基于GRNN神经网络的ZigBee室内定位算法研究
2017-09-11邓胡滨
邓胡滨,许 峰,周 洁
(华东交通大学信息工程学院,江西 南昌 330013)
基于GRNN神经网络的ZigBee室内定位算法研究
邓胡滨,许 峰,周 洁
(华东交通大学信息工程学院,江西 南昌 330013)
基于固定参数的无线信号传播损耗模型的定位算法,不能很好解决由于多径传播效应和环境复杂性所带来的测距误差问题。提出使用GRNN神经网络来拟合室内RSSI值与距离值之间的映射关系,得到RSSI值与距离值的映射模型,再将定位实验中实测的RSSI值作为训练好的GRNN神经网络的输入层,在输出层得到与RSSI值相对应的距离值,最后使用加权质心算法来进行待测节点的定位。该算法不仅简单而且性能良好,并且不需要额外的硬件。经过Matlab和ZigBee实验仿真验证,与路径损耗模型和基于BP神经网络的定位算法相比,所提出的算法可以提供较好的定位结果。
室内定位;广义回归神经网络;信号接收强度;加权质心;无线传感器网络
随着无线传感器网络技术(WSN)[1]在大型建筑物如仓库、矿井、商场等室内环境下的快速发展应用,基于无线传感器网络的定位算法也越来越受到国内外科研人员的关注。现阶段国内外研究室内定位的算法主要根据所使用的数据类型分为两大类:测距和非测距。一般来讲基于测距的定位算法所得到的定位计算结果精度要比基于非测距的定位算法高。基于非测距的定位算法在进行定位计算时不需要参考节点与待测节点之间的距离信息来进行定位,它主要是利用从附近的几个参考节点的其它信息如节点的连通性来进行定位计算,如Dv-Hop定位算法[2]采用节点之间的距离矢量信息和网络连通性来计算待测节点的坐标位置。基于测距的定位算法需要参考节点与待测节点之间的距离信息或角度信息,再利用三边测量或质心等定位算法来进行定位计算。RSSI(信号接收强度),AOA(到达角度),TOA(到达时间)和TDOA(到达时间差)是用来计算距离或角度信息的四个重要技术[3]。在研究定位算法中,基于RSSI的定位算法利用已有的无线传感器网络基础硬件设施就可以用来进行节点的定位操作,不需要增加专门的硬件设备。所以与其他技术相比,RSSI技术在设备复杂性和从成本角度来说是有很大优势的。
在完成6点部位的连弧焊操作后,到达5点和7点位置,为了减少熔池过渡坠瘤,改为断弧焊工艺。由于镍基材料熔池流动性差、冷却速度快等特点,因此断弧打底时的频率要快,再起弧的位置要准,通常在上一熔池冷却到二分之一时,进行下一弧的引燃,并在熔池温度最高的地方再起弧(即熔池最亮的地方)。打底时熔池易往焊缝中间聚集、两侧易夹沟,因此焊条要做左右摆动,使熔池能够到达焊缝坡口的两侧,分散熔池中间的温度,确保背面焊缝两侧熔合良好。
基于RSSI值的定位算法在进行定位计算的过程中,一般是使用固定参数的无线信号传播损耗模型[4]来计算得到所需的距离值信息,与此同时在实际定位中可以利用卡尔曼滤波[5]、加权质心[6]等一系列的优化算法来优化定位计算的结果。但是室内环境下的无线信号由于在非视距环境下进行传播,传播过程中受到多径传播效应及其它信号的干扰,传感器在同一坐标点上所收集到的RSSI值有较大浮动,选取合适的信号传播损耗模型参数是比较困难[7],且在定位计算时采用固定参数的损耗模型将会导致室内定位算法的定位计算结果误差较大。
在研究定位算法的过程中为了解决这个问题,国内外有研究学者发现人工神经网络(ANN)可以运用在定位计算中,利用人工神经网络模型来改善定位算法。如文献[8]提出利用BP神经网络的来实现定位;文献[9]提出利用径向基神经网络(RBF)结合RSSI值来实现定位;文献[10]提出利用BP神经网络和泰勒级数相结合来实现定位计算;文献[11]提出非视距环境下利用BP神经网络得到模型的动态环境参数。
企业人力资源管理与企业文化相辅相成,如果我们把企业人力资源管理比做一棵树苗,那么企业文化则是这棵树苗生存的环境。我们从通用电气的发展轨迹中不难看出,企业文化对企业发展具有根本性的作用。因此,建设企业文化就显得非常重要。
钻井液方面标准化建设工作走上了稳步发展之路,近几年来,一大批钻井液方面的行业标准制订并颁布执行,对钻井工程专业产生了积极而深远的影响。通过宣传、贯彻、执行标准,规范了钻井液技术行为,推动了我国钻井液处理剂市场的健康发展以及钻井整体技术工艺水平的提高。
本文提出利用GRNN(广义回归)神经网络模型来拟合室内RSSI值与距离值之间的映射模型,利用映射模型把将RSSI值映射为节点距离信息。利用GRNN神经网络可以使得定位算法在由RSSI值转换为距离信息时不再受限于路径损耗模型选取固定环境参数的问题。带有噪声值的RSSI测量值可以直接和实际坐标位置一起用来训练网络。在实际定位计算实验中利用ZigBee硬件平台所采集到的无线传感器的RSSI值作为训练好的神经网络模型输入层,在神经网络的输出层得到计算所需的距离信息,最后使用加权质心定位算法计算得到待测节点的坐标位置。实验结果表明与路径损耗模型和基于BP神经网络的定位算法相比,所提出的算法可以提供较好的定位结果。
1 定位算法原理
1.1 路径损耗模型
室内环境下的无线传感器网络在传播信号的过程中,可以利用路径损耗模型将传感器收到信息中的RSSI值转化为节点之间的距离信息。考虑到无线传感器网络的信号在室内传播过程中受到信号反射、衍射干扰和室内环境存在障碍物的情况下,路径损耗模型一般采用Shadowing模型[7]

加权质心定位算法[15]的基本思想是利用加权因子来反应参考节点在质心定位计算时对计算结果的影响程度,公式为

使用第2组实验所采集到的RSSI值数据作为已经训练好的GRNN神经网络模型的输入量,在训练好的GRNN神经网络的输出层得到待测节点到参考节点的距离值。
1.2 GRNN神经网络
ANN(人工神经网络)由称为神经元的多个非线性变换单元和称为互连权重的自由参数构成,可以通过改变神经元的激活函数和它们之间的加权互连的结构来创建各种类型的网络,例如BP神经网络、RBF神经网络等等。人工神经网络可以解决大量的非线性或线性函数拟合或模式匹配问题[12]。
从上一步中获得到RSSI值后,将第1组收集到的RSSI值作为GRNN神经网络的输入,从参考节点与待测节点之间的已知距离创建输出数据集。使用Matlab软件自带的神经网络工具箱中的创建函数net=newgrnn(P,T,spread)创建GRNN神经网络,其中P为输入向量,T为期望输出。这里只需确定传播常数spread。在广义回归神经网络的训练过程中传播常数是重要的参数,因为它确定RSSI值与距离值的映射函数的拟合度。为了不失一般性,利用交叉验证的方式取得spread的最优选择,最后利用数据和最优的spread得到训练好神经网络,这里取得spread为0.8。
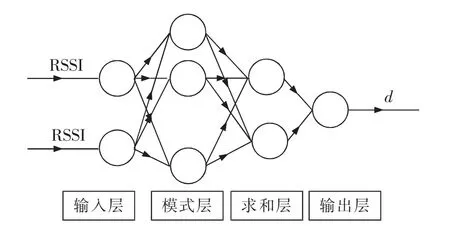
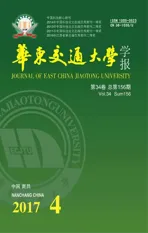
图1 GRNN神经网络的架构Fig.1 GRNN neural network architecture
实验使用的RSSI数据采集是在室内7 m×7 m的区域内所采集到,利用美国德州仪器公司的ZigBee芯片CC2530搭建一个小型的室内定位系统,系统由3部分组成:一个网关模块用于接收参考节点发送过来的信息,并通过串口将接收到的信息发送到上位机,上位机收到数据后保存作为提供给后续实验所使用的仿真数据;四个参考节点用于接收待测节点发送的信息,并与网关节点通信;一个待测节点模块用于周期性地向周围发送信息。所使用的ZigBee芯片都设置相同硬件参数,仅芯片的所烧录的程序不同,减少因硬件不同所带来的误差。网关模块从接收到的信息提取出来的RSSI值用作GRNN神经网络的训练数据。整个实验数据采集需要采集两组数据集,一组用来训练神经网络,另一组用来检验训练后的神经网络模型。
GRNN神经网络的权值参数由训练样本所决定,网络的训练过程依赖样本从而避免了人为的主观假定,同时GRNN神经网络的收敛速度比BP神经网络快[14]。
1.3 加权质心算法
传统的质心定位算法是根据
通过合作研究[15],基于投影图像对小直径铣削刀具状态开展了在线监测研究,其原理如图13所示。在激光传感器感知刀具转角位置信号后,通过PLC给CCD相机发出指令,相机随即开始拍照,获得刀具的投影图像。

其中:A(xa,ya),B(xb,yb),C(xc,yc)是三个参考节点以与待测节点之间的距离为半径的三个圆的交点,如图 2所示,这三个坐标点所围成的区域即是待测节点所可能出现的区域,由公式(3)计算出待测节点的坐标值 D(x,y)。
式中:d表示的是发射节点和接收节点之间的距离值,m;d0表示的是参考距离值,m;Pr(d0)是以dB为单位的参考距离d0中的信号强度,dBm。X是高斯分布变量,其平均值为0,标准差为4~10,dbm;n称为与环境相关的信号传播常数。在实际的实验研究中常取d0=1 m,同时经过多次测量确定Pr(d0)的值,然后将上述公式改为
第2组实验数据将4个参考节点放置如图3的位置进行采集,待测节点随机放置于平面上进行采样,采集 7 组数据作为实验验证数据,每组数据有 4×20 个值,数据以{RSSI[r1,r2,r3,r4],(x,y)}的形式保存,表示待测节点在坐标为(x,y)时4个参考节点所采集到的RSSI值,对数据进行预处理,取每次采集到RSSI的平均值。
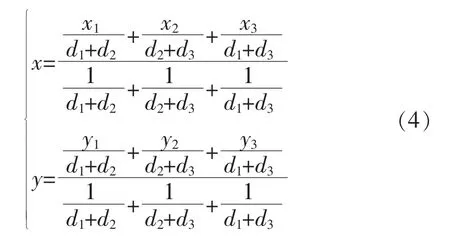

图2 加权质心算法Fig.2 Weighted centroid algorithm
式中:d1,d2,d3分别是3个参考节点与待测节点之间的估计距离值。
2 实验验证
2.1 实验样本数据获取
图1中输入层为RSSI值,模式层的神经元个数与训练的样本数相等,输出层为距离值。
第1组实验数据采集是将4个参考节点固定放在同一处用于接收来自参考节点的发送的信息,待测节点每隔0.25 m移动来进行采样,总共移动9 m得到36组采样数据作为训练数据集,每组数据有4×20个值,数据以{RSSI[r1,r2,r3,r4]}的形式保存,表示4个参考节点与待测节点相距d m时所采集到RSSI值,之后对数据进行初步处理,取每次采集数据的平均值。
1.晕动病的处理措施:乘车前不要给宝宝喂食油炸或高脂肪的食物;一般情况下宝宝上车容易睡觉,晕车的几率相对较小,尽量不要给宝宝吃晕车药,可以准备一些橘子、橙子,这些水果可以有效预防晕车;保持车内空气畅通,不要待在有浓烈食物味道或汽油味的地方,远离吸烟者;可以坐在司机旁边的座位上,以减少颠簸。
2.2 神经网络的训练
本文所采用的是人工神经网络是:广义回归神经网络[13]。GRNN(广义回归)神经网络是RBF(径向基)神经网络的一种变体,是一种基于非线性回归理论的前馈式神经网络模型。GRNN神经网络构造如图1所示。
原油作为重要大宗商品,其下游产品和价格波动与人们的生活息息相关。2018年3月26日,中国原油期货上市,国内投资者可以通过原油期货来参与国际原油定价,并对冲油价上涨和通胀的影响。原油价格受到供需、政治、经济、地缘等多因素影响,一方面,对边际供给或需求缺口基本面的预期是推动油价变化的主要因素,另一方面,经济增长、货币政策、汇率波动等宏观因素也会影响油价,金融危机的扩散往往伴随着油价下跌。因此,可以将这些因素大致归类于原油的商品属性和金融属性。
2.3 定位计算
式中:RSSI表示为接收节点所接收到的信号强度值,dBm;A表示为接收节点在距离发射节点1 m处接收到的信号强度值。利用公式(2)可以将RSSI值转化为发射节点与接收节点之间的距离值。公式的转化结果主要取决于A和n的值,一般在使用中设置为固定值,但是在实际使用过程中因为在室内环境中由于室内环境的复杂性,信号传播常数n会发生波动。波动可能是由环境的变化或者人物的运动和吸收所导致的。n的波动将会影响到距离值的转换结果,给定位算法带来直接的误差影响。同时随着距离的增加,根据上述公式的距离计算会变得更加困难。
将上一步中得到距离值,每组取出距离值最小的3个参考节点,再利用加权质心算法进行定位计算得到待测节点的估计坐标。最后利用式(5)来计算定位误差E

其中:(x,y)是待测节点的实际的坐标,(xi,yi)是待测节点估计坐标。
待测节点个数为n,利用式(6)来计算平均定位误差Em

整个定位算法实验的流程图如图4所示。

图3 4个参考节点放置在7 m×7 m的区域内Fig.3 The four reference nodes placed in the 7 m×7 m area
图4 定位算法流程图Fig.4 Localization algorithm flow chart
3 定位算法结果
分别使用了基于GRNN,基于BP和基于路径损耗模型的定位算法来进行定位算法结果比较,这三种算法都使用了相同的室内环境下收集到的数据集来进行仿真计算,仿真的结果如表1所示。
根据实验仿真的结果和结果误差显示,利用GRNN神经网络的定位算法的定位计算结果要优于利用BP神经网络和基于固定路径损耗模型的定位结果,其中基于GRNN神经网络的定位结果最小误差为0.44 m,最大误差为1.56 m;在定位平均误差方面,根据计算分别比BP神经网络和路径损耗模型提高约0.8 m和1.4 m,表明在相同的室内环境下基于GRNN神经网络的定位算法可以提供较好的定位结果。
本文进行夜间灯光处理使用的数据主要来源于4个部分:第一部分为DMSP/OLS夜间灯光数据。来自NGDC(隶属美国国家海洋和大气管理局)公开发布的第四版全球DMSP-OLS夜间灯光产品(V4DNLTS),均可在NGDC的官方网站下载。第二部分数据为辐射定标灯光图像,该图像用于饱和及内部校准的参考灯光,来自NGDC另外发布的辐射定标灯光图像系列。第三部分数据为石油/天然气燃烧矢量图层,同样来自NGDC公开的全球数据库。第四部分为国家及其行政区域地图,来自DIVA-GIS项目网站(http://www.diva-gis.org/Data)。
最后,在施工过程中,协调其他部门进行团队合作,使各个部门明确自己的工作任务和承担的责任,确保各项管理制度顺利落实。

表1 定位结果Tab.1 Localization results m
定位结果误差图如图5所示。
4 结束语
提出一种基于GRNN神经网络的无线传感器网络室内定位算法。首先使用TI公司的CC2530芯片搭建硬件实验平台,采集后续实验仿真所需的数据;再利用GRNN神经网络建立RSSI值与距离值之间的映射模型,避免使用路径传播损耗模型的因为参数n的波动给定位算法带来的误差影响。在实验过程中先利用RSSI值对GRNN神经网络模型进行训练,得出室内区域环境下RSSI值与距离的映射模型,在定位计算中利用训练好的神经网络模型得到所需的距离值,最后根据加权质心定位算法计算出待测节点的坐标值,实验仿真的结果表明算法可以实现较好的定位结果。
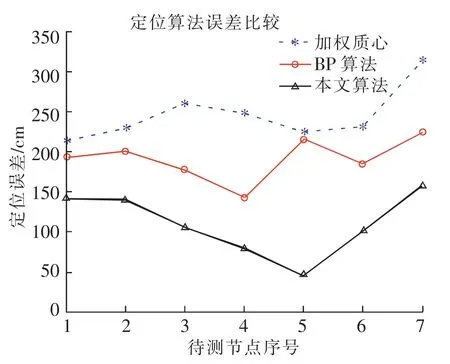
图5 结果误差图Fig.5 Results error chart
[1]钱志鸿,王义君.面向物联网的无线传感器网络综述[J].电子与信息学报,2013,35(1):215-227.
[2]章磊,黄光明.基于RSSI的无线传感器网络节点定位算法[J].计算机工程与设计,2010,31(2):291-294.
[3]MAUTZ R.Indoor Positioning Technologies[M].ETH Zurich:Institute of Geodesy and Photogrammetry,2012:57-90.
[4]赵基玮.基于ZigBee技术的无线传感器网络定位系统的设计与研究[D].南宁:广西大学,2011.
[5]顾宗海.基于RSSI测距的室内定位算法研究[D].郑州:郑州大学,2011.
[6]韩东升,杨维,刘洋,张玉.煤矿井下基于RSSI的加权质心定位算法[J].煤炭学报,2013,38(3):522-528.
[7]李瑶怡,赫晓星,刘守印.基于路径损耗模型参数实时估计的无线定位方法[J].传感技术学报,2010,23(9):1328-1333.
[8]李瑛.基于BP神经网络的室内定位技术研究[D].长沙:中南大学,2007.
[9]TIAN J,XU Z.RSSI localization algorithm based on RBF neural network[C]//Beijing:IEEE,International Conference on Software Engineering and Service Science.IEEE,2012:321-324.
[10]张会清,石晓伟,邓贵华,等.基于BP神经网络和泰勒级数的室内定位算法研究[J].电子学报,2012,40(9):1876-1879.
[11]彭宇倩,曾碧,肖红,等.基于BP神经网络的实时动态参数定位方法[J].计算机工程与设计,2014(10):3679-3684.
[12]马锐.人工神经网络原理[M].北京:机械工业出版社,2014:134-167.
[13]徐富强,郑婷婷,方葆青.基于广义回归神经网络(GRNN)的函数逼近[J].巢湖学院学报,2010,12(6):11-16.
[14]崔东文.几种神经网络模型在湖库富营养化程度评价中的应用[J].水资源保护,2012,28(6):12-18.
[15]郜丽鹏,朱梅冬,杨丹,等.基于ZigBee的加权质心定位算法的仿真与实现[J].传感技术学报,2010,23(1):149-152.
Study on Indoor Location Algorithm of ZigBee Based on GRNN Neural Network
Deng Hubin,Xu Feng,Zhou Jie
(School of Information Engineering,East China Jiaotong University,Nanchang 330013,China)
In response to the problem that the localization algorithm based on the wireless signal propagation loss model with fixed parameters can’t remove ranging errors induced by multipath propagation effects and environmental complexity.This study adopted GRNN neural network to fit the RSSI value and distance value,and then get the mapping model of RSSI value and distance value.It adopted the RSSI value as the input layer of the trained GRNN neural network and derived the RSSI value in the output layer.Finally,the weighted centroid algorithm was applied to locate the node.It finds that the algorithm is simple and well-behaved,and does not require additional hardware.Through the simulation and experiment results on the MATLAB and ZigBee,compared with the localization algorithm based on the path loss model and BP neural network,the proposed algorithm can provide better localization results.
indoor location;GRNN neural networks;
signal strength indication;weighted centroid;WSN
TP393
A
(责任编辑 姜红贵)
1005-0523(2017)04-0137-06
2017-04-10
江西省自然科学基金项目(20142BAB217019);华东交通大学校立科研课题(12XX06)
邓胡滨(1961—),女,副教授,主要研究方向为物联网,无线传感器网络。