基于北斗的低成本无人机倾斜摄影系统的设计与实现
2017-09-11徐申远张云洪中华杨树瑚韩彦岭
徐申远,张云,洪中华,杨树瑚,韩彦岭
(上海海洋大学 信息学院,上海 200136)
基于北斗的低成本无人机倾斜摄影系统的设计与实现
徐申远,张云,洪中华,杨树瑚,韩彦岭
(上海海洋大学 信息学院,上海 200136)
微小型的低成本无人机具有起降场地限制小、运输方便、及成本相对低廉的特点,在小范围及分散的区域摄影测量工作中得到广泛应用,但低成本无人机在定位精度、续航航程、成像载荷选择等诸多方面需要进行取舍与妥协。因此需要提升低成本无人机的拍摄作业效率,构建一种低成本固定翼无人机,利用北斗/GPS组合定位增加高仰角卫星数,减少姿态角变化导致的定位精度下降;采用两个运动摄像头同步拍摄作为成像载荷;整套系统成本控制在一万以内。根据试验航程时间及试验后电池剩余电量的估算,机体作业飞行时间约1小时30 min,作业航程约70 km.
低成本无人机;北斗定位;航拍;倾斜摄影
0 引 言
微小型无人机由于其灵活、成本低廉等优势在各行各业得到广泛应用[1],如国土资源规划[2],松木病害监测[3],灾情评估等方面[4-6]。
无人机摄影测量随着低成本的微小型无人机的逐渐普及,以及相关软件的成熟逐渐兴起,其中一个主要需求就是倾斜摄影三维重建[7]。倾斜摄影通过利用相机获取的建筑物/地物的顶面、四个侧面的纹理信息,进行特征匹配并建模,最终获得地物的三维建模[8-9],但载人飞行器携带传统的倾斜摄影设备虽然精度较高[10],但成本高昂,应急能力较差,而且受天气影响较大[11]。无人机倾斜摄影的优势在于体积小、重量轻以及相比有人机作业成本低廉,但是也存在诸多劣势:多旋翼无人机虽然能够垂直起降,但能量利用效率低,继而续航时间与航程都有限[12];直升机能量利用效率有提升,但机械结构复杂采购及维护成本较高[13];固定翼无人机可以在运载能力与航程上获得优势,但需要起降条件[14],并且在切换航线过程中需要进行剧烈动作,导致GPS天线倾斜,影响定位精度[15]。
本文设计并实现了低成本的无人机硬件、软件系统;通过部分改造航模的泡沫机身并进行结构补强,达到运载相机以及飞控系统的运载能力以及续航要求;利用ArduPilot开源飞控及配套的开源地面站,较好的解决了航线优化配置问题;并利用北斗/GPS组合定位,获取更可靠的定位星座,确保较大姿态角时的定位精度。
1 低成本无人机设计与实现
1.1 低成本无人机系统框架
本文整体技术框架如图1所示,主要包含硬件控制模块、通信模块和软件模块三个部分。硬件模块包括相机快门控制、飞行控制、油门控制和舵面控制。通信模块采用无线自组网XBee模块,通过无线通讯,地面终端实时获取当前无人机的位置坐标与姿态、速度、航向等等数据,亦可通过上行链路设置、更改航测路径点。通过选用兼容北斗的接收机模块,并修改配置,同时接受北斗及GPS的卫星数据并解算,得出在中国地区更好的定位效果。
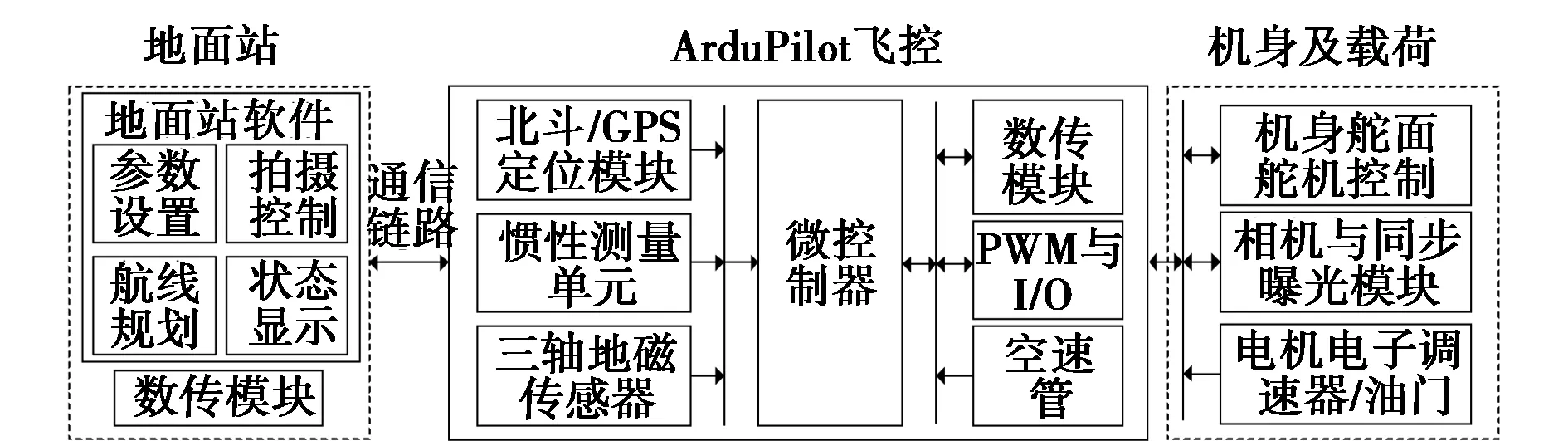
图1 系统总体框图
1.2 飞行控制系统设计
飞行控制系统采用了开源飞控项目ArduPilot,主体硬件为Pixhawk飞控,安装了兼容北斗定位系统的GPS接收机,空速计、外置电子罗盘以及电池传感器;同时输出给无人机上的执行器飞控解算出飞机的当前位姿,并控制无人机沿预设路径点执行自动任务,如图2所示。
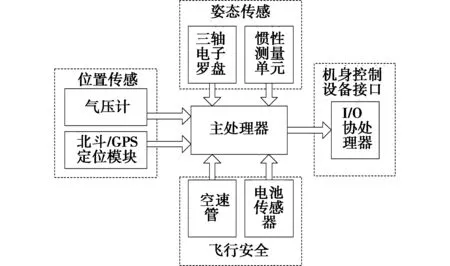
图2 飞行控制系统核心框图
本系统采用了Ublox-M8N接收机模块,利用单频北斗/GPS组合定位[16-17],获取当前的坐标,为无人机提供导航信息,由于能够同时获取北斗与GPS的定位服务,高仰角可视卫星数提升,图3为上海海洋大学信息学院楼顶天线的天顶图(UTC2017/03/23 07:44:24),最外环为0°仰角,内环为45°仰角,可以看到GPS卫星在高仰角区域卫星数较少,当机身在做较大幅度的转弯导致机身倾斜时,由于低仰角位置的卫星信噪比降低(廉价的微带天线在垂直方向上的增益最大,而0°方向上增益为0),从而导致的定位精度降低;通过加入北斗卫星星座进行组合定位,确保高仰角区域卫星数目,使得在天线倾斜时产生的定位精度下降得到一定程度的抑制;尽管如此由于本系统目前为单点定位,结果误差较大,从图4可看出,图中为两小时的定位结果误差,每一环较内环半径增加1 m,圆心为天线实际坐标,15 min的定位误差大于1 m,因此该定位结果仅用于对位置进行粗略估计。
虽然最后单点定位误差较大,但北斗/GPS定位模块的解算结果的变化量与实际的位移量相关,可以得出当前地速,地速与空速比对后对于判断当前高度的风向起到一定作用,有助于规划航测路径,减少由于大气扰动导致的无人机摆动影响摄影测量成像质量。同时地速在一定程度上校正了空速值,实现冗余备份,降低了由空速管堵塞导致失速坠机的风险。因此通过北斗/GPS组合定位获取更多高仰角可视卫星,提高转弯过程中得到更稳定的定位解,可以获得更高的稳定度与安全性。
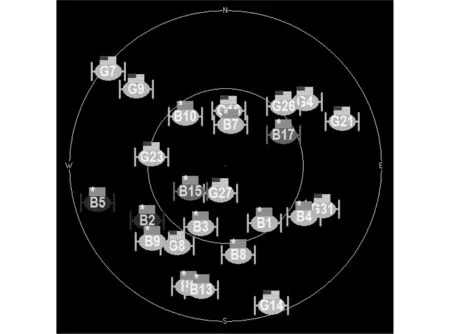
图3 上海海洋大学的信息学院楼天顶图(UTC2017/03/23 07:44:24)
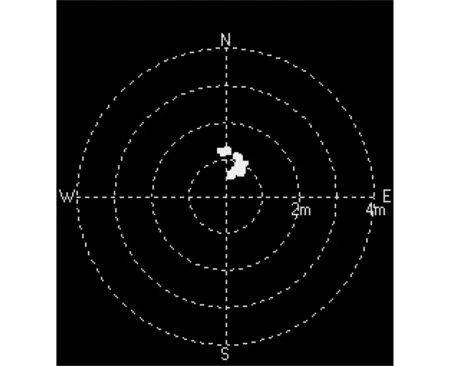
图4 定位误差图(UTC2017/03/2307:29:40-07:44:24)
1.3 飞控软件结构
本套无人机系统的软件部分分为飞控软件(机载)与地面站软件,两者间通过串口透传实现数据通信,如图5所示。
飞控软件运行于飞控处理器上,采集传感器信息并控制无人机,同时利用无线数传模块与地面站通讯,获取新的路径点任务及发回当前飞行状态数据。飞控软件包含姿态解算、导航、控制、对地数据通信四个部分。
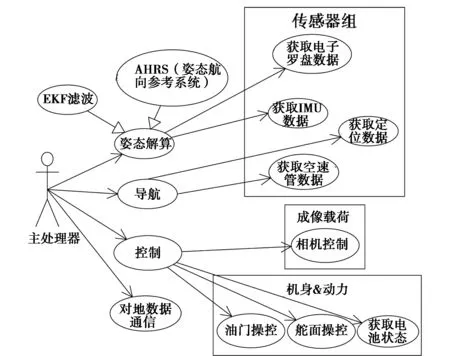
图5 无人机软件组件图
姿态解算部分通过传感器数据计算出姿态估计,以此为参考实现机身姿态控制,由于采用了廉价微机电传感器构成(MEMS)的惯性测量单元(IMU),其传感器精度较差[18],只使用惯性传感信息的话姿态解算结果误差随时间增长而增长,因此姿态解算方法采用航姿航向参考系统(AHRS),与专业无人机不同,不仅获取IMU的惯性传感信息,同时加入电子罗盘的三轴磁场方向信息,以此来确保在运动状态下获得较为可靠的机身姿态,但也由此导致了航姿航向系统依赖周围磁场,磁场与重力场成正交则航姿测量效果较好;如果趋于平行,如在高纬度地区,航线角就误差就会增大,越靠近地磁极误差越大,最后无法测出[19-20]。因此安装飞控过程中需要考虑机身内部电路和设备磁场对飞控的影响。
导航部分管理无人机的高度、航向与速度。通过解析北斗/GPS定位模块给出的定位与导航结果,获得大地坐标系下的位置、高度、地速;接收机高度与加速度及气压计融合,获得更精确的机体高度估计;地速与空速计结果融合,估算出空速管的误差,在一定程度上进行修正;定位坐标与经过融合的高度,与当前目标航点进行比对,给出飞机下一个控制周期的航向[21]。航迹导航算法默认配置为垂直航向(Cross-track)与比例-积分-微分控制器(PID),经过配置,可以使能L1自适应算法[22],以获得更好的航线控制精度,但需要在基本参数调整结束后开启,并继续手动调整L1相关参数来使整体效果达到可用状态。
控制部分负责机身各单元的实际控制,如:机身主翼上的副翼、水平尾翼上的升降舵、垂直尾翼上的方向舵、无刷电机电子调速器等;并且管理各个功能单元的状态,如是否使导航模块进入起飞模式或自动模式,并获取其他功能单元更新的数据,如:姿态、航向角及速度结果,以此决定对机身的操作舵面以及油门动力控制,并在极限状态下纠正操作、确保飞行安全,如:在速度过低时,根据配置参数比率采取压低机头及提升油门的策略来维持速度,避免失速;在电池传感器测量后报警电量过低时,强行将自动模式切换为返航模式。
控制部分在开机后即开始对各个受控组件发送零信号,阻止机体执行机构执行任何动作,确保地面的人员及设备安全,之后进行状态检查,在所有功能如姿态解算、导航等程序及相关传感器的检查标识位进入正常值后解除安全锁定,进入普通状态;飞控系统的状态管理也直接反映在控制部分上,在自动驾驶模式时,控制系统接管整个无人机的控制,地面站无法操作舵面及油门,飞控系统根据导航程序当前指向的路径点执行作业,并在航点列表执行完毕或电池传感器电量过低时自动切回返航模式,在辅助驾驶模式时,根据设置,地面站能够获取限定条件下的机身操作,如限定的俯仰与侧倾角度,限定的最大升降速度以及预设的最低平飞速度以上的油门控制;飞控系统软件在默认配置下采用PID控制机身姿态;成像载荷控制在作业过程中每次传感器数据融合后查询导航部分反馈的位置及姿态信息,在达到成像要求位置与姿态情况下驱动成像载荷的相机的开关机与快门控制,并对拍摄位置、高度及AHRS参数记录;通过脉冲宽度调制(PWM)、控制局域网(CAN)等信号/总线实现对各个设备通信控制,监测飞行电量在电压过低时进入返航状态。
对地数据通信采用开源的MAVLink协议实现数据包校验以及各种标准功能通讯:反馈飞行器当前飞行状态、参数调整、路径航点列表更新及飞行状态变更。MAVLink兼容不同的数据传输介质,如串口及网络套接字等,在本套系统中我们采用无线串口模块实现,MAVLink数据包校验方式为CRC16,在数据包末尾两个字节存放校验信息。
1.4 地面站软件
地面站软件部分主要功能为三大块,分别是飞行状态显示、航线规划及飞控参数调整,如图6所示。
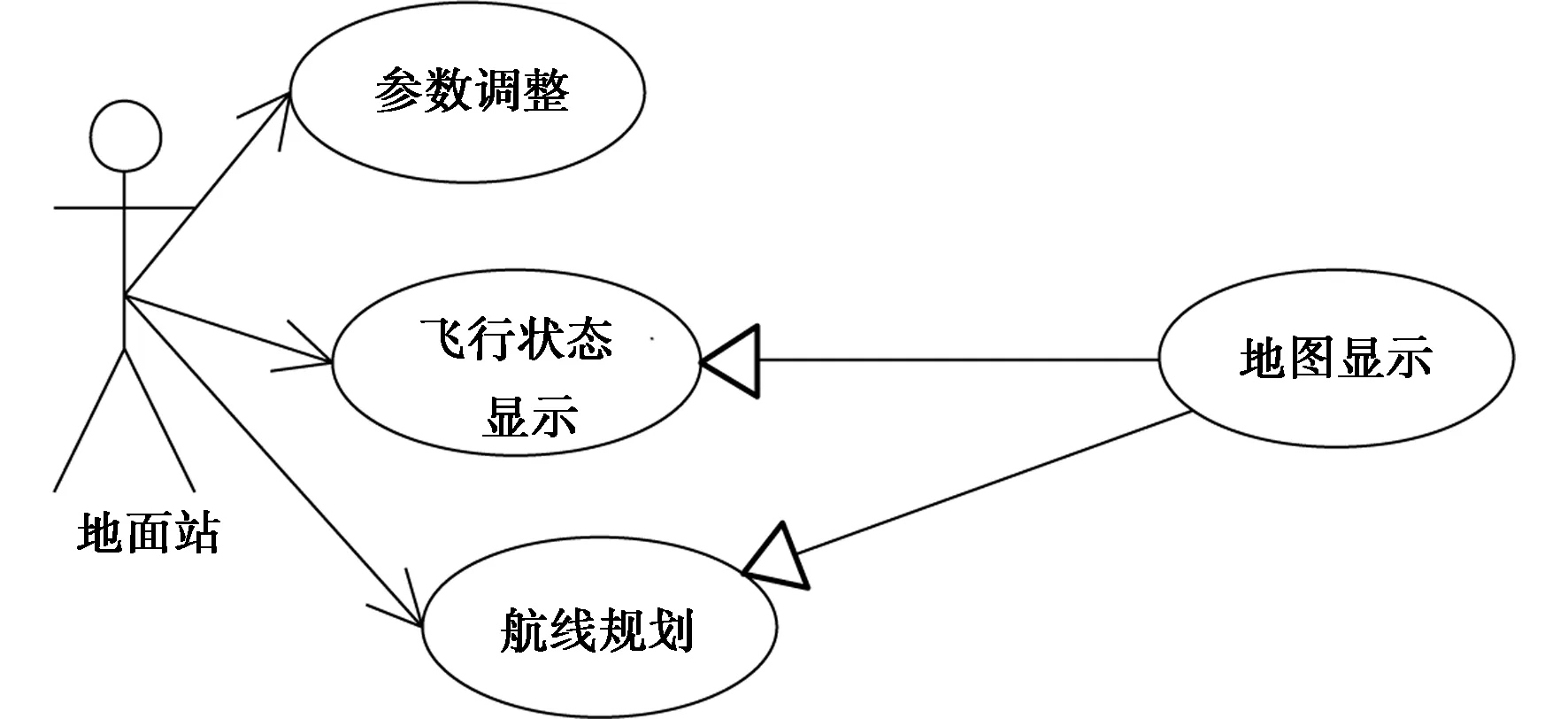
图6 地面站软件组件图
飞行状态显示包含了当前无人机的姿态球,一个可配置显示六个可选参数的面板,一个可选服务商的在线地图,地图上可以映射飞行航迹以及飞控中预路径点轨迹;航线规划可以设置作业区并自动生成路径点轨迹,并根据飞行高度与相机视场角、相机像素和目标地物分辨率等参数设定航线间隔及拍照密度;飞控参数调整涵盖了飞控的所有参数,包括各种传感器的功能使能及外设相关参数设置,其中GPS相关设置可以预设安装的GPS协议类型、使用的卫星系统以及波特率等参数,并在初始化过程中对GPS模块进行配置,本系统目前采用的是u-blox LEA-M8P定位模块,可以同时接收北斗/GPS卫星信号,并且可以通过外部输入u-blox、RTCM等格式的基准站测量数据并进行差分定位,另外通过配置为存储原始数据,可以使飞控保存接收机输出的原始观测数据到存储卡中,进行后处理定位,获得更精确的后处理航迹。
2 实验场景及准备
正式的航测实验总共执行两次,实验场地位分航测区与测试/起降区,第一次实验的航测区为学校某幢楼为中心,在其周围长8 000 m宽900 m的区域,如图7所示,设计航程为61 km(长于预计航程极限,用于测试最大航程);第二次航测区为学校附近的人工湖岸边以及附近的海岸,设计航程38 km,如图8所示;测试/起降区为学校外的一片草地,整个草地尺寸为一个三边为400 m、600 m、700 m的三角形,实验开始前在该处起飞,完成状态检查后进入自动航线模式进行实验。表1示出了两次实验的天气情况。

图7 第一次实验航迹

图8 第二次实验航迹
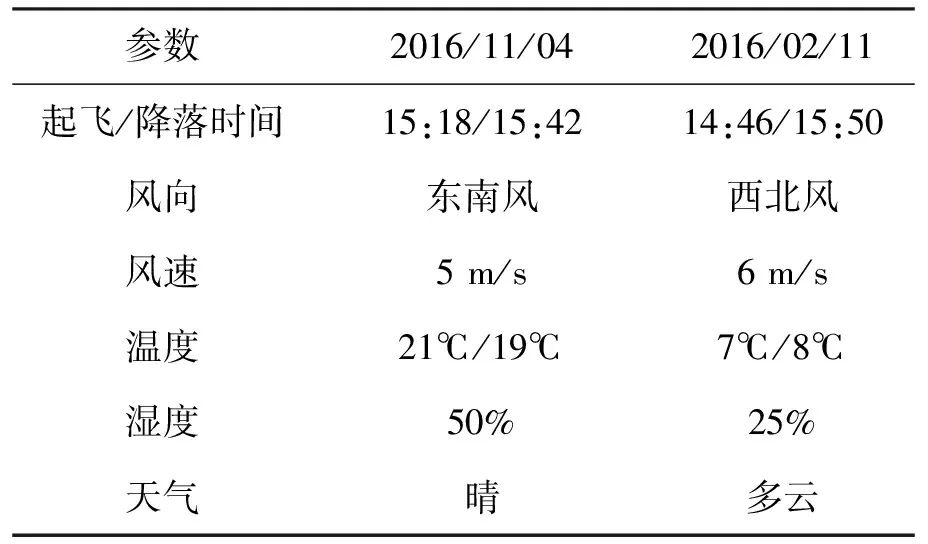
表1 实验天气参数
第一次实验:由于在实验前仅进行了草地上空的简单自动航线飞行,本次实验是第一次测试长距离航测,因此自动航线先在草地绕一圈用于检查状态,之后以15 m/s速度穿过航测区域测试通信状况,接下来绕航测区域某幢楼进行绕圈飞行。之后返回起始点上空,切换到25 m/s速度,并开始航测路线与拍摄,由于拍摄航线密度较高,选用前后两个往返航线间隔四个航线的规划策略,因为如果一条航线完成后迅速切入相邻的往返航线(平行,方向转向180°),会出现飞机不在预定航线上,由于无法对准航线还处于转弯或修正航向状态,导致航测成像受到影响,航线规划时需要较大的回转空间,增加了额外的回转距离,造成额外动力消耗,减少了航程。
第二次实验:航线设置为从起飞点飞往人工湖沿岸飞行一圈并拍摄,再前往附近海岸进行海岸拍摄,机身设置参考第一次实验及后续测试数据分析后进行调整,调整机身重心与并且调整飞控的姿态控制以及巡航速度等参数,增加稳定性,并提升飞行效率。
3 实验结果分析
主要分析航迹与预设航线重合度精度、机身姿态稳定情况以及航程。
第一次实验在自动航线上的飞行距离为21.5 km,在原本的预设航线61.2 km完成前电压低于预设保护值触发了返航,测量落地后的剩余电量约为55%[23],以此推算最大航程约45 km.

图9 第一次实验截取分析航线
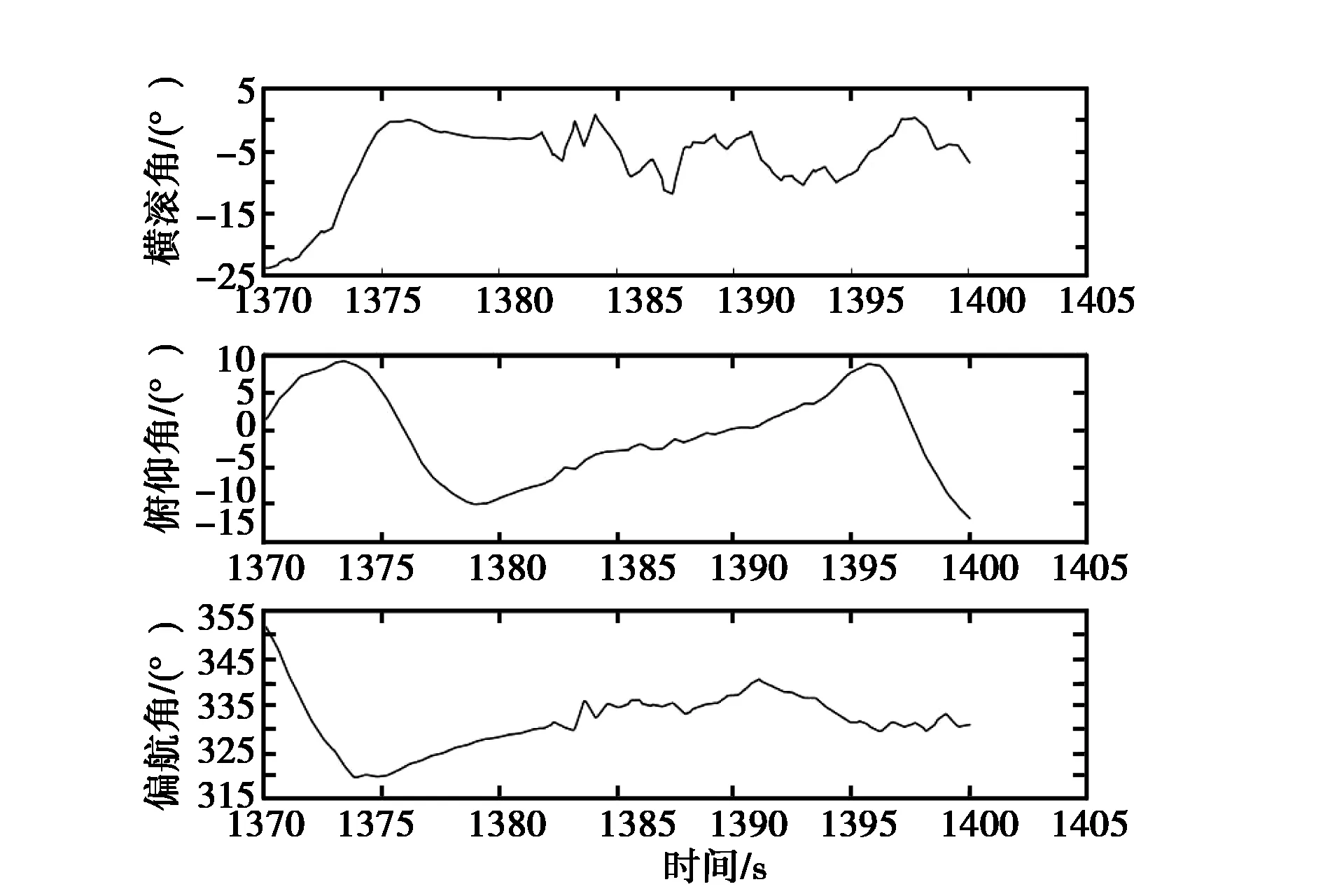
图10 第一次实验机身姿态角
第一次实验的其中一段航迹如图9所示,图中红色条带为实际航迹到地面的延长线组成航迹为从图中右侧向左侧飞行,绿色直线为预设航线,可以看到航迹的高程和水平坐标上都与航线有偏差,在转弯进入航线时,转弯不足,越过了航线后修正回到航线上,但过冲后继续小幅度震荡,同时也导致了机体产生较大幅度的姿态变化,如图10所示,去除起始位置开始转向不足因而处于转向状态导致的大倾角,之后的近似直线航线中,俯仰角变化范围从-10°至9°;横滚角范围从-11°至1°;偏航角范围从320°至340°.从当天风向估计,该段航线实际上是逆风飞行,基本不受侧风干扰,在侧风干扰时的震荡将更剧烈,从以上机体航迹以及姿态记录显示机身姿态不稳,在此状态下进行航空拍摄,需要提升拍照频率以确保图像重叠度。
第二次实验完成整个自动航线38 km,测量落地后的剩余电量约为45%[23],以此推算最大航程约为70 km.
在第二次实验中某段航迹如图11所示,图中红色条带为实际航迹到地面的延长线组成航迹为从图中右侧向左侧飞行,绿色直线为预设航线,可以看到航迹的高程和水平坐标上都与航线基本重叠,进在部分区域有小幅度波动。机体轨迹的小幅度波动也反映在机身姿态上,如图12所示,转向完成后航迹最之后的近似直线航线中,俯仰角变化范围从2°至5°;横滚角范围从-3°至-1°;偏航角范围从161°至163°.从当天的天气记录看,该段航线为逆风飞行,并且有侧风分量,但侧风扰动导致的姿态震荡得到了有效抑制,并且航迹偏移也得到了有效控制。
图11 第二次实验截取分析航线
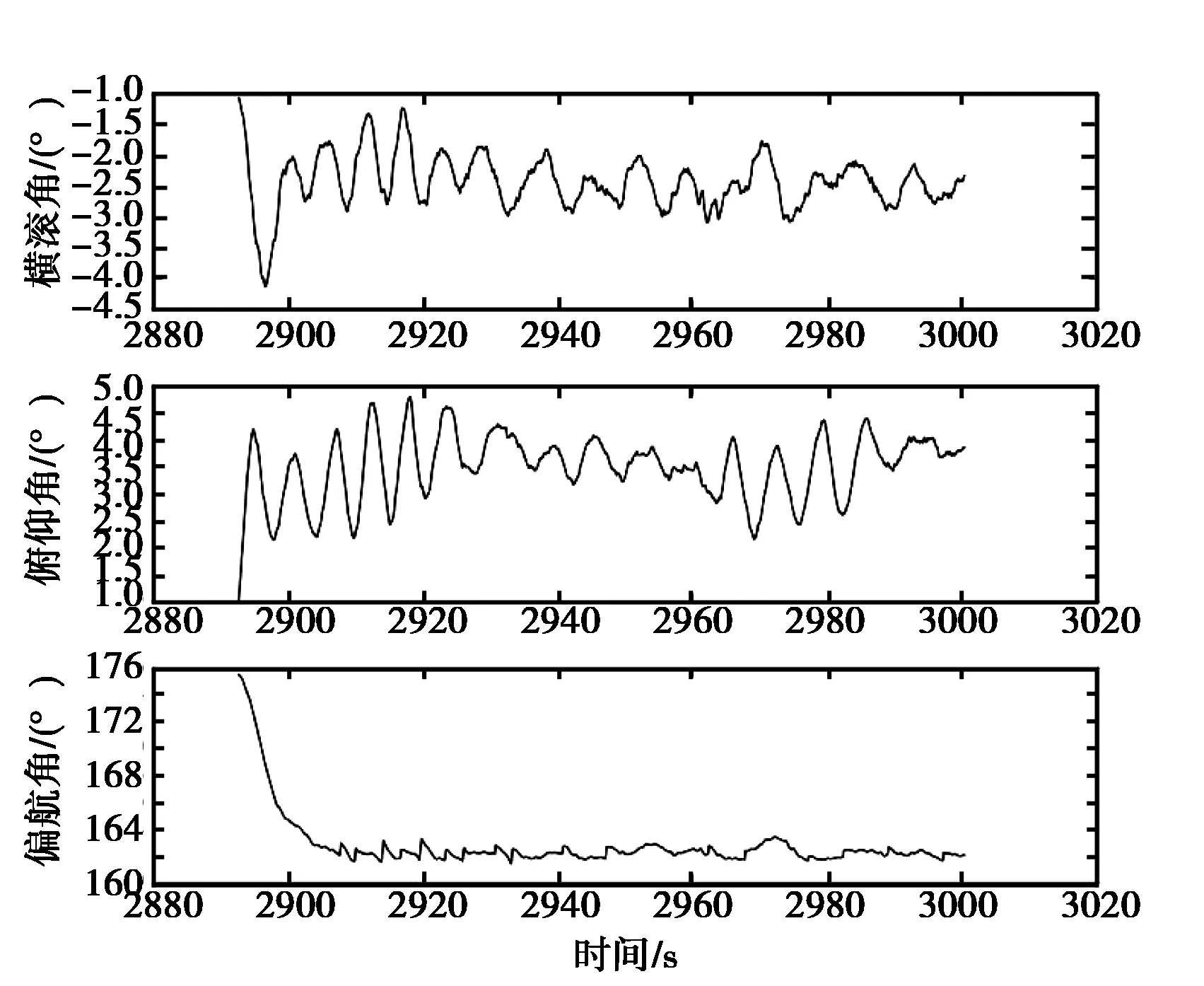
图12 第二次实验机身姿态角
4 结束语
本文设计并实现的无人机倾斜摄影系统,利用北斗/GPS定位获取更可靠的定位星座,减少了由于机身动作产生频繁姿变化引起低仰角卫星信号增益降低,失去有效卫星,进而导致的定位精度下降;并利用如今消费级无人机/航模器相关材普及后的廉价优势将航模改造为航测用飞行平台,降低了航测成本;并且通过测试调整,提升了平台的稳定性与续航能力,使得飞行平台能够满足基本的航测需求,在较大范围采集航拍图像的情况下,相比于直接使用商品化的多旋翼飞行器进行数据采集,有效减少野外作业架次,降低外业人员工作量。
在未来的工作中,将进一步利用现有的接收机模块,将北斗/GPS的RTK算法移植到单片机/嵌入式运算平台进行机载测试。同时,利用倾斜摄影序列图像的处理后能反推得到图像的外参(相对地物位置),对比RTK定位结果以及飞机当前姿态数据后,在无控制点状况下,能够获取地物的较精确位置/高程数据,同时有助于提升对地物进行三维重建的运算速度。以及考虑利用视觉—惯性里程计获得更好的低空飞行定位精度以及相对地速,提升航线精度[24-25],并且研究在不同地形状态及BD/GPS接收机定位状态下,下切换采用视觉—惯性里程计或者GPS定位,达到更高的定位可靠性。
[1] 徐洪根,钱玉国. 浅谈无人飞机航摄系统在应急测绘中的应用[J]. 江西测绘,2012(1):35-36,41.
[2] 杨永明. 无人机遥感系统数据获取与处理关键技术研究 [D]. 昆明:昆明理工大学,2016.
[3] 李卫正, 申世广,何鹏,等. 低成本小型无人机遥感定位病死木方法. [J].林业科技开发,2014,28(6): 102-106.
[4] 周洁萍,龚建华,王涛,等. 汶川地震灾区无人机遥感影像获取与可视化管理系统研究[J]. 遥感学报,2008,(6):877-884.
[5] 周兴霞. 应急测绘固定翼无人机倾斜航摄系统集成研究[D].成都:西南交通大学,2016.
[6] HONG Z H. Rapid three-dimensional detection approach for building damage due to earthquakes by the use of parallel processing of unmanned aerial vehicle imagery.[J].Journal of Applied Remote Sensing, 2015, 9(1): 1-18.
[7] 史文中,曹辉,张剑清. 基于高分辨率影像的城市三维建模[J]. 武汉大学学报(信息科学版),2004(9):783-787.
[8] 李立春. 基于无人机序列成像的地形重建及其在导航中的应用研究[D]. 长沙:国防科学技术大学, 2009.
[9] 何豫航,岳俊. 基于CMVS/PMVS多视角密集匹配方法的研究与实现[J]. 测绘地理信息,2013(3):20-23.
[10]李安福, 曾政祥, 吴晓明. 浅析国内倾斜摄影技术的发展[J]. 测绘与空间地理信息, 2014(9):57-59.
[11]林宗坚. UAV低空航测技术研究[J]. 测绘科学,2011(1):5-9.
[12]樊江川. 无人机航空摄影测树技术研究[D].北京:林业大学,2014.
[13]吴建德. 基于频域辨识的微小型无人直升机的建模与控制研究[D].杭州:浙江大学,2007.
[14]洪达,周磊,郑震山. 国外小型舰载固定翼无人机装备回收技术发展研究[J].飞航导弹,2014(4):50-54.
[15]高阳,董树荣,王德苗. GPS天线技术及其发展[J]. 无线通信技术,2008(4):34-39.
[16]吴甜甜,张云,刘永明,等. 北斗/GPS组合定位方法[J]. 遥感学报,2014(5):1087-1097.
[17]刘永明,张云,袁国良. GPS/北斗-2组合定位性能的研究[J]. 电子设计工程,2013(14):121-123,126.
[18]魏萍. 基于ARM的嵌入式航向姿态参考系统的研究[D].杭州:浙江大学,2006.
[19]孙罡. 低成本微小型无人机惯性组合导航技术研究[D].南京:南京理工大学,2014.
[20]习业勋, 邓联文, 张纪阳,等. 基于多核架构无人机飞行控制系统设计与实现[J]. 电子测量技术, 2014, 37(10):89-94.
[21]史兴隆. 基于Pixhawk飞控板的固定翼模型飞机控制技术研究[D].北京:北方工业大学,2016.
[22]王冬来,吕强,刘峰,等. 基于L_1自适应方法的四旋翼飞行器纵向控制[J]. 弹箭与制导学报,2011(6):37-40.
[23]Mathematics Department at UBC. Pansonic NCR18650B Lithium-ion battery data sheet[EB/OL]. (2017-05)[2017-05-11].
[24]樊珑. 多旋翼无人机视觉引导降落研究[D].哈尔滨:哈尔滨工业大学,2016.
[25]王超磊,王田苗,梁建宏,等. 小型无人直升机单目视觉FastSLAM研究[J]. 高技术通讯,2013(10):1061-1067.
Design and Realization of Low Cost UAV Oblique Photography System Based on BeiDou
XU Shenyuan,ZHANG Yun,HONG Zhonghua,YANG Shuhu,HAN Yanling
(CollegeofInformationTechnology,ShanghaiOceanUniversity,Shanghai200136,China)
Micro low-cost unmanned aerial vehicle (UAV) has the advantages of less restrictions for landing and takeoff, convenient transportation and relatively low cost. It is widely used in small-scale and decentralized regional photogrammetry, but the design of low-cost UAV have to trade-offs and compromise between positioning accuracy, voyage, payload and many other aspects. Therefore, it is necessary to improve the efficiency of the low-cost UAV photography, build a low-cost fixed-wing unmanned aerial vehicle, using Beidou/GPS combination positioning to increase the number of high-elevation satellites to avoid the reduce of the positioning accuracy caused by the attitude changes; Two synchronized sport camera as the photography payload; the entire system cost control in less than ten thousand. According to the test flight time and the remaining power of the battery, this UAV have an operating time of about 1 hour and 30 minutes, and operating range about 70 km.
Low cost UAV; BeiDou positioning; aerial imaging; oblique photography
10.13442/j.gnss.1008-9268.2017.03.011
2017-04-26
国家自然科学基金(批准号:41376178;41401489;41506213)
P228.4
A
1008-9268(2017)03-0054-07
徐申远 (1992-),男,硕士研究生,主要从事无人机遥感技术研究。
张云 (1974-),男,教授,主要从事GNSS定位导航、GNSS-R技术研究。
联系人: 徐申远E-mail: 740954119@qq.com