UAV目标跟踪预测算法研究∗
2017-09-12张鑫邓雯
张鑫邓雯
刘冰1,2
UAV目标跟踪预测算法研究∗
张鑫1邓雯2
(1.商洛学院电子信息与电气工程学院商洛726000)(2.西北工业大学自动化学院西安710072)
针对UAV采集视频图像在与地面站进行数据通信过程中,由于传输转换延迟等因素造成的目标脱靶量问题,首先采用基于Meanshift采样的辅助粒子滤波跟踪算法进行跟踪实验。该算法采用辅助变量粒子滤波算法作为跟踪的主体框架,利用Meanshift算法将辅助采样粒子转移到最佳位置。基于跟踪结果,采用Kalman滤波预测目标轨迹,再用预测结果来修正跟踪结果并解决脱靶量问题。结果表明,加入预测算法后的跟踪结果更加接近目标的真实值,可以满足UAV在工程实际应用中的需求。
无人机;目标跟踪;均值偏移;辅助变量粒子滤波;Kalman滤波
Class NumberTP391.4
1引言
现代战争中,实时战场信息的获取能力很大程度上影响着战争的胜负,因此如何提高战场信息的侦察能力和武器的精确打击能力是各国现代化军事建设的主要内容,而鉴于UAV在现代战争中的优异表现,研究UAV侦察制导技术已经成为研究精确打击能力的一个重要组成部分。而研究UAV目标实时跟踪是无人机侦查制导技术研究的关键。在实际应用中,目标实时跟踪不仅在军事领域上有重要的应用,在民用交通,灾害监测,国土安全和工业领域都有着广泛的应用。
无人机与指挥控制站之间的双向通信是通过数据链实现的。无人机数据链包括一条用于地面控制站对飞行器控制的上行链路和一条用于接收无人机遥测信息的下行链路。上行链路主要传输地面站至无人机的遥控指令,下行链路主要传输无人机至地面终端的遥测数据,一般下行链路的传输速率要远远高于上行链路[1]。UAV在执行侦查任务时,采集的视频图像通过地面站与数据链进行通信,将视频图像传回地面站,地面站操作人员将其进行处理,这个过程存在着一定的传输和转换延迟,导致目标的真实位置与在地面站接收到的图像上的显示位置存在一定的偏差,因此在执行目标捕获定位等任务时就需要对目标的运动轨迹进行预测。
目标自动跟踪以及预测是一体化的,为了验证本文所设计算法,设计对UAV采集视频进行系统的实验,首先选择跟踪目标,对提取的目标信息模板进行建模,采用基于Meanshift采样的辅助粒子滤波跟踪算法稳定的跟踪目标,基于跟踪结果,采用Kalman滤波预测目标轨迹,用预测结果来修正跟踪结果并解决数据链时延问题。
2基于Meanshift采样的辅助粒子滤波跟踪算法
2.1 AVPF算法
粒子滤波算法是一种从带噪声的数据中估计运动状态的技术,在状态空间中通过传播大量带权离散粒子来近似概率分布并递归。通常视频运动目标状态是非线性、非高斯的,粒子滤波算法由于其独特的优越性被广泛应用于目标跟踪领域。但是经典粒子滤波算法随着重采样的进行,可能会导致“粒子枯竭”现象。这就会导致粒子集的多样性变的很差,估计精度难以保证。而AVPF算法[3]可以很好地解决这一问题。在重采样前,AVPF依据似然值的大小对原粒子集中的各个权值进行修正,使得重采样以后的粒子向似然函数的值比较大的区域移动,避免了这一问题的产生。
联合密度函数p(xk,ξki-1| z0:k)可以表述为

选取重要性函数q(| xk,i z1:k)进行粒子采样,如式(2)所示:

其中,uik是在已知xik-1的情况下对uik~p(xk| xik-1)的某种统计信息,wk为高斯噪声且均值为0。按照重要性权值的方差最小原则,从分布中选取辅助粒子集{uik,wik}in
=1,取

其中xik-1为基于第k-1帧目标跟踪结果的状态采样粒子,βi是服从N(0,1)的随机数。
2.2 Meanshift算法
Meanshift算法[4~5]是一种高效无参密度估计的方法。该算法利用像素特征点概率密度函数梯度最优化方法,通过迭代快速收敛于概率密度函数的局部最大值,实现快速目标定位。
连旱天数和森林火险等级呈正相关,连旱天数增加,可燃物可燃性增加,对应的火险等级升高。反之,可燃物可燃性降低,对应的火险等级降低[6]。在祁连山东端青海云杉林中,连旱天数小于7d,一般不易引发森林火灾,连旱天数大于32d,则较容易引发森林火灾。
基于Meanshift算法的目标跟踪算法通过分别计算目标区域和候选区域内像素的特征值概率得到关于目标模型和候选模型的描述,然后利用相似函数度量初始帧目标模型和当前帧的候选模版的相似性,选择使相似函数最大的候选模型并得到关于目标模型的Meanshift向量,这个向量正是目标由初始位置向正确位置移动的向量。由于均值漂移算法的快速收敛性,通过不断迭代计算Meanshift向量,算法最终将收敛到目标的真实位置,达到跟踪的目的。
2.3改进算法
该算法采用AVPF算法作为跟踪算法的主体框架,选择跟踪目标确立目标模型,从p(xk,ξki-1| z0:k)中抽样,在粒子集中进行采样获得辅助粒子集,对每个辅助采样粒子进行Meanshift转移,利用采样粒子确定候选目标区域,对候选目标模型与目标模型进行相似性度量,更新粒子权重,将粒子加权确定目标跟踪位置[6]。
3基于Kalman滤波的预测算法设计
在实验过程中,我们假设目标的初始位置由跟踪结果得到,目标做匀速直线运动,目标的初始速度由跟踪实验获得,由跟踪结果获得目标的初始值为xk=(Pxk,P yk,vxk,vxk)T。用Kalman滤波[7~9]对跟踪结果进行预测。
传递矩阵A是一个与x(k)相乘的4×4矩阵,根据Kalman理论[10~11],建立状态方程为

其中:

μ1k和μ2k分别为均值为0,方差为σ12和σ22的高斯白噪声,且它们满足E[μ1kμ2k]=0。
建立观测方程为

其中:zk表示观测向量,zk=[zxk,zyk]T,zxk、zyk为目标的观测位置,观测噪声v1k、v2k是均值为0、方差分别为σx2和σy2的高斯白噪声,vk=[v1k,v2k]T, H为观测矩阵
w(k)和v(k)的协方差矩阵可以计算得到,分别记为Q(k)和R(k),则

当确定了上述参数后,利用Kalman滤波器公式可以完成对目标物体的位置预测。
Kalman滤波的更新方程如下:
观测更新如下:

4算法实现
本文的主要步骤如下:
1)选择跟踪目标;
2)利用基于Meanshift采样的粒子滤波跟踪算法对目标进行实时稳定的跟踪,在视频帧中标示出跟踪结果;
3)记录历史跟踪结果,采用Kalman滤波算法对目标轨迹进行预测,标示出目标的预测位置。预测算法步骤为
(1)按照式(4)和式(9)建立目标的状态方程和量测方程。
(2)递推求解:按照式(10)、式(11)、式(12)计算一步预测;按照式(13)、式(14)、式(15)进行量测更新。
4)利用预测结果反过来修正跟踪结果。
5仿真及结果分析
对一段UAV视频进行跟踪预测的实验,该视频包含UAV侦察目标过程中常遇到的四种情况:目标旋转,机动,部分被遮挡,出遮挡区域。其中AVPF算法的采样粒子数N=200,本文算法的采样粒子数N=10。
图1~3分别给出了Meanshift算法、AVPF算法、本文算法的跟踪结果。图3中绿色框表示目标预测位置,红色框表示目标跟踪位置。由图1~3各组仿真结果中的(a)、(b)图对比可以看到,图像上的红色矩形框都能够准确地锁定跟踪目标,即表明三种算法在发生旋转、机动时均可对目标进行稳定的跟踪,并且图3中的预测框比跟踪框与目标位置的误差更小;图1的(c)图中,目标行驶进入遮挡区域,可以看到在目标部分特征被遮挡时Meanshift跟踪算法出现轻微的目标丢失现象,到图1的(d)显示跟踪框已完全丢失目标;在图2(c)中,从目标进入遮挡区域,部分特征被遮挡,到目标驶出遮挡区域,如图2(d)所示,AVPF算法已丢失跟踪目标;图3的(c)、(d)为本文跟踪算法在目标被遮挡条件下的跟踪情况,(c)图中,此时目标部分特征被背景中的树木遮挡,目标遮挡严重,但是目标的预测位置和跟踪框均与目标的真实位置误差很小,能够有效的跟踪目标,图(d)显示的是目标在行驶出遮挡区域之后的预测结果和跟踪结果,可以看出目标在离开遮挡区域后,跟踪框仍然可以有效地跟踪目标。表明该算法在以上四种情况下均可以稳定有效的跟踪目标,具有良好的鲁棒性。
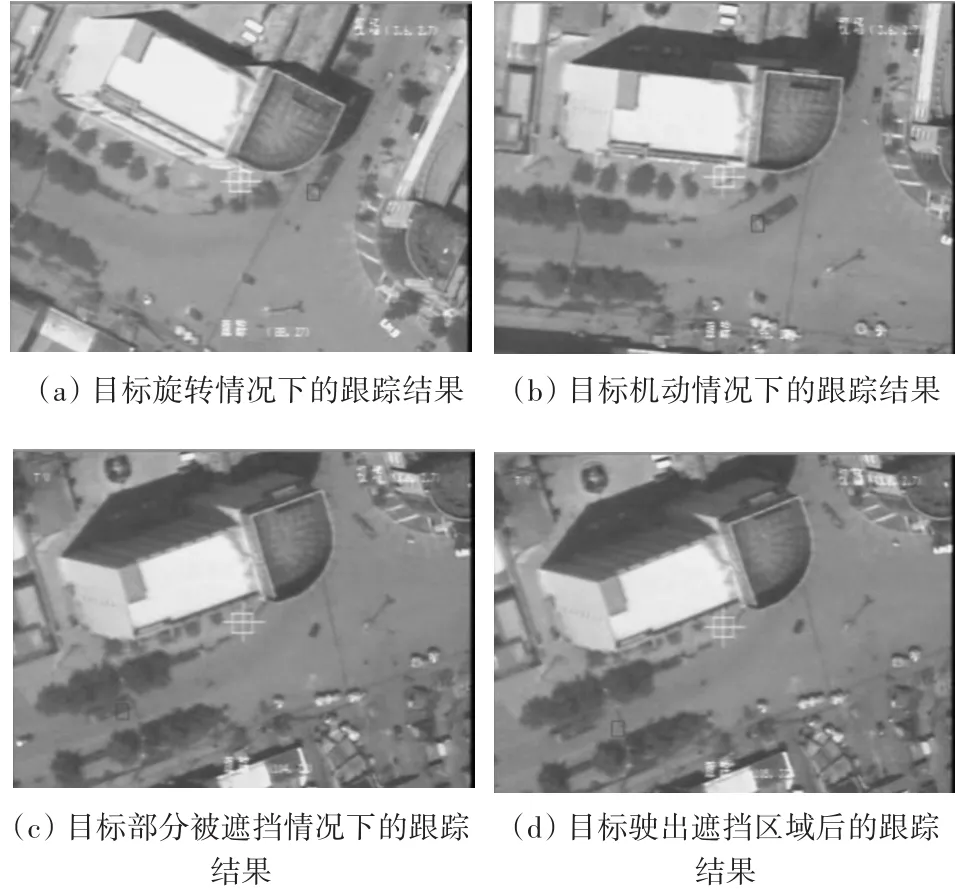
图1 Meanshift算法的跟踪结果
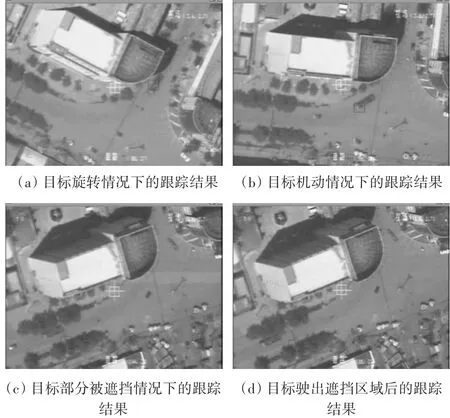
图2 AVPF算法的跟踪结果

图3 本文算法的跟踪结果
在整个视频序列中Meanshift、AVPF算法平均每帧的处理时间分别为10.8059ms、21.1967ms,而加入预测的本文算法仅为13.9756ms,虽然平均每帧的处理时间略高于Meanshift算法,但与AVPF跟踪算法相比,该算法在取较少量粒子的情况下,处理速度有明显的提高,实时性优于AVPF算法满足UAV视频跟踪系统的实时性要求,可以实现UAV运动目标的实时跟踪。
6结语
针对UAV目标跟踪面临的实际问题和具体要求,采用AVPF算法作为本文跟踪算法的主体框架,对每个辅助采样粒子进行Meanshift转移,利用采样粒子确定候选目标区域,对候选目标模型与目标模型进行相似性度量,更新粒子权重,将粒子加权确定目标跟踪位置。再在跟踪算法的基础上,用Kalman滤波来预测目标的轨迹,利用预测结果反过来修正跟踪结果。结果表明该方法具有良好的抗旋转性、抗机动性和抗遮挡性,可以满足目标实时跟踪的要求。但本文的跟踪算法只针对UAV采集视频图像中的单目标,当有其它运动目标进入观测视场时,算法的性能会受到较大的影响,后期可以考虑加入图像分割技术,对多目标跟踪技术进行深入研究。
[1]王俊,周树道,程龙,等.无人机数据链关键技术与发展趋势[J].飞航导弹,2011(3):62-65.
WANG Jun,ZHOU Shudao,CHENG Long,et al.The Key Technology and Development Trend of UAV Data Link[J].Winged Missiles Journal,2011(3):62-65.
[2]汪启伟.图像直方图特征及其应用研究[D].合肥:中国科学技术大学,2014.
WANG Qiwei.Research on Image Histogram Feature Algo⁃rithm and Application[D].Hefei:University of Science and Technology of China,2014.
[3]韩磊,郭晓金,齐威,等.改进的粒子滤波算法[J].电视技术,2012(7):16-19,23.
HAN Lei,GUO Xiaojin,QI Wei,et al.New Improved Par⁃ticle Filter[J].Video Engineering,2012(7):16-19,23.
[4]王长元,金瑞铭,田宝杰,等.一种基于粒子滤波的瞳孔跟踪方法[J].计算机与数字工程,2015(11):2044-2046,2077.
WANG Changyuan,JIN Ruiming,TIAN Baojie,et al.A Method To Track Pupil Through Particle Filter[J].Com⁃puterand DigitalEngineering,2015(11):2044-2046,2077.
[5]Xin Li.Object Tracking Using Meanshift Algorithm Com⁃bined with Kalman Filter on Robotic Fish[C]//Information Engineering Research Institute,USA.Proceedings of 2015 5th International Symposium on Knowledge Acquisition and Modeling(KAM 2015)[C]//Information Engineering Research Institute,USA:2015:5.
辛莉.采用辅助粒子滤波算法和联合卡尔曼滤波器对机器鱼目标跟踪[C]//美国信息工程研究所:2015届国际知识获取与建模会议录,2015:5.
[6]席庆彪,董阳霞,刘慧霞.一种基于M-APF的实时UAV目标跟踪算法[J].系统仿真学报,2014,26(1):107-111,118.
XI Qingbiao,DONG Yangxia,LIU Huixia.Real Time UAV Target Tracking Method Based on M-APF[J].Jour⁃nalof System Simulation,2014,26(1):107-111,118.
[7]孟军英.基于粒子滤波框架目标跟踪优化算法的研究[D].秦皇岛:燕山大学,2014.
MENG Junying.Research on Optimization Algorithm ofTarget Tracking based on Particle Filter[D].Qinhuangd⁃ao:Yanshan University,2014.
[8]朱鹏飞,夏陆岳,潘海天.基于改进Kalman滤波算法的多模型融合建模方法[J].化工学报,2015(4):1388-1394.
ZHU Pengfei,XIA Luyue,PAN Haitian.Multi-model Fu⁃sion Modeling Method Based on Improved Kalman Filter⁃ing Algorithm[J].Journal of Chemical Industry and Engi⁃neering(China),2015(4):1388-1394.
[9]翟卫欣,程承旗.基于Kalman滤波的Camshift运动跟踪算法[J].北京大学学报(自然科学版),2015(5):799-804.
ZHAIWeixin,CHENG Chengqi.A Camshift Motion Track⁃ing Algorithm Based on Kalman filter[J].Journal of Pe⁃ king University(Natural Science),2015(5):799-804.
[10]梁成.基于卡尔曼滤波法视频目标跟踪的改进[J].计算机与数字工程,2014(5):809-811,918.
LIANG Cheng.Improvement of Video Iarget Tracking Based on Kalman Filter Method[J].Computer and Digital Engineering,2014(5):809-811,918.
[11]田晓宇,李明干,刘沛.基于Kalman滤波的神经网络学习算法及其应用[J].计算机与数字工程,2005(2):40-42,104.
TIAN Xiaoyu,LI Minggan,LIU Pei.Neural Network Learning Algorithm Based on Kalman Filter and Applica⁃tion[J].Computer and Digital Engineering,2005(2):40-42,104.
刘冰1,2
(1.达州职业技术学院达州635001)(2.西南大学计算机与信息科学学院重庆400715)
摘要在远程小目标检测中,针对传统小波阈值去噪法及其折衷算法所得到的重构信号出现的附加振荡和处理前后值之间具有的恒定偏差,运用开高次方使改进的函数曲线快速逼近传统阈值曲线的思路,提出了一种改进的小波阈值去噪算法。同时,还给出了运程小目标检测系统的各硬件模块的总体设计,并将改进的小波阈值去噪法运用到该系统的软件设计中。实验表明,该文提出的算法与传统方法相比,能够更加快速准确地分割出远程小目标,提高了检测的精度和准确性,具有一定的实用价值。
关键词小波阈值;小目标;去噪;检测;视频帧
Target Tracking and Forecasting Algorithm for UAV
ZHANG Xin1DENG Wen2
(1.College of Electronic Information and ElectricalEngineering,Shangluo University,Shangluo 726000)(2.College of Autanation,Northwestern Polytechnical University,Xi'an 710072)
To solve the problems of target miss distance,which caused by the time delay during the communication in the UAV and the ground control station,firstly,an auxiliary variable particle filter tracking algorithm based on Meanshift sampling is used to track experiment.Itadopts the AVPF as the main framework ofthe tracking algorithm,then the Meanshiftis applied to cal⁃culate the offset of a few auxiliary particle and move them to the local optimum position of the observed values.Then based on the tracking result,Kalman filter is used to predict the targettrajectory and the results in turn act on correcting the tracking results and solving the miss distance problem.The results show that having the prediction algorithm is closer to the true value and could satisfy the UAV targettrajectory forecasting requirements.
UAV,targettracking,meanshift,AVPF,Kalman filter
TP391.4
10.3969/j.issn.1672-9722.2017.08.014
10.3969/j.issn.1672-9722.2017.08.015
2017年3月3日,
2017年4月13日
国家自然科学基金项目(编号:21273100)资助。
张鑫,女,硕士,助教,研究方向:图像处理。邓雯,女,博士,研究方向:控制理论与控制工程。
