滚珠丝杠压扭型2D电液比例方向阀动态特性研究
2017-09-14陆倩倩
左 强 陆倩倩, 李 胜 邢 彤 阮 健
1.浙江大学城市学院工程学院,杭州,3100152.浙江工业大学特种装备制造与先进加工技术教育部重点实验室,杭州,310014
滚珠丝杠压扭型2D电液比例方向阀动态特性研究
左 强1陆倩倩1,2李 胜2邢 彤2阮 健2
1.浙江大学城市学院工程学院,杭州,3100152.浙江工业大学特种装备制造与先进加工技术教育部重点实验室,杭州,310014
提出了一种滚珠丝杠型压扭联轴器,该联轴器能将输出力放大约20倍,有效地解决了因比例电磁铁磁饱和造成直动比例方向阀无法实现大流量的问题。该联轴器将2D方向阀和比例电磁铁相连接,利用压扭放大驱动技术,将电磁力转化为阀芯左右两端不平衡的液压力,以克服摩擦力、卡紧力和液动力等非线性因素的影响。对主阀P-A处与导控级的压力分布和流场分布进行了仿真分析,理论与实验研究表明:压扭联轴器有效地放大了电磁力,在流量约为210 L/min的情况下,阀的阶跃响应约为0.35 s,该阀-90°频率为4 Hz左右。叠加一定颤振对改善阀的阶跃响应不明显,但能较好保证阀芯位移与电磁铁位移之间的跟随性。
2D阀;压扭联轴器;比例阀;比例电磁铁
0 引言
电液比例方向阀以其结构简单、对介质清洁度无特殊要求、制造成本低、可简化液压系统以及能耗低等特点,已成为电液比例控制系统中应用最广泛的基础元件之一[1]。按照对功率级控制方式来分,比例方向阀又可以分为直接控制式(单级阀)和先导控制式[2]。直接控制式比例方向阀是由电-机械转换器直接驱动功率级阀芯运动[3]。然而,由于伯努利效应,油液流经阀口会对阀芯作用一个液动力(也称伯努利力),该力的大小与阀口的开口面积和压降乘积成正比,因而直动比例阀随着阀口压差的增大比例特性明显变差,甚至出现随着阀口压差增大通过比例阀的流量反而减小的不正常现象[4],且比例电磁铁输出力有限,采用直动电液比例阀无法从根本上解决高压、大流量下液动力影响的问题。对高压大流量液流实现比例控制,必须采用先导式二级或多级比例方向阀[5]。
滚珠丝杠副大多应用于旋转变直线运动的传递[6],由于使阀芯旋转不受轴向稳态液动力影响[7],且切向瞬态液动力极小[8],故本文考虑将压扭放大驱动技术应用于液压阀设计。2D电液比例方向阀将导控级和主阀融为一体,通过压扭放大驱动技术实现位置反馈,相对其他电液比例方向阀,该阀在保证高压大流量的同时仍具有如下优点:体积小,结构简单且加工方便,无需任何固定阻力小孔来保证其稳定性,抗污染能力强,导控级零位泄漏小和具有零压(失压)保护功能。
1 滚珠丝杠压扭型2D电液比例方向阀工作原理
滚珠丝杠压扭型2D电液比例方向阀的结构如图1所示。它由2D方向阀、滚珠丝杠型压扭联轴器和比例电磁铁三者共轴连接组成。2D方向阀采用阀芯旋转和滑动的双自由度运动实现导控型电液比例方向阀功能。阀芯转动使液压阻力桥路输出压力发生变化,进而产生静压力驱动阀芯轴向运动。与2D伺服阀不同的是[9],2D方向阀感受通道为直槽,而不是螺旋槽,故2D方向阀本身不具有位置反馈功能[10],但结构更为简单。为保持阀芯的径向力平衡并提高抗污染能力,阀芯孔采用具有双余度的液压阻力半桥控制。
2D电液比例方向阀的工作原理如图2所示。2D方向阀右腔通过小孔a,经阀芯杆内通道和小孔b与进油口P(系统压力)相通,其截面积为左腔截面积的一半;在阀芯左端台肩上开设了一对低压孔c和高压孔d,两个孔分别与开设于阀芯孔内表面的感受通道f相交,相交的两个微小弓形面积构成了串联的液压阻力半桥,它控制左敏感腔e的压力。在静态时,复位弹簧Ⅰ和复位弹簧Ⅱ处于预紧状态,有效消除了钢球与滚道之间的间隙,此时,若不考虑摩擦力及阀口液动力的影响,低压孔c和高压孔d与感受通道f相交的弓形面积相等,左敏感腔e的压力为P口压力的一半,阀芯轴向保持静压平衡。在系统具有正常的工作压力时,2D电液比例方向阀运动分解如图3所示。阀芯受液动力影响无法直接由电磁力推动,当比例电磁铁线圈电流加大产生向左推力时,钢球在直槽n和直槽v之间滚动,使压扭联轴器B段受径向约束,同时只能向左移动Δδ位移,此时,通过螺旋滚道h和螺旋滚道g之间的钢球作用,压扭联轴器B段在驱动压扭联轴器C段逆时针(面对阀芯伸出杆)转动Δθ。由于阀芯与压扭联轴器C段固连,则低压孔c弓形面积增大、高压孔d弓形面积减小,左腔e压力减小,使阀芯两端压力不平衡,并且在压扭联轴器A段螺旋滚道t和C段螺旋滚道s之间的钢球作用下,压扭联轴器C段将螺旋向左前进,直至C段顺时针(面对阀芯伸出杆)转回Δθ,由于螺旋滚道s、t、g和h的螺旋升角相同,则A段和C段向左位移必将也是Δδ,与比例电磁铁输入位移相同,此时,低压孔c、高压孔d与感受通道f相交的弓形面积相等,阀芯重新平衡。同理,当电流减小,弹簧恢复产生向右拉力时,阀芯将向右移动, 2D电液比例换向阀的控制流程图见图4。
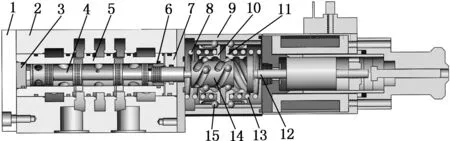
1.阀后盖板 2.阀体 3.堵头Ⅰ 4.阀芯 5.阀套 6.同心环 7.塞环 8.复位弹簧Ⅰ 9.套筒 10.压扭联轴器A段 11.压扭联轴器B段 12.比例电磁铁衔铁 13.复位弹簧Ⅱ 14.压扭联轴器C段 15.钢球 图1 滚珠丝杠压扭型2D电液比例方向阀结构图Fig.1 Structure of ball-screw type 2D electro-hydraulic proportional directional valve

1.压扭联轴器A段 2.套筒 3.复位弹簧Ⅰ 4.压扭联轴器B段5.比例电磁铁 6.钢球 7.压扭联轴器C段 8.复位弹簧Ⅱ图2 2D电液比例方向阀工作原理Fig.2 Schematic of 2D electro-hydraulic proportional directional valve
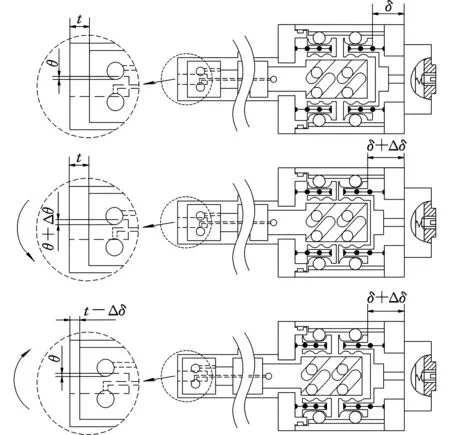
图3 2D电液比例方向阀运动分解图Fig.3 Motion diagram of 2D electro-hydraulic proportional directional valve
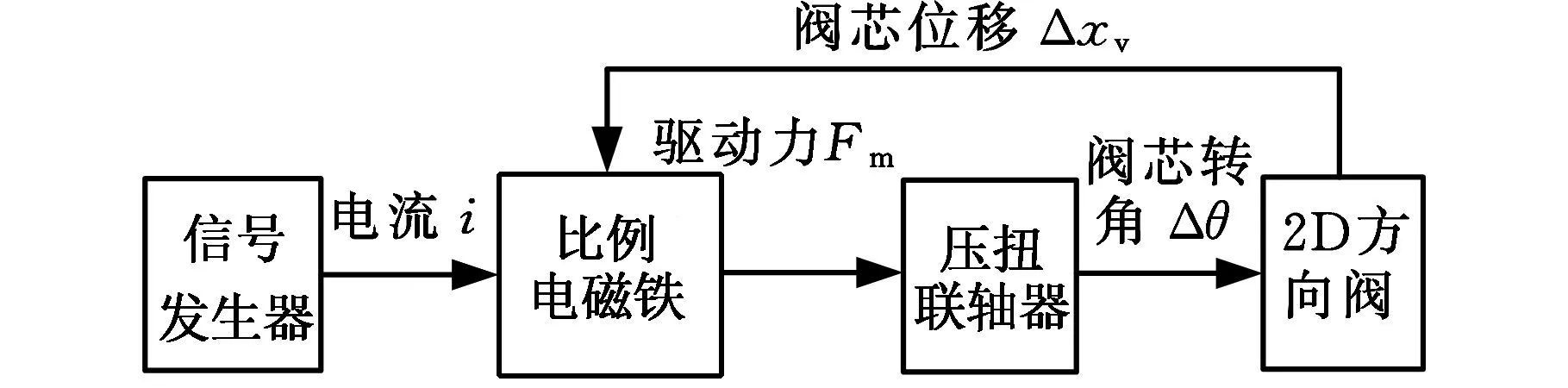
图4 2D电液比例换向阀的控制流程图Fig.4 Control signal flow chart of 2D electro-hydraulic proportional directional valve
2 滚珠丝杠型压扭联轴器建模分析
图5是以OO′为轴线的机构展开受力图。滚珠丝杠副通过滚珠进行载荷传递,且一般只承受轴向载荷,但由于螺旋滚道存在一定的加工误差等,在各个滚珠上分配的载荷并不是均匀的,现为了计算方便,假设其为理想情况,各个滚珠上分配的轴向载荷均匀,且法向力的合力通过丝杠轴线。
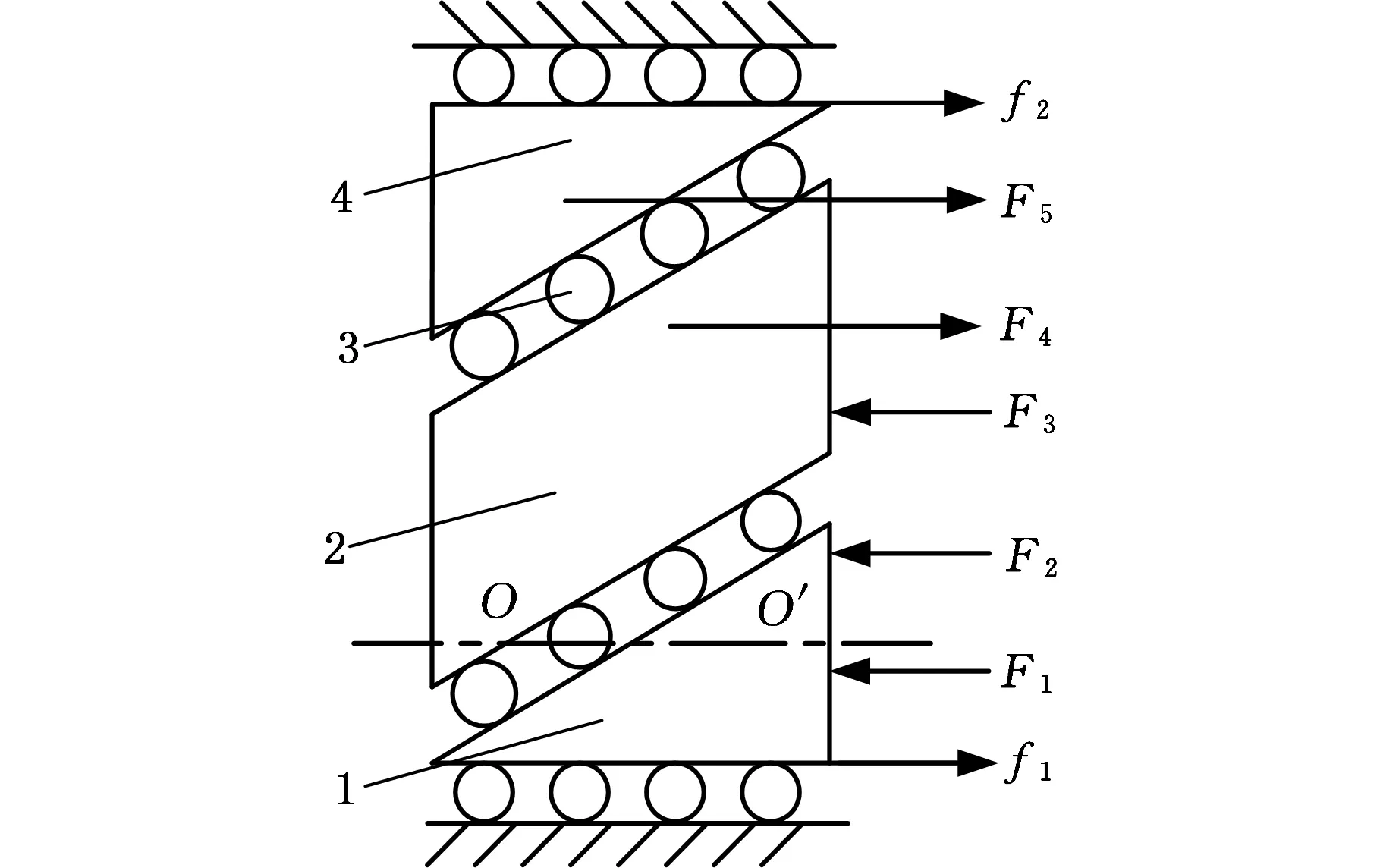
1.压扭联轴器B段 2.压扭联轴器C段 3.滚珠 4.压扭联轴器A段图5 展开机构受力图Fig.5 Mechanism deployment
由于压扭联轴器A段和B段轴向作用力对压扭联轴器C段的扭转为反效果,将A段、B段和C段合为整体进行分析,则

(1)
(2)
式中,Fm为压扭联轴器C段产生扭矩效果的轴向合力;F1为比例电磁铁推力;F2为压扭联轴器B段预紧力;F3为压扭联轴器B段对C段轴向合力;F4为压扭联轴器A段对C段轴向合力;F5为压扭联轴器A段预紧力;f1为压扭联轴器B与套筒间摩擦力;f2为压扭联轴器A与套筒间摩擦力;pc为敏感腔压力;ps为系统压力;xv为阀芯位移;mt为折算到阀芯上的总质量;Be为折算到阀芯上的总黏性系数;KL为弹性负载刚度;FL为任意负载力;M为压扭联轴器C段输出的扭矩;R为联轴器传递力的有效半径;β为螺旋升角;xm为轴向输入行程;θ为阀芯转角。
可以看出:当β>45°时,压扭联轴器具有增力的效果。由此可知螺旋升角是影响压扭联轴器力放大效果的主要参数。当机构的轴向输入行程xm一定时,螺旋升角β设计得越大,输出扭矩M就越大,输出转角θ越小。当螺旋升角β等于滚动摩擦角时,机构的效率η为0,随着β的增大,其传动效率可升至0.98。
为进一步说明压扭放大消除阀芯摩擦力的效果,定义力放大系数kf为阀芯圆柱表面驱动力Fθ与比例电磁铁推力F1之间的比值,导阀的开口y为阀芯转角θ所对应的孤长,则有
(3)
kf=Fθ/Fm=xm/y=Rtanβ/r
(4)
从液压系统考虑,分别将主阀芯理解为液压缸,导控级理解为三通阀控缸,从导控级压力增益经验得知,导阀的最大开口转角幅度初步为2.4°,对应弧度设计为0.1 mm,此时比例电磁铁的最大行程为2 mm。由此,在阀芯运动因为受卡紧力或摩擦力等非线性阻力不能工作时,力放大系数kf的值约为20,能极大地克服卡紧力或摩擦力等非线性因素对比例特性的影响。
3 主阀P-A处与导控级的压力分布和流场分布仿真
当阀口保持不变,液体流经阀口时,由于动量改变而作用在阀芯上的力称为稳态液动力,其方向为使阀口趋于关闭方向,稳态液动力
FS=ρ1qvcosφ=(2CdCvWcosφ)xΔp=KsxΔp
(5)
式中,Cd为液体流量系数;Cv为液体流速系数;W为滑阀阀口通流面积梯度;ρ1为油液密度;φ为液流的射流角;x为滑阀阀口开度;Δp为液流流经阀口前后的压力差;Ks为液动力系数。
由式(5)可知,在阀芯换向时,系统压力越大,稳态液动力越大,则换向推动阀芯所需力也越大,特别是在高压大流量的液压系统中,一般传统的直动式滑阀会出现液动力大于操纵力,使阀芯动作失效的情况。补偿稳态液动力的方法很多[11],比如,阀套运动法、特形阀腔法、改造流道法、阀套径向开孔法、非全周开口法及二级或多级控制方法,现工程中大多采用二级或多级控制方法,利用先导溢流阀或减压阀进行先导控制,但是导控级阀相比直动式阀,不仅增加了制造成本,且体积和重量都增大明显。
瞬态液动力是滑阀在移动过程中,开口大小发生变化时阀腔中液流因加速或减速而作用在阀芯上的力,其大小为

(6)
式中,l为阀腔长度;K1为阻尼系数。
在Gambit中对三维模型划分好网格后,就可以导入到FLUENT软件中进行仿真了,在进行迭代之前必须对仿真条件进行设置,包括流动状况、流体物理特性、出入口压力条件、有无热交换和壁面流动状况等。对于本文的模型作了如下的初始化:①流体介质为液压油,密度为860 kg/m3,运动黏度为4×10-5m2/s;②液压油不可压缩,为牛顿流体;③由于流体重力势能对液压阀影响不大,所以忽略重力;④假设系统中无热传导现象;⑤流场中为单相流;⑥阀中流场变化剧烈,为湍流,采用k-ε湍流模型进行计算;⑦进口和出口均为压力条件,进口相对压力为28 MPa,出口相对压力为0。
阀口P-A处在开口为1.2 mm时的阀内压力仿真分布如图6所示。图6表明感受通道与高低压孔交接的面积处,压力呈现较为明显的渐变效应,所以高压孔与感受通道之间的压力差,或者感受通道与低压孔之间的压力差都是渐变的,使切向瞬态液动力大小也将减小,并且切向瞬态液动力的方向为切向方向,不容易造成液压冲击。速度流场仿真分布如图7所示,由于阀芯左端导控级容腔体积小,其压力增益极大,感受通道与高低压孔交接的面积只要有极小的差值,将迅速反映到阀芯的位移上,导控级只要在零角度左右工作即可实现主阀芯位置反馈控制,因此,在阀口P-A处开口时,导控级流速也明显快于主阀芯P-A处流速,表明了导控级控制实时性强,与理论分析相符合。
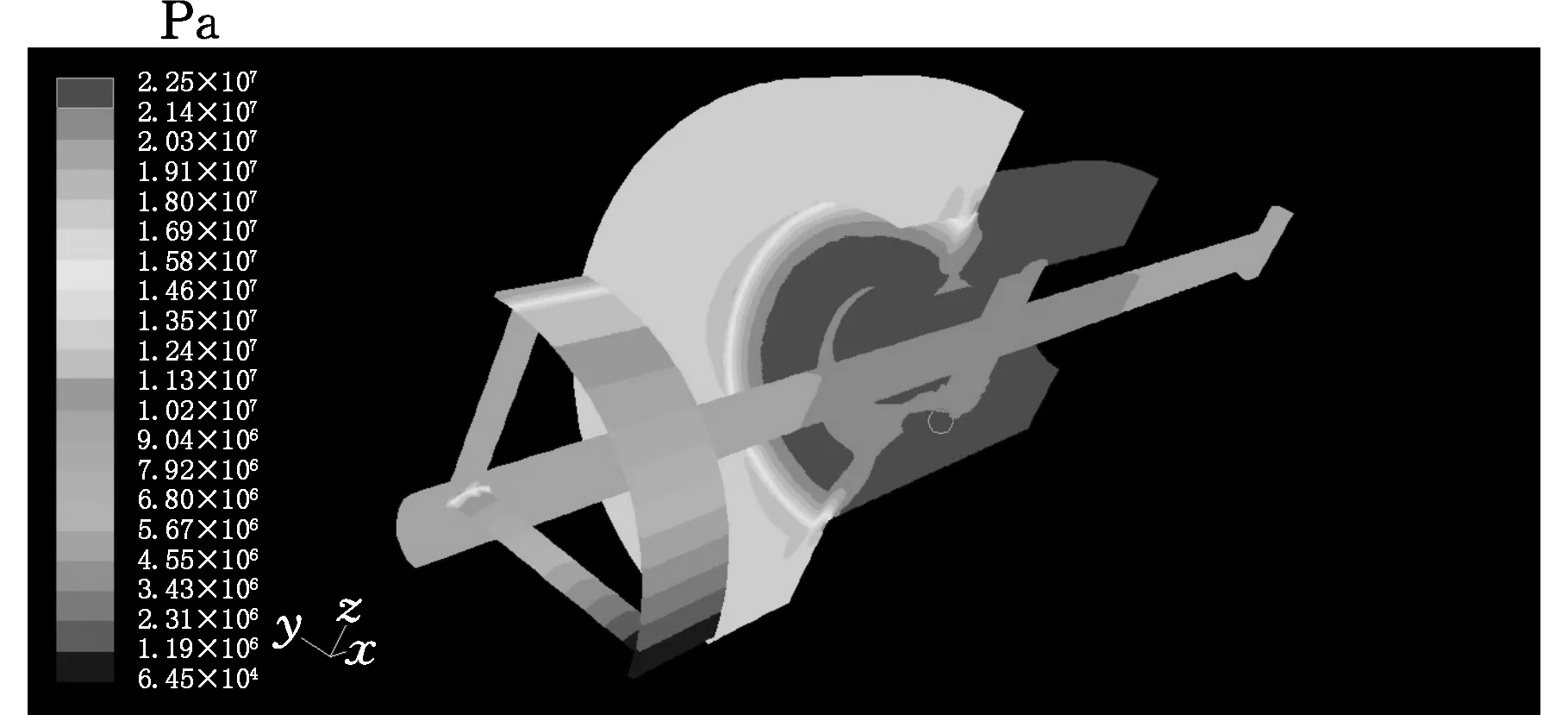
图6 当主阀开口为1.2 mm时阀内压力分布图Fig.6 Pressure distribution at 1.2 mm opening of the main valve
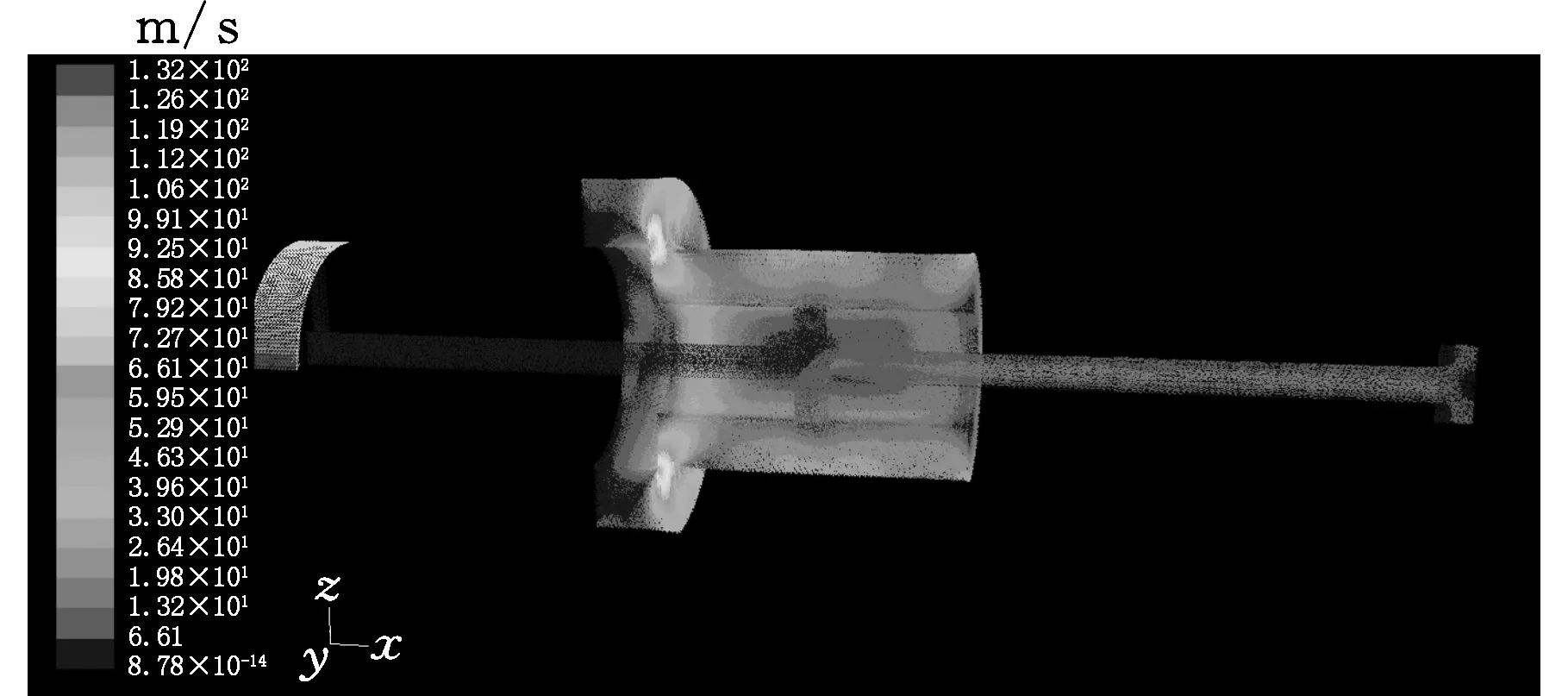
图7 当主阀开口为1.2 mm时阀内速度流场分布图Fig.7 Velocity flow field distribution at 1.2 mm opening of the main valve
4 滚珠丝杠压扭型2D电液比例方向阀阶跃特性实验研究
10通径的滚珠丝杠型2D电液比例方向阀实验回路如图8所示,测试所使用的流量计型号为VS 4,量程为300 L/min,精度为0.3%,重复精度为±0.05%。激光位移传感器采用德国进口的CASKEY激光测距仪,其模拟输出范围为0~10 V,最高分辨力可达7 μm,保证了测量的精确度。比例电磁铁型号为GP45-4-A型,额定行程为3 mm。实验时,信号发生器发送所需要的控制信号给比例电磁铁控制器。由于压扭联轴器传递过程中存在一定的摩擦力,且为了防止阀芯卡紧,故通过叠加特定的颤振信号的方式在一定程度上削弱摩擦力和卡紧力的影响。用示波器记录实验结果。2D电液比例换向阀测试平台如图9所示,图10为滚珠丝杠型压扭联轴器关键零件。系统调零后,关闭1号、2号和3号截止阀,打开4号和5号截止阀,输入电流为1 A的阶跃信号时,使阀处于满开口工作状态,调节系统压力为28 MPa,待示波器出现稳定的周期信号时,记录数据,分别叠加不同频率的颤振信号,得实验结果如图11所示,叠加不同频率的颤振信号对阶跃响应速度影响不大,响应的上升时间约为0.38 s。图11说明了该阀叠加不同频率的颤振输入信号,其动态阶跃响应并不明显。
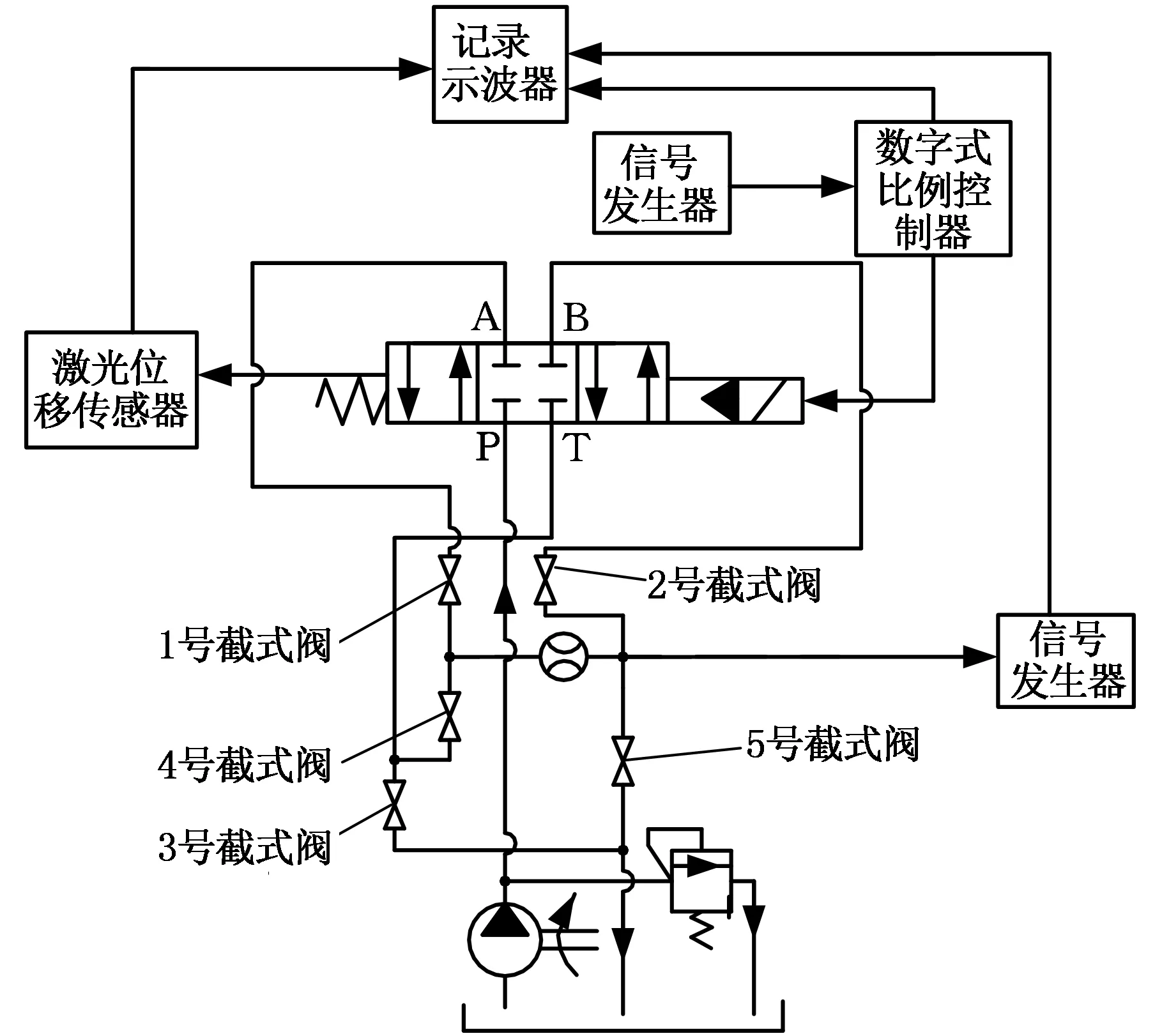
图8 2D电液比例换向阀的实验回路Fig.8 Test circuit of 2D electro-hydraulic proportional valve

图9 2D电液比例方向阀测试平台Fig.9 Test platform of 2D electro-hydraulic proportional directional valve

1.直槽 2.螺旋槽 3.压扭联轴器A段 4.压扭联轴器B段 5.压扭联轴器C段图10 滚珠丝杠型压扭联轴器关键零件Fig.10 Key parts of ball screw type pressure torsion coupling
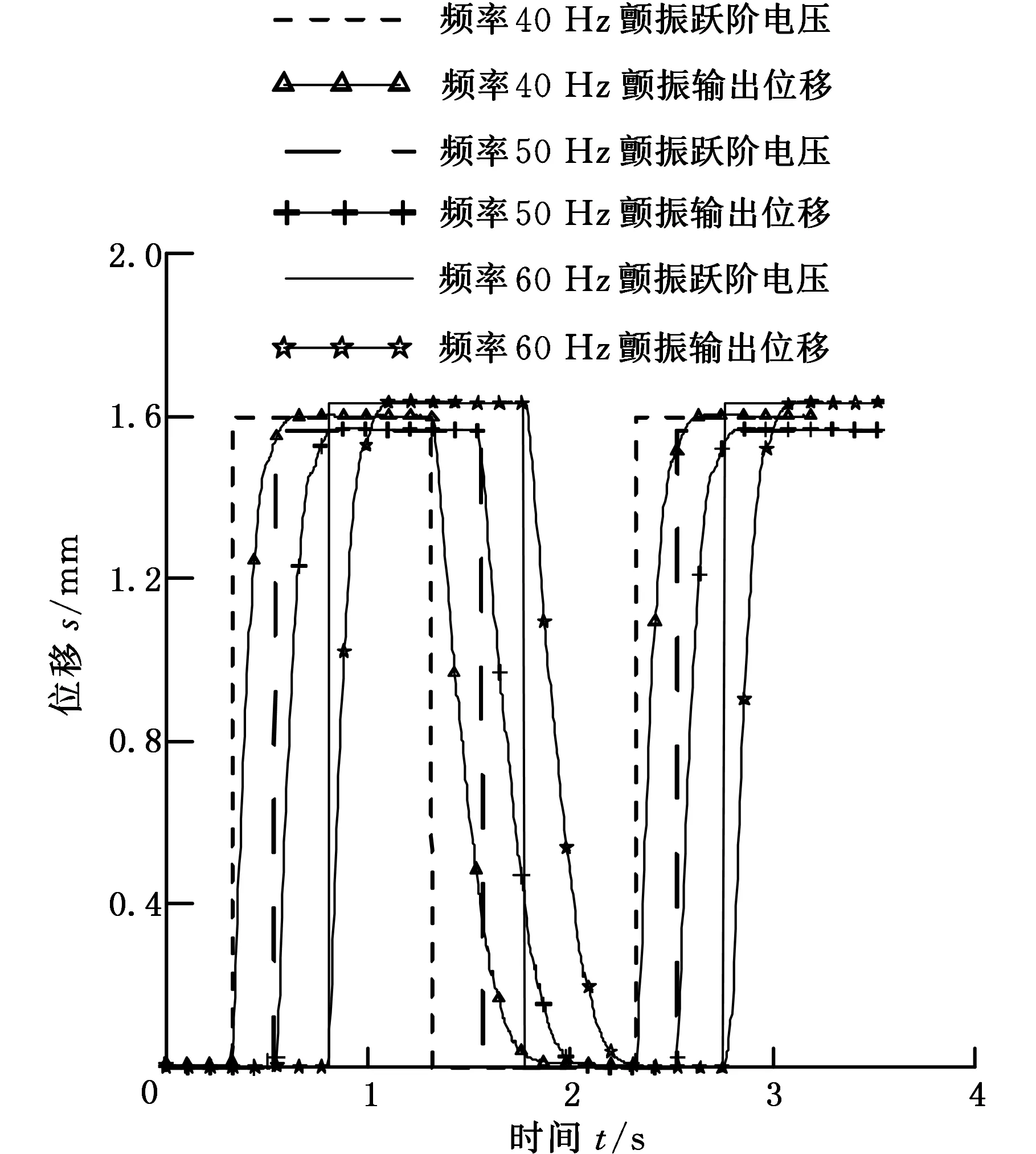
图11 2D电液比例换向阀阶跃特性Fig.11 2D electro-hydraulic proportional valve step characteristic diagram
5 滚珠丝杠压扭型2D电液比例方向阀频率特性实验研究
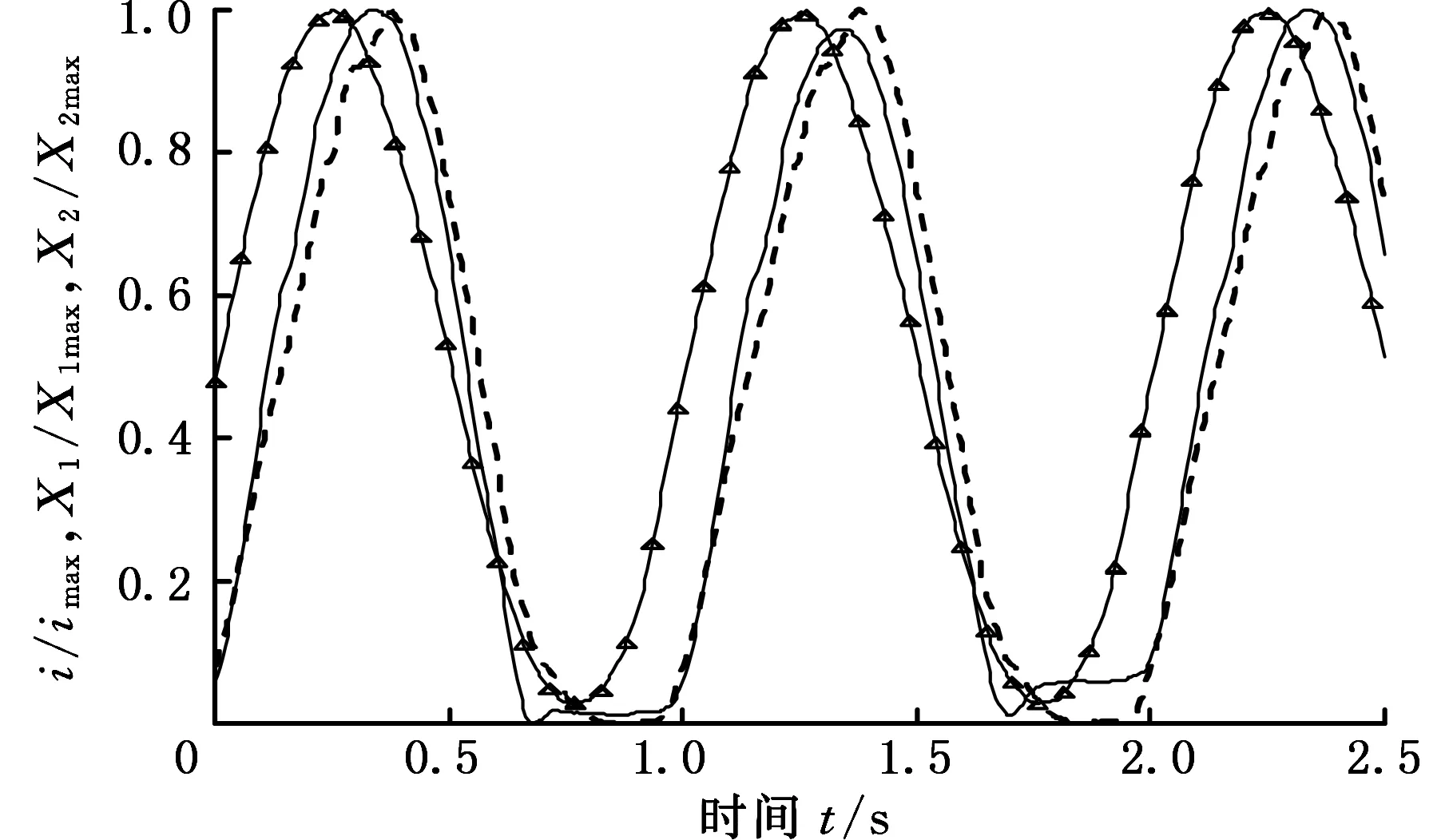
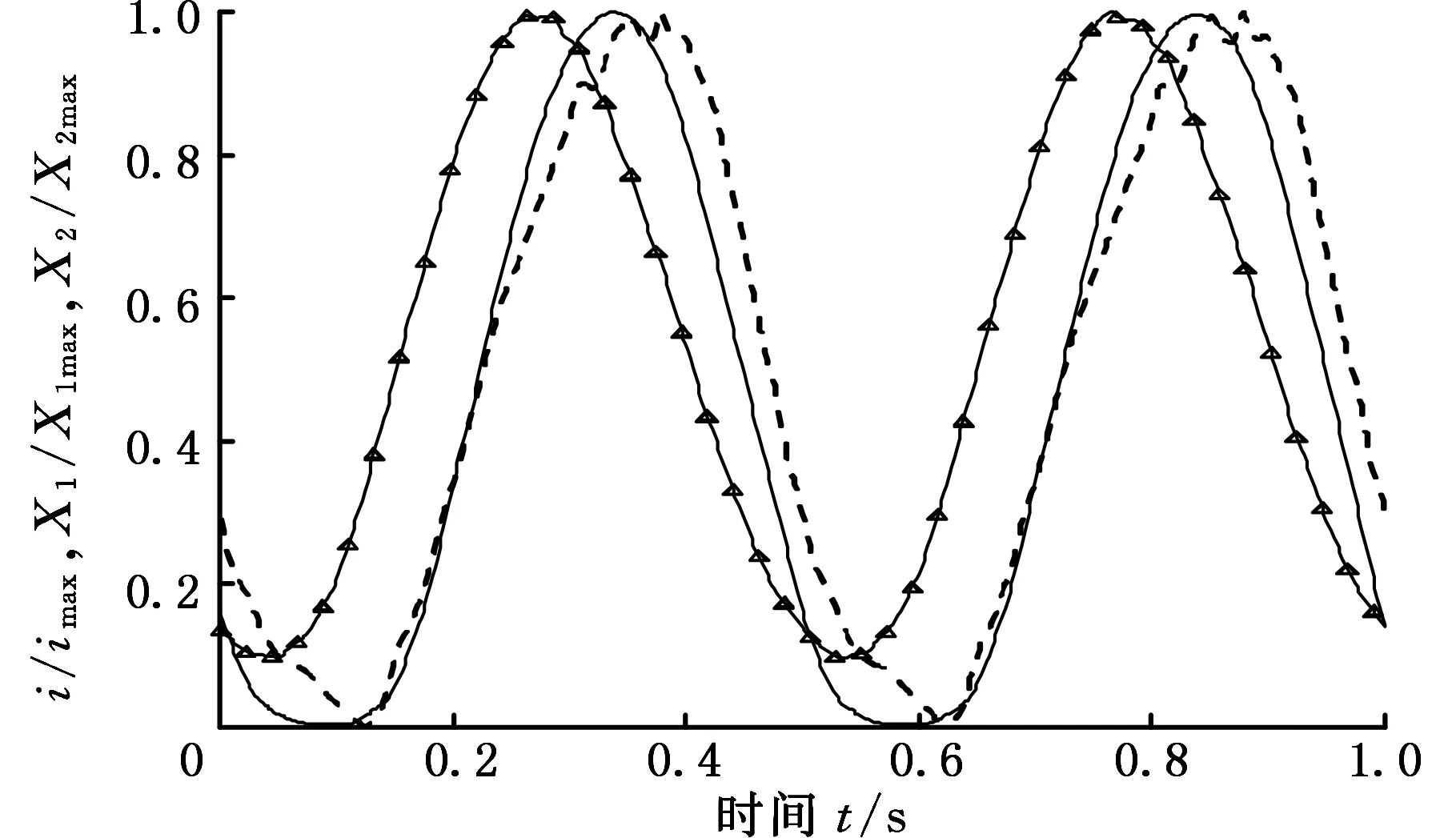
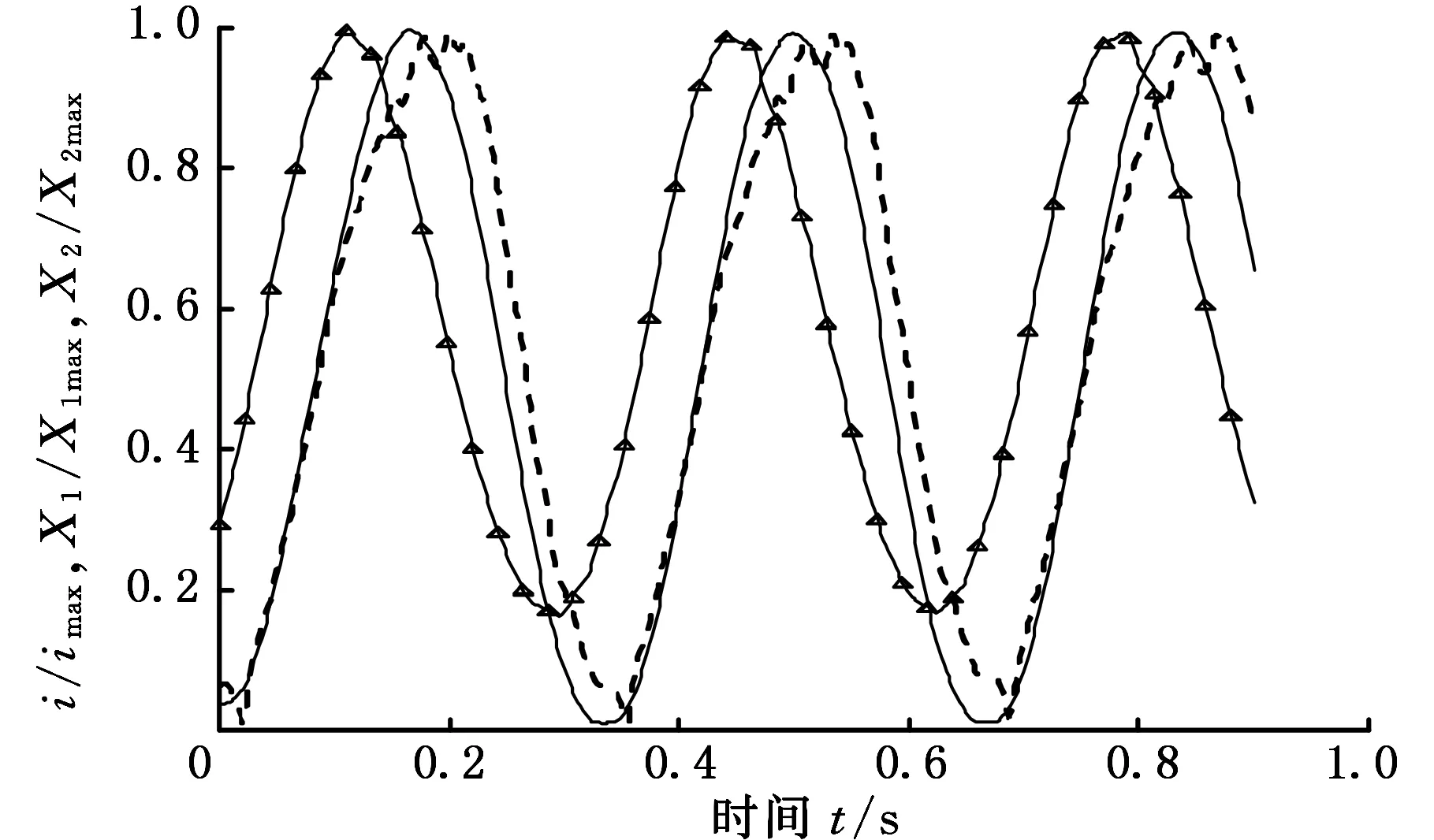
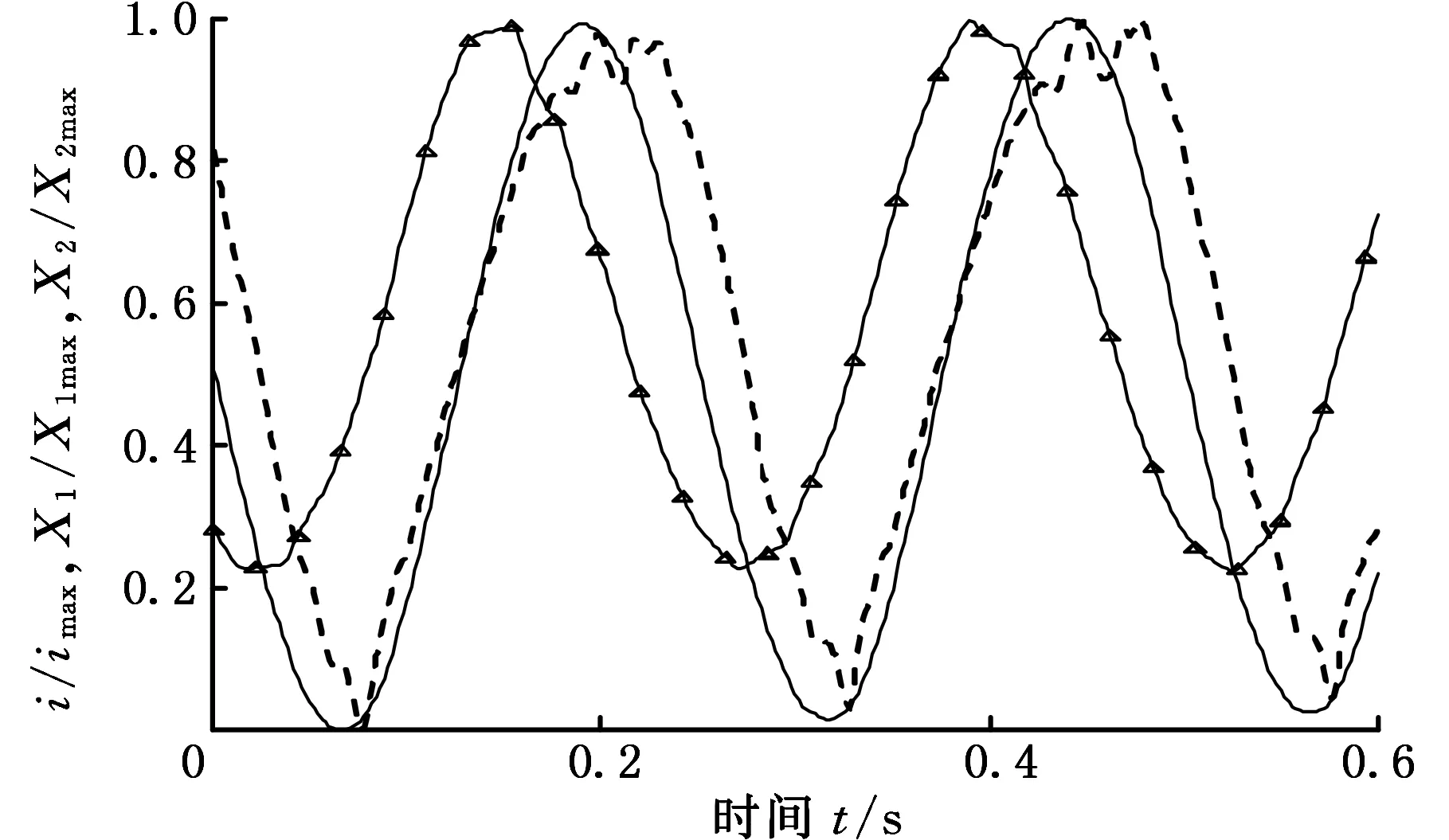
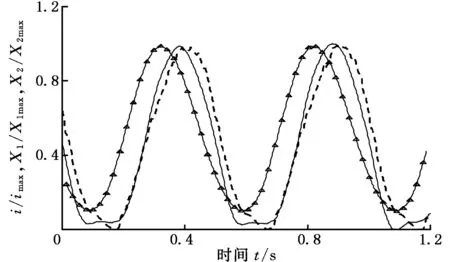
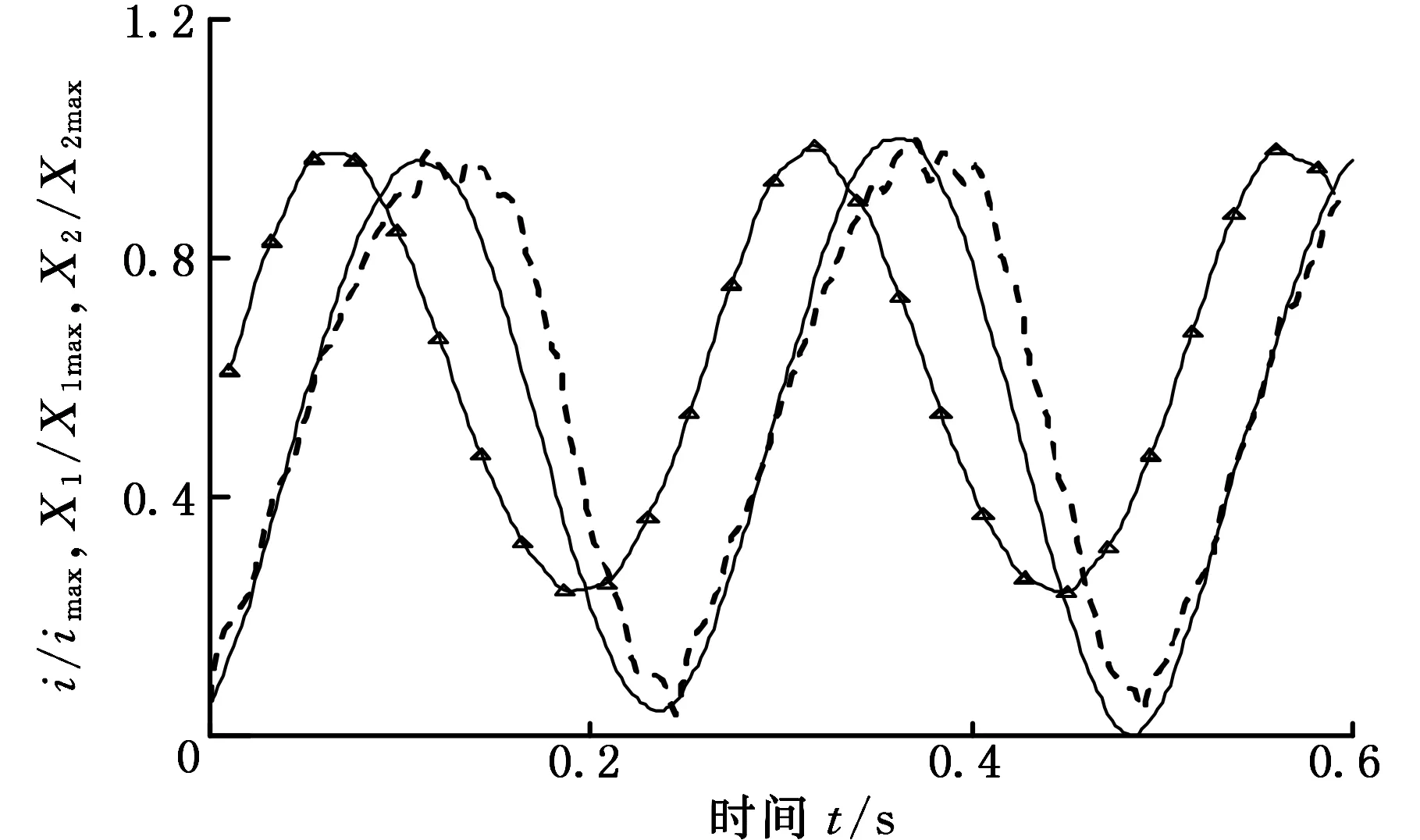
系统调零后,关闭1号、2号和3号截止阀,打开4号和5号截止阀, 输入频率为1 Hz的正弦信号,使阀芯开口为25%,调节系统压力为28 MPa,待示波器出现稳定的流量信号,最大流量约为210 L/min时,保存输入和输出信号。再依次改变输入信号的频率,得到如图12所示的阀频率跟随特性图。为了验证叠加颤振信号对频率特性的影响,通过调节颤振信号的幅值与频率,得到如图12所示的频率跟随特性图,对比可知,其阀芯输出位移X2与电磁铁输入位移X1之间的跟随效果更加紧密,其频率跟随特性得到改善。从图13可知,当输入电流频率信号为4 Hz时,阀芯输出位移X2和电流输入信号相位滞后约为90°,故该阀-90°频率为4 Hz左右。
6 结论
(1)该阀利用压扭放大驱动技术将比例电磁铁对阀芯的驱动力放大,弥补了传统直动式比例换向阀因液动力无法实现高压大流量控制的不足,结构巧妙,易于实现插装式分布。
(2)在阀芯运动因为受卡紧力或摩擦力等非线性阻力不能工作时,压扭联轴器力放大系数kf的值大约为20,能极大地克服卡紧力或摩擦力等非线性因素对比例特性的影响。主阀P-A处与导控级压力分布和流场分布仿真表明了导控级控制实时性强,与理论分析相符合。
(3)主阀稳态液动力远大于电磁铁最大推力,压扭联轴器有效地放大了电磁力,阀的阶跃响应约为0.35 s,-90°频率为4 Hz左右,叠加一定频率颤振信号对改善阀的阶跃响应不明显,但能较好地保证阀芯位移与电磁铁位移之间的跟随性,因此,如果提高比例电磁铁的动态特性,阀的动态特性将得到最大限度的提高,该阀具有一定的工程应用价值。
(a)输入信号频率为1 Hz时阀频率跟随特性图
(b)输入信号频率为2 Hz时阀频率跟随特性图
(c)输入信号频率为3 Hz时阀频率跟随特性图
(d)输入信号频率为4 Hz时阀频率跟随特性图

图12 无叠加颤振电流时2D电液比例换向阀频率跟随特性
Fig.12 Frequency follow-up characteristic of 2D electro-hydraulic proportional valve without superimposing chatter current

(a)输入信号频率为1 Hz时阀频率跟随特性图
(b)输入信号频率为2 Hz时阀频率跟随特性图
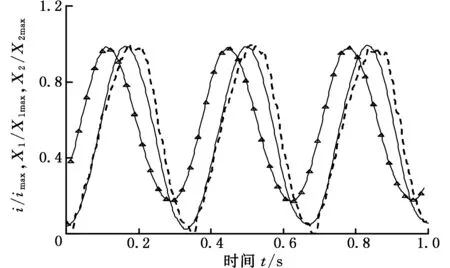
(c)输入信号频率为3 Hz时阀频率跟随特性图
(d)输入信号频率为4 Hz时阀频率跟随特性图

图13 叠加颤振电流时2D电液比例换向阀频率跟随特性
Fig.13 Frequency follow-up characteristic of 2D electro-hydraulic proportional valve when superimposing chatter current
[1] CRISTOFORI D, VACCA A. The Modeling of Electrohydraulic Proportional Valves[J]. Journal of Dynamic Systems Measurement and Control,2012,134(3):1-13.
[2] ERYILMAZ B, WILSON B H. Unified Modeling and Analysis of a Proportional Valve[J]. Journal of the Franklin Institute,2006,343(1):48-68.
[3] 吴根茂,邱敏秀,王庆丰,等. 实用电液比例技术[M]. 杭州:浙江大学出版社,2006. WU Genmao, QIU Minxiu, WANG Qingfeng, et al. Practical Electro-hydraulic Ratio Technology [M]. Hangzhou: Zhejiang University Press,2006.
[4] AMIRANTE R, MOSCATELLI P G, CATALANO L A. Evaluation of the Fow Forces on a Direct (Single Stage) Proportional Valve by Means of a Computational Fuid Dynamic Analysis[J]. Energy Conversion and Management,2007,48(3):942-953.
[5] VANGHAN N D, GAMBLE J B. The Modeling and Simulation of a Proportional Valve[J]. ASME Journal of Dynamic Systems, Measurement and Control,1996,118:120-125.
[6] 王恒,张俊杰,王永泉,等. 考虑反向器影响的滚珠丝杠副摩擦力矩计算模型[J]. 机械工程学报,2016,52(7):97-103. WANG Heng, ZHANG Junjie, WANG Yongquan, et al. A Calculation Model for Friction Torque of Ball Screws Considering the Influence of Reversers[J]. Chinese Journal of Mechanical Engineering,2016,52(7):97-103.
[7] 刘国文,阮健,左希庆,等. 滚轮压扭型 2D 电液比例方向阀特性分析[J]. 农业机械学报,2016,47(5):401-406. LIU Guowen, RUAN Jian, ZUO Xiqing, et al. Characteristic Analysis of 2D Electro-hydraulic Proportional Directional Valve with Roller Thrust-torsion Coupling [J]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(5):401-406.
[8] 李胜, 阮健, 孟彬. 二维电液比例换向阀动态特性及稳定性分析[J]. 机械工程学报,2016,52(2):202-212. LI Sheng, RUAN Jian, MENG Bin, et al. Two-dimensional Electro-hydraulic Proportional Directional Valve[J]. Chinese Journal of Mechanical Engineering,2016,52(2):202-212.
[9] RUAN J, BURTON R, UKRAINETZ P. An Investigation into the Characteristics of a Two Dimensional“2D”Flow Control Valve[J]. Journal of Dynamic Systems, Measurement,2002,124:214-220.
[10] 左强,李胜,阮健. 2D 电液比例方向阀弹性压扭联轴器研究[J].农业机械学报,2014,45(5):327-333. ZUO Qiang,LI Sheng,RUAN Jian. 2D Electro-hydraulic Proportional Directional Valve Elastic thrust Torsion Coupling[J].Transactions of the Chinese Society for Agricultural Machinery,2014,45(5):327-333.
[11] 谢鲲,安子良,苏琦.电液比例阀的设计及动态特性研究[J].煤矿机械,2016,37(2):33-35. XIE Kun,AN Ziling,SU Qi. Design of Electro-hydraulic proportional Valve and Dynamic Characteristics of Research[J]. Coal Mine Machinery,2016,37(2):33-35.
(编辑王艳丽)
DynamicCharacteristicsof2DElectro-hydraulicProportionalDirectionalValveswithaBall-screwTypeAxialCompression-torsionCoupling
ZUO Qiang1LU Qianqian1,2LI Sheng2XING Tong2RUAN Jian2
1.School of Engineering,Zhejiang University City College, Hangzhou,310015 2.Key Laboratory of Special Purpose Equipment and Advanced Processing Technology, Ministry of Education,Zhejiang University of Technology, Hangzhou,310014
A ball-screw type axial compression-torsion coupling was proposed herein. This design achieved an output force amplifications for about 20 times, which effectively overcome the disadvantages of small flows of proportional directional valves caused by proportional solenoid magnetic saturation. The coupling connected 2D directional valves and proportional electromagnets by compression-torsion amplification drive technology. The electromagnetic forces were transformed into the pressure differences from both ends of the spools, which was sufficiently capable of overcoming the frictional forces, clamping forces and nonlinear hydrodynamic forces etc. The pressure distribution and flow field distribution from the main valve P-A and the pilot stage, the steady-state fluid force were simulated and analyzed. Theoretical and experimental studies show that the compression-torsion coupling effectively enlarges the electromagnetic forces. The step response of the valves is about 0.35 s, and the frequency characteristics at -90° is about 4 Hz at a flow rate of about 210 L/min. The step characteristics is not improved obviously by superposing dithering, but the latter may effectively satisfy the following features between the spool displacement and the electromagnet displacement.
2D valve; compression-torsion coupling; proportional valve; proportional electromagnet
2017-04-17
国家自然科学基金资助项目(51605430)
TH137
10.3969/j.issn.1004-132X.2017.17.006
左强,男,1986年生。浙江大学城市学院工程学院讲师、博士。主要研究方向为电液直接数字控制。发表论文10余篇。陆倩倩,女,1985年生。浙江大学城市学院工程学院讲师、博士研究生。李胜,男,1968年生。浙江工业大学机械学院教授、博士。邢彤,男,1969年生。浙江工业大学机械学院教授、博士。阮健(通信作者),男,1963年生。浙江工业大学机械学院教授、博士研究生导师。E-mail:wxmin@mail.hz.zj.com。