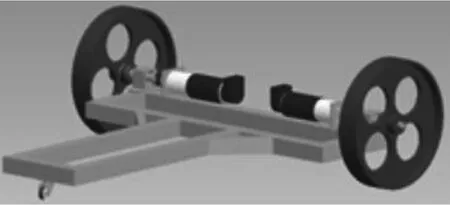
图2 差速轮系
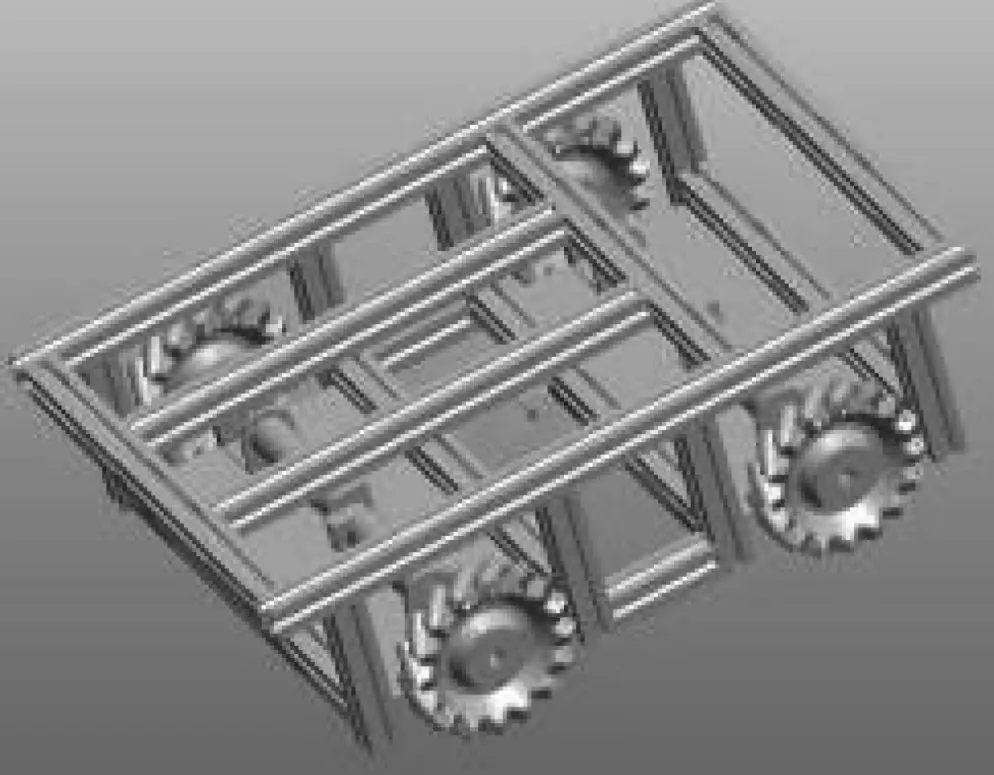
图3 基于麦克纳姆轮的四轮全向轮系
3 结语
通过对3种底盘的对比分析,采用麦克纳姆轮有着较大的优势。机器人安装了基于麦克纳姆轮的底盘,所以克服了大多数工业机器人不可以移动的问题,该机器人可以自由行走,运动灵活,操作方便,同时将多种传感器安装在可以动的底盘上,大大提高了机器人的灵活性。此外该小型可移动智能安保巡逻机器人非常适合应用在空间有限、狭窄的环境,在提高工作效率、降低人力成本方面具有明显的效果。
该小型可移动多用途机器人的体积小,且具有一定的智慧。因此其训练和调试工作将变得更加简单,同时操作控制将变得更加简洁容易上手,因此其性价比将进一步提升[8]。所以该机器人的使用范围将更加广泛,其不仅可以在校园环境中发挥自如,而且适用于商场、大型楼宇中,从而有力地解决了安保人员雇佣难、劳动力短缺的问题。
[1]王田苗,刘进长.机器人技术主题发展战略的若干思考[J].中国制造业信息化,2003(1):31-35.
[2]王握文.世界机器人发展历程[J].国防科技,2001(1):70-75.
[3]章小兵,宋爱国.地面移动机器人研究现状及发展趋势[J].机器人技术与应用,2005(2):19-23.
[4]徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与用,2001(3):7-14.
[5]张明路,丁承君,段萍.移动机器人的研究现状与趋势[J].河北工业大学学报,2004 (2):110-115.
[6]蒋新松.机器人与工业自动化[M].石家庄:河北教育出版社,2003.
[7]王灏,毛宗源.机器人的智慧控制方法[M].北京:国防工业出版社,2002.
[8]江浩,樊炳辉.新型移动机器人的结构设计[J].应用科技,2000(8):3-5.
Design of intelligent campus patrol security robot
Xue Jinyan, Zhang Bin, Wu Han
(Mechanical Engineering School of Harbin University of Science and Technology, Harbin 150000, China)
The intelligent robot of the new function is one of the hotspots of the present research, and the intelligent vehicle is a kind of wheeled robot, which plays an irreplaceable role in the real life and the military fi eld of science and technology because it can adapt to the complicated environment, perform some tasks that humans can not. Combined with the campus security issues that are often of concern to society, we hereby designed a campus security robot car. This paper mainly elaborates the current situation, the main problems and the development direction of the robot at home and abroad. In addition, the basic structure and function of intelligent security robot are expounded.
intelligent car; security; robot
薛金言(1995— ),男,甘肃武威人,本科;研究方向:机械设计。