导弹自动驾驶仪控制算法鲁棒性研究*
2017-09-12屈秀敏刘珊中刘永斌
屈秀敏,刘珊中,刘永斌
(河南科技大学信息工程学院,河南 洛阳 471023)
导弹自动驾驶仪控制算法鲁棒性研究*
屈秀敏,刘珊中,刘永斌
(河南科技大学信息工程学院,河南 洛阳 471023)
以某型轴对称导弹为研究对象,在解耦和线性化的情况下,得到简化的数学模型。通过求解线性矩阵不等式(LMI)设计了状态反馈H∞控制导弹自动驾驶仪,采用模糊和变论域理论设计了变论域模糊PID控制自动驾驶仪。考虑飞行过程中的干扰、气动参数摄动,对两种自动驾驶仪的控制性能进行对比研究,仿真结果表明,二者皆能实现对导弹制导指令的有效跟踪,其中状态反馈H∞控制设计的自动驾驶仪在指令跟踪的快速性、准确性和抗干扰性上具有明显的优越性。
线性矩阵不等式,变论域,模糊控制,自动驾驶仪,鲁棒性
0 引言
导弹控制系统中的气动参数随着导弹飞行速度、飞行高度,以及战场环境等的改变会发生剧烈变化,这种不确定性的变化会严重影响导弹控制系统的性能。为了实现制导指令的精确跟踪,及时修正偏差,使导弹运行在期望的轨道上,这就要求设计的导弹自动驾驶仪应该具有很强的鲁棒性和抗干扰性。
本文在弹道特征点上设计了基于线性矩阵不等式(LMI)的状态反馈H∞控制导弹自动驾驶仪,在模糊控制的基础上,引入伸缩因子设计了变论域模糊PID控制自动驾驶仪,通过研究两种自动驾驶仪的指令跟踪性能和鲁棒性,以期找到更适合于导弹自动驾驶仪的设计方法。
1 导弹数学模型的建立
将导弹的模型分为3个通道,即俯仰通道、偏航通道和滚转通道,并假设:①视导弹弹体为刚体;②忽略重力及推力偏心的影响;③采用系数冻结法,在所研究的弹道特征点上的所有动力学参数、运动学参数等视为常数;④攻角和侧滑角均视为小量;⑤忽略舵机非线性的影响,用一阶惯性环节代替每个通道的实际舵机模型[1-2]。
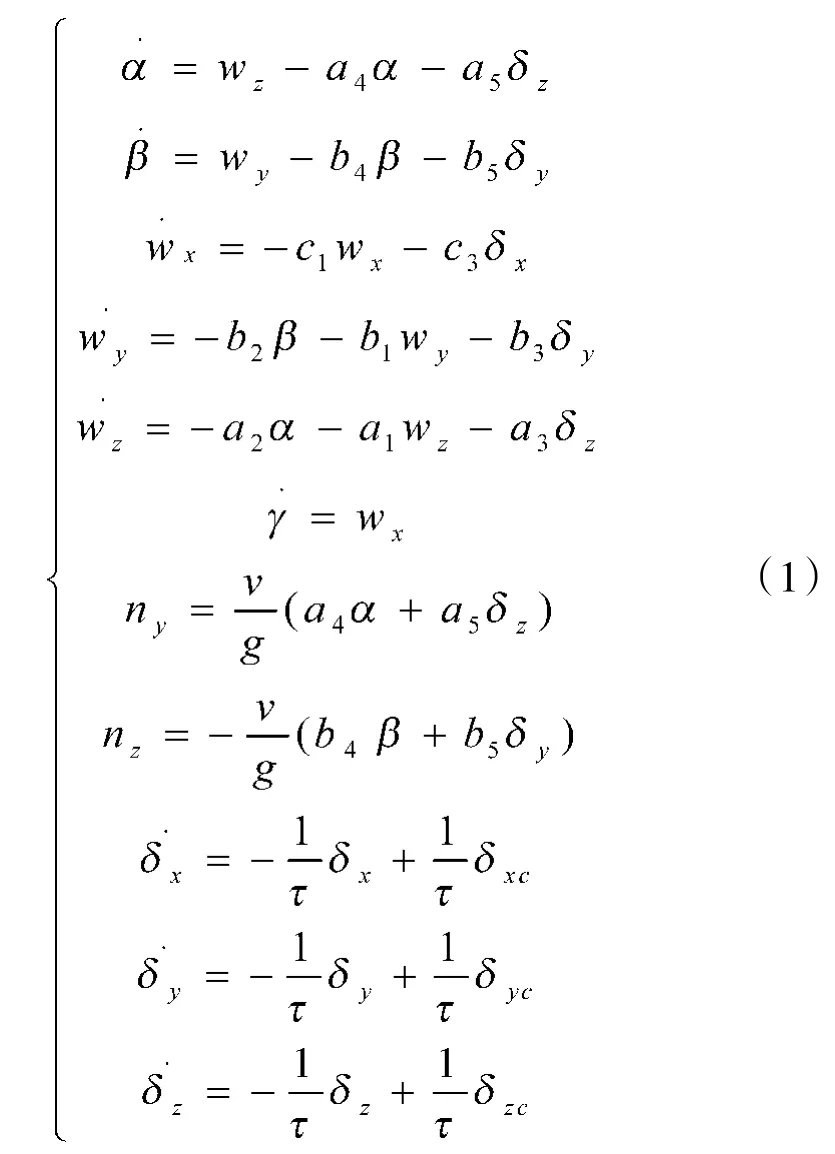
基于以上假设,以某型轴对称导弹为研究对象,在解耦和线性化的情况下简化的数学模型如式(1)所示:
将式(1)转化为三通道相应的传递函数如式(2)所示:
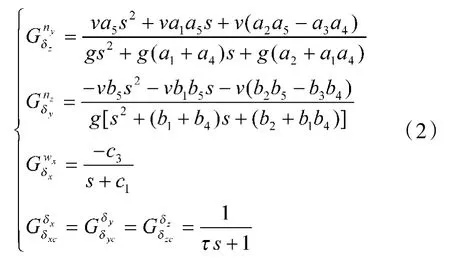
式(1)和式(2)中:a1、a2、a3、a4、a5、b1、b2、b3、b4、b5、c1、c3为弹体的动力学系数,α为攻角,β为侧滑角,γ为滚转角,wx、wy、wz为三通道的角速度,ny为俯仰过载,nz为偏航过载,δxc、δyc、δzc为舵偏角指令,δz、δy、δz为实际舵偏角;为舵机的时间常数。
2 状态反馈H∞控制自动驾驶仪设计
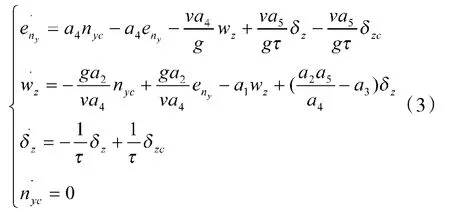
自动驾驶仪的设计目标是保证弹体俯仰通道过载ny准确跟踪俯仰过载指令nyc,偏航过载nz准确跟踪偏航过载指令nzc,弹体滚转角γ准确跟踪滚转角指令 γc,故重新定义了 3 个误差 eny,enz,er作为俯仰、偏航和滚转通道中的一个新的状态变量,由于三通道自动驾驶仪(俯仰、偏航、滚转)是分开设计的,且每个通道的设计思路是相似的,以俯仰通道为例,具体设计过程如下[3-4]。
式(3)的增广被控对象为式(4):
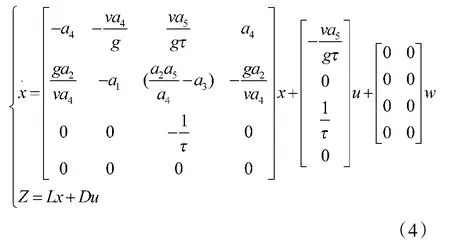
设计静态状态反馈控制器u=kx使得相应的闭环系统(5)是渐进稳定的:
定理[9]:对于系统(5),存在一个状态反馈 H∞控制器,当且仅当存在一个对称正定矩阵X和W,使得式(6)的矩阵不等式
成立,进而,如果矩阵不等式(6)存在一个可行解X和W,那么是系统(5)的一个状态反馈H∞控制器。
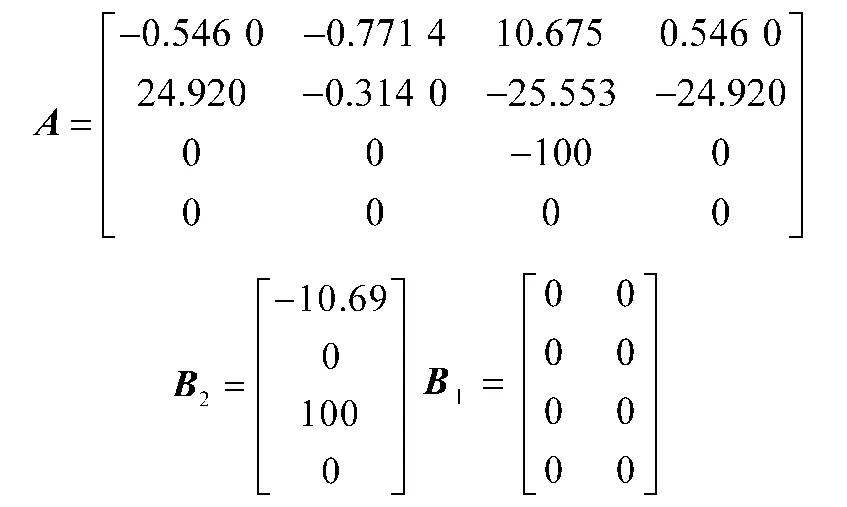
代入某型轴对称导弹俯仰通道特征点的参数可得:


3 变论域模糊PID控制自动驾驶仪设计
在模糊控制的基础上,引入伸缩因子设计导弹自动驾驶仪,这样在原有专家经验总结的控制规则不变的情况下,变量论域会随着误差的变化进行相应的伸缩变化。该模糊自动驾驶仪以俯仰过载量的误差e和误差的变化率ec作为输入,作为其输出。并且偏差的基本论域定为[-E,E],偏差变化率的基本论域为[-Ec,Ec],输出量的基本论域为[-U,U],最终通过多次试验可以确定其最终的论域。使用模糊推理对PID参数的模糊矩阵进行设计,进而对PID参数进行实时调节,如式(7)所示:
3.1 模糊控制规则
自动驾驶仪输入量的误差e基本论域设定为[-6,6],模糊论域为[-3,3],误差的变化率 ec的基本论域设定为 [-6,6],模糊论域为 [-6,6]。输出量的基本论域设定为[-3,3],模糊论域为[-0.3,0.3]。该自动驾驶仪输入和输出语言变量的模糊子集为,自动驾驶仪的输入与输出的隶属度函数选用三角形的,控制规则选择Mamdani型。本文所采用的控制规则有49条,如表1所示。模糊规则表

表1
3.2 伸缩因子的选择
函数为论域 X=[-E,E]的一个伸缩因子[10]。经过反复试验,俯仰通道选取基于比例指数函数模型的伸缩因子,输入变量e和ec的伸缩因子均选取为α,如式(8)所示:
多次试验得出,1、2为 0.5。输出变量 Kp、Ki、Kd的伸缩因子选取统一为β,如式(9)所示:
输出变量的伸缩因子选取1、2为0.5,加入伸缩因子后输入论域为时,输出论域变为。
3.3 模糊PID参数的确定
经多次实验验证,以阶跃信号下的系统响应作为依据来评价导弹自动驾驶仪的控制性能,以能够使控制性能达到最佳作为最终的量化因子和比例因子。

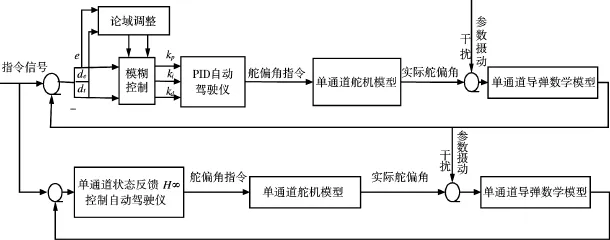
图1 导弹自动驾驶仪鲁棒性对比仿真研究框图
4 仿真分析
根据上述设计的状态反馈H∞控制导弹自动驾驶仪和变论域模糊PID控制自动驾驶仪,引入舵机模型,搭建俯仰通道导弹自动驾驶仪鲁棒性对比仿真研究结构图,要求δmax≤45°,考虑导弹飞行过程中遇到的各种干扰,以及存在的参数摄动,对前述所设计的两种导弹自动驾驶仪的指令跟踪能力和抗干扰性进行对比研究[5-6],Sumilink仿真结构框图如图1所示。
①俯仰通道过载指令采用阶跃信号进行仿真,幅值为10,干扰信号采用脉冲信号Amplitude为0.25,period(secs)为 10,Pulse Width 为 5,phase delay(secs)为0,无气动参数摄动时的仿真结果如图2所示。
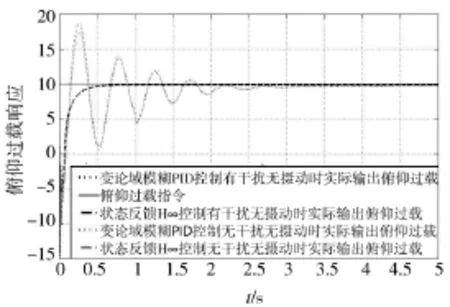
图2 有干扰无摄动时自动驾驶仪的控制性能仿真对比图
②俯仰通道过载指令采用阶跃信号进行仿真,幅值为10,干扰信号采用脉冲信号Amplitude为0.25,period(secs)为 10,Pulse Width 为 5,phase delay(secs)为0,所有的气动参数摄动原来的+2豫时的仿真结果如图3所示。
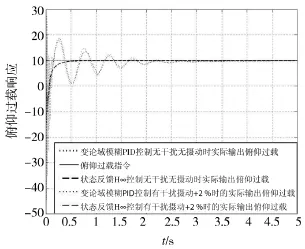
图3 有干扰摄动+2豫时自动驾驶仪的控制性能仿真对比图
③俯仰通道过载指令采用阶跃信号进行仿真,幅值为10,干扰信号采用脉冲信号Amplitude为0.25,period(secs)为 10,Pulse Width 为 5,phase delay(secs)为 0[7-8],所有的气动参数摄动原来的 -2 豫时的仿真结果如图4所示。
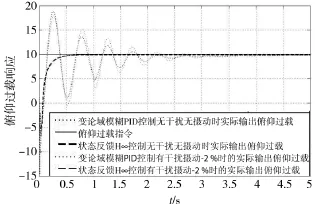
图4 有干扰摄动-2豫时自动驾驶仪的控制性能仿真对比图
5 结论
以某型轴对称导弹为研究对象,在解耦和线性化的情况下,得到简化的数学模型,通过选择合适的状态变量,设计了基于线性矩阵不等式的状态反馈H∞控制导弹自动驾驶仪;其次,将各通道的状态方程转化为其相应的传递函数,在模糊控制的基础上引入伸缩因子,设计了变论域模糊PID控制自动驾驶仪;引入舵机模型,对两种自动驾驶仪的控制性能进行对比研究,从仿真结果来看,二者皆能实现对导弹制导指令的有效跟踪,但是,前者设计的导弹自动驾驶仪在指令跟踪时的调节时间短,动态响应速度快,对气动参数摄动和导弹飞行过程中遇到的干扰具有较好的抑制作用。所以,基于线性矩阵不等式的状态反馈H∞控制算法鲁棒性强,更适合于导弹的姿态控制。
[1]贾杰,刘连章,曹琦.导弹解耦控制方法综述[J].航空兵器,2010,6(3):18-21.
[2]汤柏涛,董斌,于云峰.BTT导弹滚转通道模型参考变结构自动驾驶仪设计[J].计算机测量与控制,2011,19(1):105-107.
[3]潘琢金,郭效哲,毛艳娥,等.导弹自动驾驶仪改进遗传模糊控制器设计 [J].火力与指挥控制,2014,39(11):137-145.
[4]GAN X S,TANG X Q.Misslie autopilot design based on fuzzy self-tuning immune PID control[J].Advanced Materials Research,2013,739:550-554.
[5]程高辉,周军.积分模糊变结构控制的导弹侧向自动驾驶仪设计[J].火力与指挥控制,2009,34(2):87-89.
[6]林德福,孙彩英.H∞理论在BTT导弹自动驾仪设计中的应用[J].系统仿真学报,2010,22(4):991-995.
[7]周卫文,梁晓庚,崔彦凯.空空导弹增益调度鲁棒H∞控制自动驾驶仪设计[J].计算机测量与控制,2013,21(1):136-138.
[8]于秀萍,官双英.基于H∞控制理论的BTT导弹自动驾仪设计[J].系统工程与电子技术,2008,30(5):905-908.
[9]俞立.线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[10]潘永平,王钦若.变论域自适应模糊PID控制器[J].电气自动化,2007,29(3):9-11.
Research on Robustness of Missile Autopilot Control Alogorithm
QU Xiu-min,LIU Shan-zhong,LIU Yong-bin
(School of Information Engineering,Henan University of Science and Technology,Luoyang 471023,China)
Taking a certain type of axis symmetrical missile as the research object ,a simplified mathematical model is obtained in the case of decoupling and linearization.The state feedback H∞control missile autopilot is designed by solving linear matrix inequality (LMI),and the variable universe fuzzy PID control autopilot is designed by using fuzzy and variable universe theory.Considering the disturbance and the perturbation of aerodynamic parameters during flight,a comparative study is carried out on the control performance of the both autopilots.The simulation results show that both of them can achieve tracking of the missile guidance command effectively,especially the state feedback H∞control missile autopilot has obvious advantages in rapidity and accuracy of the command tracking and anti-interference.
linear matrix inequality,variable universe,fuzzy control,autopilot,robustness
TJ765
A
10.3969/j.issn.1002-0640.2017.08.012
1002-0640(2017)08-0052-05
2016-06-14修回日期:2016-07-16
国家自然科学基金(61203047);河南省教育厅自然科学基金资助项目(12A120004)
屈秀敏(1990- ),女,河南新乡人,硕士。研究方向:导弹控制算法研究。
