基于图像和惯性的头盔组合跟踪原理*
2017-09-12黄丽琼周立勇尚婷婷
黄丽琼,周立勇,尚婷婷
(西安北方光电科技防务有限公司,西安 710043)
基于图像和惯性的头盔组合跟踪原理*
黄丽琼,周立勇,尚婷婷
(西安北方光电科技防务有限公司,西安 710043)
不同体制的头盔跟踪定位技术单独使用时都存在一定的原理性性能制约,提高跟踪定位技术整体性能的有效途径是采用组合跟踪。目前综合性能较好的是图像式头盔跟踪,图像式跟踪技术精度高,输出数据平稳,稳定性好,但其缺点是头盔活动范围受制于CCD摄像机视场及头盔大角度转动时头盔本身对CCD摄像机视角的遮挡。惯性跟踪不需要任何外来信息也不向外辐射任何信息,可在任何介质和任何环境条件下实现360°全范围头部跟踪,但其定位精度随时间下降。提出的基于图像和惯性的头盔组合跟踪技术充分利用图像跟踪精度高、长期稳定性好及惯性定位跟踪范围广、跟踪系统简单的优点,达到单个跟踪定位体制不具备的综合性能。
惯性头盔跟踪,MEMS惯性传感器,头盔组合跟踪
0 引言
头盔跟踪定位技术目前主要有电磁式和图像式两种,由于国内飞机座舱电磁环境的复杂性,电磁式较难满足头盔跟踪精度需求,国内头盔显示器一般采用图像式跟踪方式,即利用传感器实时拍摄头盔定位LED阵列的位置,经过图像处理进行空间位置解算,实时计算头部位置信息,从而获取头盔视线相对于飞机轴线的空间角度。
图像式头盔跟踪方式在性能发展方面有以下瓶颈:①由于对CCD摄像机视场的依赖,头盔活动必须限制在一定范围之内;②头盔上用以图像定位解算的LED阵列在头盔大角度转动时头盔本身遮挡了CCD摄像机的视角。
上述问题是由图像式头盔跟踪基本原理造成的,在原有技术基础上难以解决,最近发展起来的MEMS惯性技术使得上述问题的解决有了转机。MEMS惯性传感器体积小、重量轻、易集成的特点可使其应用于头盔跟踪,MEMS惯性传感器最大优点是活动范围无限制,缺点则是精度有待提高,目前MEMS陀螺漂移在 10°/h以上,累积误差较大[1-2]。MEMS惯性传感器的性能特点使得MEMS惯性跟踪与图像头盔跟踪在性能上形成互补,可以在飞机座舱驾驶员有限的头部活动框及有限视场内进行高精度图像式跟踪,而在其余的超出图像定位头部活动框及视场的范围内使用MEMS惯性技术跟踪,不受转动角度和位移范围限制,实现全方位定位,同时图像跟踪有效时可以实时校准惯性跟踪姿态,从而减小惯性解算的累积误差,提高在大视场范围内的解算精度。
1 惯性头盔跟踪子模块算法模型
在下面惯性算法模型描述中,n为导航坐标系、b为载体坐标系(MEMS惯性传感器坐标系),e为地球坐标系表示,i为惯性坐标系。其具体流程如图1所示。

图1 惯性头盔跟踪子模块算法流程图
坐标系之间的转动关系由方向余弦表示,如:b系相对于n系的方向余弦矩阵表示为Cbn,b系相对于n系转动的角度表示为方位ψ、俯仰θ和横滚γ,则方向余弦矩阵与转动角度的关系由式(1)确定:

b系相对于n系的方向余弦矩阵变化率表示为Cbn',方向余弦变化率与方向余弦的关系由式(2)确定[3-4]:

若b系相对于n系的角速率矢量用ωbnb表示,角速率矢量ωbnb的3个角速度分量表示为(ωnbx,ωnby,ωnbz),则式(2)中的 Ωbnb与角速率矢量 Ωbnb的关系由式(3)确定:

ωbnb由式(4)计算得到:
式中:Cnb是Cbn的转置,;Ω为地球自转速率;L为当地纬度;R0为地球半径;h为距地球表面的高度;为地速的3个分量;b系相对于i系的角速率矢量由MEMS传感器测量得到;fb为载体坐标系的比力加速度,由MEMS传感器加速度计测量得到;r=R0+h。
2 图像式头盔跟踪子模块算法模型
图像式头盔跟踪定位的原理是通过CCD红外摄像机测量头盔上红外发光二极管的位置,利用发光二极管在火控坐标系中的位置,解算头盔的姿态信息。
已知空间3点p1(x1,y1,z1)、p2(x2,y2,z2)和p3(x3,y3,z3),由空间解析几何知,3点可以确定一个平面方程。该平面在空间的方向可以用它的法向矢量来表示。设表示平面上的两个矢量,且:


将式(10)展开并整理,得

这样平面的方向数A,B,C为

由平面的方向数,可以求得平面法矢在空间中的角度(以右手系为准),若采用火控坐标系,设:法矢在xoy平面的投影与坐标轴正向的夹角为方位角α,法矢与yoz平面的夹角为俯仰角β,法矢与xoz平面的夹角为横滚角γ,则
由此,最后求得了所要求的方位角、俯仰角、横滚角。
3 惯性/图像头盔组合跟踪程序
基于图像和惯性的头盔组合跟踪技术在图像式跟踪子系统和惯性跟踪子系统独立运行的基础上,依据下述流程进行组合跟踪输出。其流程图如图2所示。
首先,惯性头盔跟踪子模块进行计算。MEMS惯性传感器周期探测并发送惯性数据到惯性头盔跟踪子模块;若MEMS惯性数据已准备好,计算载体坐标系b相对于导航坐标系n的角速度矢量,式中为MEMS惯性传感器实时测量值;,静态环境下,当地纬度L已知,地球自转角速率Ω为7.292 115×10-5rad/s。

图2 惯性/图像头盔组合跟踪方式流程图
4 仿真测试及性能分析
仿真测试分为对惯性头盔跟踪子模块的定位精度和短时角度漂移的测试以及基于图像和惯性的头盔组合跟踪技术在模拟实际座舱中飞行员的视界范围的全状态精度仿真测试。
4.1 惯性头盔跟踪子模块性能仿真测试
仿真测试中设定惯性坐标系 I系(x,y,z)分别对应(北纬 0°,东经 90°,天),导航坐标系 N 系(x,y,z)分别对应(北,东,地)。仿真测试地点经纬度为北纬 34°16'32.9'',东经 109°0'29.2''[5]。将安装有MEMS惯性传感器的惯性跟踪模块安装在六轴台上,使初始位置轴(x,y,z)指向(西,北,地)。采样周期为20 ms,使用小波变换 sym4 滤波[6-7],分别在静止状态和运动状态下,达到稳定状态后采样4 000组数据,仿真测试惯性跟踪系统定位精度及漂移情况。
下页图3是静止状态下MEMS惯性传感器其中一轴陀螺仪在经过小波滤波后的角速率输出及80 s的静止过程中角度漂移。此时陀螺仪的零偏为0.001 08°/s,零偏稳定性为 0.007°/s,80 s积分角度漂移<0.2°。
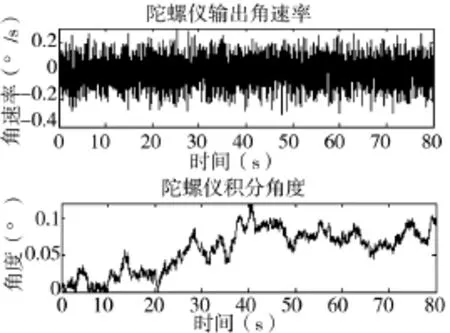
图3 静止状态陀螺仪x轴输出角速率及积分角度

图4 运动状态下陀螺仪x轴输出角速率及积分角度
图4是运动状态下MEMS惯性传感器其中一轴陀螺仪在经过小波滤波后的角速率输出及在运动停止后静止的80 s过程中角度漂移。在六轴测试台转动30°时,惯性跟踪解算为29.563 96°,80 s角度漂移为0.160 58°。经上述仿真测试表明,单独的惯性跟踪精度及短时间内角度漂移较小,这是基于图像和惯性的头盔组合跟踪技术实现的关键因素。
4.2 基于图像和惯性的头盔组合跟踪性能仿真测试
基于图像和惯性的头盔组合跟踪性能仿真测试在试验室六轴测试台上进行,仿真测试模拟飞机座舱在驾驶员眼位附近的转动范围和位移范围内使用成熟的高精度图像式头盔跟踪子模块,如眼位附近方位120°的视场范围及头部的400 mm×400 mm×200 mm活动框范围。在其余的头部不经常到达的大视场范围内使用MEMS惯性头盔跟踪子模块,并在图像跟踪计算有效时实时对惯性跟踪进行校正,减小惯性解算的累积误差,提高在大视场范围内的解算精度。
头盔跟踪综合仿真测试选取20个测试点进行头部视界范围和跟踪精度综合仿真测试。测试点的选取要求兼顾实际座舱中飞行员的视界范围。仿真测试结果方位角误差和俯仰角误差分别如图5、图6所示。20个点的均方根误差≤6 mrad。

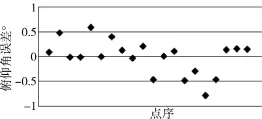
图4 20个测试点方位角误差
5 结论
图像式头盔跟踪技术在国内已成熟应用于各类型飞机上,该技术定位精度高、数据长期稳定性好,在一定时期内满足战术飞行需要。但在定位精度要求日益提高和头盔活动范围日益扩大的需求下,组合式头盔跟踪技术弥补了图像式跟踪技术的缺陷。本文验证了单独惯性头盔跟踪的定位精度及短时角度漂移能基本满足头盔定位性能需求,这是基于图像和惯性的头盔组合跟踪技术实现的先决条件。而其360°全范围的定位优点和长期稳定性差的缺点和图像式跟踪方式形成互补,从而基于图像和惯性的头盔组合跟踪技术具备了两组定位方式的优点,同时使测量值冗余,提高整个系统的可靠性。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005:15-28.
[2]肖昌怡.基于MEMS的导航系统设计与实现[D].哈尔滨:哈尔滨工程大学,2010.
[3]MILLER R.A new strapdown attitude algorithm[J].Journal of Guidance,Control,and Dynamics,1983,6(4):287-291.
[4]DAVID H T,JOHN L W.Strapdown inertial navigation technology[M].Cornwall:Printed in the UK by MPG Book Limited,Bodmin,2004
[5]尚婷婷,黄丽琼,喻娜,等.基于ADIS16375的误差补偿在姿态解算中的研究[J].火力与指挥控制,2016,41(7):121-124.
[6]蒋庆仙,吴富梅.基于小波阈值消噪的光纤陀螺信号的抗差估计[J].惯性技术学报,2009,22(11):1596-1601.
[7]张煦.惯性平台陀螺仪静态漂移系数分离方法研究[J].上海航天,2002,19(1):23-25.
Integration Tracking Techniques of Helmet Based on Image and Inertia
HUANG Li-qiong,ZHOU Li-yong,SHANG Ting-ting
(Xi’an North Electro-Optic Science and Technology Defense Co.,Ltd,Xi’an 710043,China)
There are some of principle constraints to the performance of different system of helmet tracking and positioning technology,the effective way to provide the overall performance of tracking and positioning technology is to combine some of them.Image helmet tracker system has the better comprehensive performance,but its disadvantage is that helmet activities subject to FOV and installation space in aircraft cockpit of the CCD sensor.Inertial tracking does not require any external information and does not radiate any information.It can achieve head tracking's 360°full range in any environment,but its position accuracy decreases with time.The combination of image and inertial helmet tracking technology proposed by this paper make full use of high accuracy,long-term stability in image tracking and wide range of tracking in inertial positioning.The combined tracking system is simple and can achieve the comprehensive performance that a single tracking system does not have.
inertial helmet tracking,MEMS inertial sensor,helmet integration tracking
V19
A
10.3969/j.issn.1002-0640.2017.08.040
1002-0640(2017)08-0179-04
2016-06-27
2016-10-19
总装备部装备预研基金资助项目(112010202)
黄丽琼(1970- ),女,湖南城步人,博士,研究员级高级工程师。研究方向:航空系统工程及火力控制。
