一种小型无人机的航迹跟踪算法
2017-09-08吴长胜
吴长胜
摘 要:航迹跟踪算法是小型无人机航迹规划的关键技术之一,为无人机姿态回路提供控制输入。通过分析小型无人机的飞行模态,进行航迹跟踪算法设计。利用Matlab进行仿真试验验证,此方案具有良好的航迹跟踪性能。
关键词:小型无人机;飞行模态;航迹跟踪;仿真试验
中图分类号:V279 文献标志码:A 文章编号:2095-2945(2017)24-0004-02
引言
无人机要求其具有较强的自主飞行控制能力,以适应执行飞行任务的需要,航迹跟踪是实现小型无人机按预定航线飞行或执行特定飞行模态的重要支撑技术,航迹跟踪算法根据无人机姿态数据、当前位置、航线信息及对应航线的侧偏距等飞行数据,引导无人机顺利进入并稳定在预定的航迹上[1],通过自主导航、航迹跟踪与姿态控制使无人机可靠执行飞行任务。
1 小型无人机飞行模态
在飞行过程中,无人机飞行模态主要包括航线飞行、定点盘旋、指点飞行、返航等[2]。航线由根据既定飞行任务制定的多个航点进行直连规划的折线组成,航线飞行实现指定区域的巡察任务;定点盘旋进行固定目标的连续侦察或通过该模态提供指示任务;指点飞行根据临时任务引导无人机到指定位置完成任务;返航是无人机以最优距离返回指定降落地点,实现无人机的回收任务。无人机在飞行过程中,根据任务性质可进行航线飞行、定点盘旋、指点飞行、返航等飞行模态的自由切换。
2 航迹跟踪算法设计
航迹跟踪算法通过机载GPS获得无人机的当前位置,计算无人机偏离预期航线的侧偏距,并结合无人机姿态信息,进行控制指令解算,通过姿态控制回路解算出执行机构控制量,从而消除无人机侧偏距并修正飞行航迹[3][4],实现无人机空中航线飞行、定点盘旋、指点飞行及返航等飞行模态。
2.1 航线飞行
无人机航线跟踪包括切入首航点、航线跟踪、航线切换即转弯飞行等阶段。根据三个过程阶段分别进行跟踪算法设计,满足航线飞行需求。
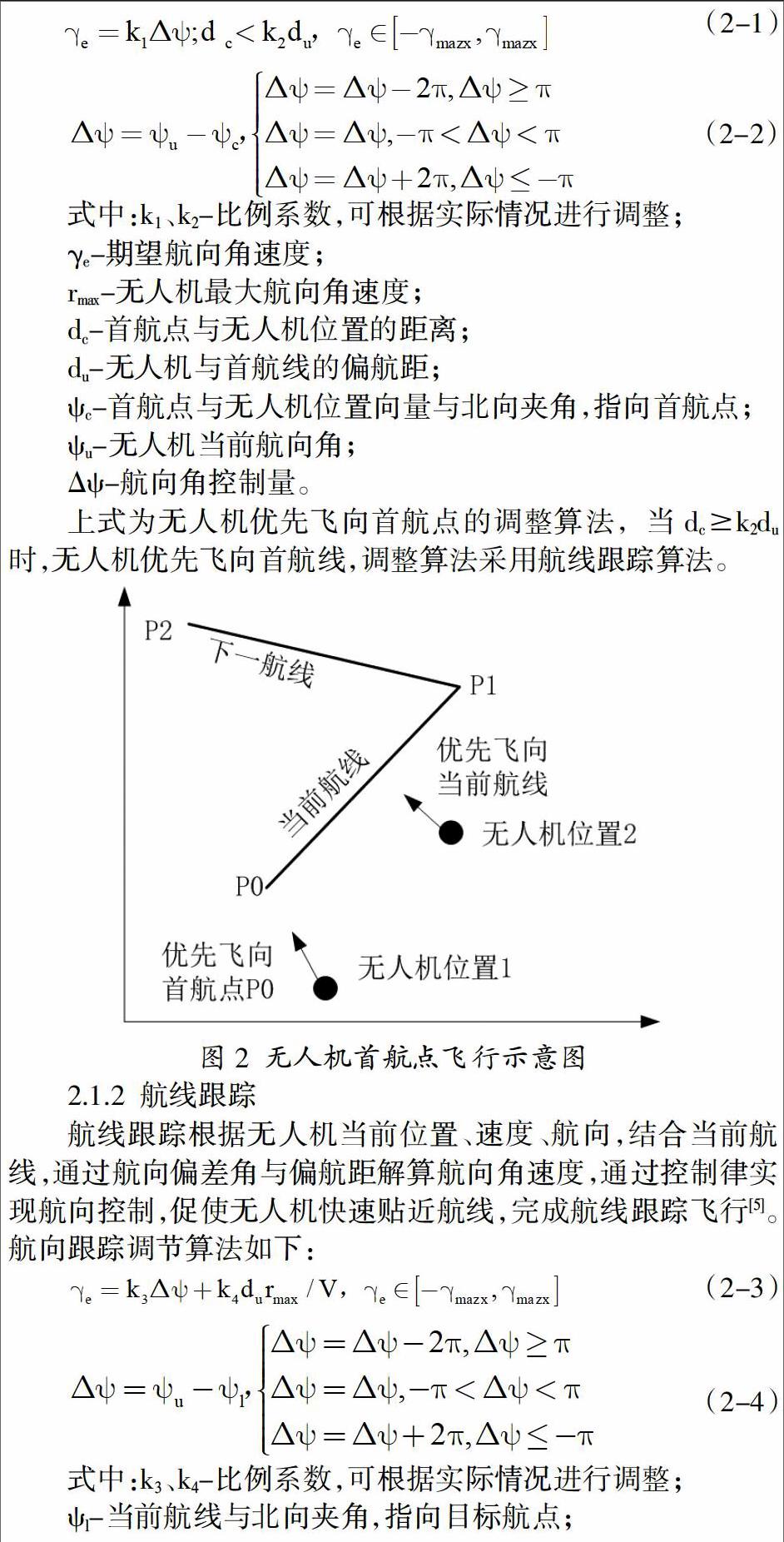
2.1.1 首航点飞行
首航点飞行根据当前无人机位置,结合首行点位置、首航线特征,判断无人机优先飞向首行点或首航线,首航点飞行调整算法如下:
上式为无人机优先飞向首航点的调整算法,当dc?叟k2du时,无人机优先飞向首航线,调整算法采用航线跟踪算法。
2.1.2 航线跟踪
航线跟踪根据无人机当前位置、速度、航向,结合当前航线,通过航向偏差角与偏航距解算航向角速度,通过控制律实现航向控制,促使无人机快速贴近航线,完成航线跟踪飞行[5]。航向跟踪调节算法如下:
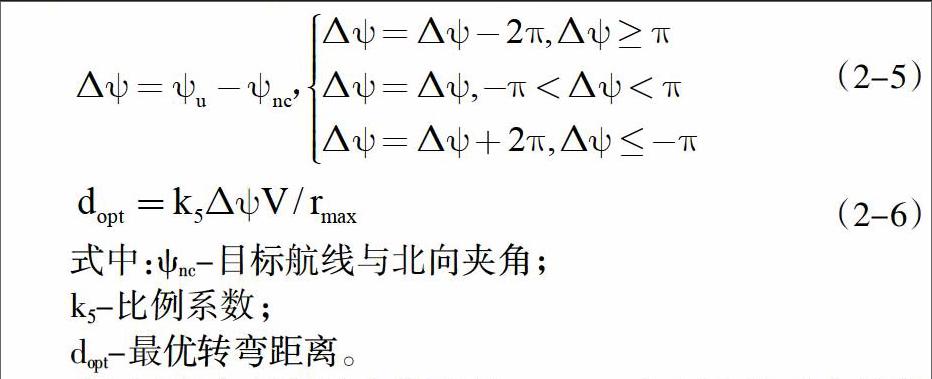
2.1.3 转弯飞行
转弯飞行主要是完成当前航线与目标航线的最优切换,通过计算最优转弯距离、过点判断进行无人机转弯与进入目标航线的连续跟踪。最优拐弯距离计算:
当无人机与目标航点的距离dc?燮dopt时,无人机进入转弯飞行状态。无人机采用半角判断是否完成航线切换,如下图所示,当无人机转过航线夹角的角平分线时即完成转弯,进入下一航线飞行。
2.2 定点盘旋
定点盘旋根据侦察任务需要对特定目标进行绕飞实现持续侦察或目标指示[6][7]。结合无人机最小转弯半径与导引头视场,规划外切多边形实现近圆盘旋飞行,可以直接复用航线飞行的跟踪算法完成定点盘旋飞行。在设计多边形航线时应确保多边形最大内切圆半径大于无人机的最小转弯半径,并且在导引头视场范围之内。
式中:Rn-多边形最大内切圆半径;R-无人机的最小转弯半径;Rs-导引头视场半径;V-无人机速度;?准-无人机转弯最大倾斜角;g-重力加速度。
2.3 指点飞行与返航
无人机指点飞行(返航)是根据当前无人机位置与指定点(返航点)进行直线规划,实现无人机按照最短距离完成目标点飞行。此时无人机仅实时调整航向,保证无人机准确飞向指定点(返航点)。无人机指点飞行与返航时采用式2-1与式2-2进行航向调整。
3 仿真试验结果
通过对小型无人机航迹跟踪算法设计,利用Matlab进行仿真分析,验证航迹跟踪算法的可行性。在仿真分析中,式(2-1)中比例系数k1=-0.85,k2=3,最大角速度rmax=15°/s,式(2-3)中比例系数k3=-1.25,k4=-1,式(2-3)中比例系数K5=1,无人机速度V=30m/s。
4 结束语
本文研究了一种小型无人机的航迹跟踪算法,通过Matlab仿真试验验证,具有较好的航迹跟踪性能。针对定点盘旋提出多边形航线规划,满足目标持续监视效果,进一步优化航迹跟踪算法设计。此航迹跟踪算法立足平面化,未考虑无人机高度变化,在后续的研究中引入相对飞行高度,完善航迹跟踪算法设计。
参考文献:
[1]陈锦霞.一种无人机的航迹规划和自主导航算法[J].科技风,2012,22:24.
[2]屈蔷,梅劲松,袁家斌.小型无人机GPS自主导航算法的研究与实现[J].大众科技,2006,3:47-48.
[3]蒋志华,陶德桂,小型无人机航路规划及自主导航算法研究[J].现代电子技术,2015,38(4):5-7.
[4]韩泉泉,陈知秋,田雪涛,等.无人机航线跟随控制方案设计与实现[J].电子设计工程,2014,22(11):1-4.
[5]李洪烈,周洪霞,薛先俊.基于航迹点控制的无人机目标跟踪算法[J].信息技术,2013,3:113-116.
[6]王洋,劉伟.盘旋跟踪地面目标小型无人机控制系统设计[J].北京航空航天大学学报,2010,36(10):1252-1255.
[7]祝小平.无人机设计手册[M].北京:国防工业出版社,2007.endprint
