研究生课程“智能控制”教学改革与实践
2017-09-08吴怀宇
陈 洋, 吴怀宇, 程 磊
(武汉科技大学 信息科学与工程学院, 湖北 武汉 430081)
研究生课程“智能控制”教学改革与实践
陈 洋, 吴怀宇, 程 磊
(武汉科技大学 信息科学与工程学院, 湖北 武汉 430081)
“智能控制”是自动化相关专业研究生的重要课程。该课程具有教学内容繁多、理论性强、系统性差等特点,本文分别从教学内容、教学方式、考核方式等方面对该课程进行了改革和探索。通过突出教学重点、协调基础知识与前沿发展、借鉴互联网优势、以学生能力培养为中心等手段,获得了较好的教学效果。
智能控制;教学方式;绿色通道
0 引言
普遍认为,智能控制理论是继经典控制理论、现代控制理论之后的第三代先进控制理论[1]。
“智能控制”通常是自动化专业或控制类专业研究生的必修或选修课程。该课程教学内容主要针对工业过程系统、航空航天系统、机器人系统等各类复杂系统中存在的非线性、不确定性、强耦合等困难提出各种特殊的控制理论和解决方法。智能控制理论与以往控制理论最大不同之点在于利用了生物和人类经验的提取方式和存储方式,为此提供了一种抽象的、非精确的新型建模方式。
随着近几年人工智能领域先进技术的进步,智能控制领域的发展对课程教学提出了新的要求。根据近几年对该课程的教学实践,我们对本课程的设置与建设进行了多方面的思考和探索。
1 课程特点
1.1 教学内容的特点
智能控制作为新一代先进控制理论,其主要特色体现在多学科交叉、理论性强、内容繁多,但是系统性和严谨性还较差。纵观国内的“智能控制”课程的教材,主要以讲授专家控制、模糊控制、人工神经网络控制、智能优化算法等内容为主,有的教材还会介绍学习控制[2-3]。上述几方面的内容通常是学术界认为比较成熟的理论和方法。相比而言,还有很多正在快速发展中的智能控制技术的分支,例如迭代学习控制、数据驱动控制、深度学习控制、强化学习控制等,通常没有纳入到现有的教材体系当中[4-6]。
由于智能控制理论的分支很多,且各自理论基础差异较大,甚至各自独立成体系,因此这种授课内容分散的特点破坏了课程的完整性和严谨性,给学生的掌握也带来了一定的困难。例如,在讲授模糊控制理论时,首先必须介绍模糊数学相关基础知识,否学生根本无法理解模糊控制的实现过程。模糊数学与工科学生在本科阶段所学的所有数学分支均有很大的不同,具有更加抽象的特点,使该课程的理论色彩更加浓厚。与此类似的是,在介绍人工神经网络控制理论时,必须介绍人工神经网络的基础知识。该分支与模糊控制具有完全不同的建模思想。借助于控制理论将多个不同学科领域的知识结合在一起是“智能控制”这门课程的一大特点。
1.2 授课对象的特点
硕士研究生是本科阶段学习的升华,需要在已有的基础上,进一步强化专业方向和具体化研究领域。选修“智能控制”课程的学生通常来自不同的知识背景和专业背景,除了自动化、电子信息工程、电气工程等专业的学生之外,还会有少量的机械电子、交通运输等相近专业的学生。而这些学生中有少部分人在本科阶段可能已经接触过“智能控制”课程,虽然对该课程的理解非常浅显,但已有简单的了解和掌握。而更多的学生并没有接触过该课程。这种参差不齐的知识背景给授课教师带来了困难。
根据以往的教学经验,实际情况中还有少量研究生选课目的过于功利化,他们只是为了完成学分任务,选修该课程时也没有考虑自己未来可能参与的研究课题。这种不恰当的动机也影响了课程教学效果。
2 目前现状及存在的问题
研究生教学需要培养具有一定创新能力,能够掌握科技前沿的专业人才。针对授课对象的现状,“智能控制”的教学过程需要处理好以下几个方面的关系:
2.1 处理好本课程与相关课程的关系
“智能控制”课程在教学时要清楚教学目标。该课程主要介绍人工智能理论是如何与控制理论结合的,这里的“结合点”是关键,否则容易导致教学内容与“人工智能”、“自适应控制”、“系统辨识”、“模式识别”等课程重复。此外,智能优化算法也应适当介绍,要避免与其它专门介绍优化算法的课程重复。相关课程之间的联系如图1所示。
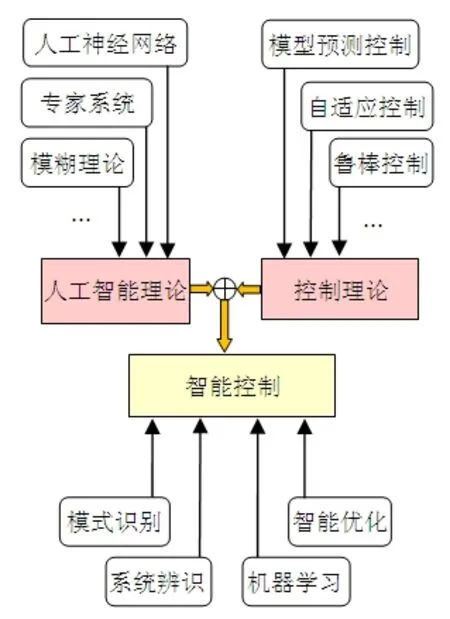
图1 “智能控制”相关课程之间的关系
2.2 把握好课程教学重点
“智能控制”教学内容比较多,往往分为几个模块。为了使学生能够在较有限的课堂教学时间内,最大限度地深入理解并掌握智能控制的精髓,建议最好能够精简教学内容,切忌过多过泛。最容易出现的问题便是什么领域的知识都涉及,可是什么都介绍不深入,学生只能了解到相关的概念和表面问题,无法对智能控制技术的实现方法有真正的掌握。
2.3 协调好基本教学内容与学科前沿
“智能控制”的基本教学内容通常包括专家控制、模糊控制与人工神经网络控制。但是随着技术的发展,不同的领域正发生着深刻的变化。图2统计了维普中文数据库EI收录源期刊以“专家系统”、“模糊控制”、“神经网络”为关键词检索的近十年论文数目。该图清晰地表明了相关研究领域的发展趋势。“智能控制”课程教学中既要介绍经典成熟的基本内容,又要介绍学科发展前沿。教师选择教学内容时要结合学科优势方向和科研项目背景有选择性和针对性地讲授。
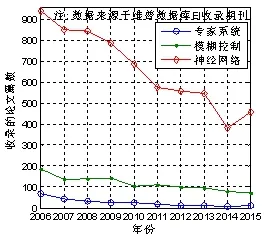
图2 智能控制相关研究领域的发展趋势
2.4 利用好各类视频公开课资源
目前国内外高校教学方式正在发生深刻的变革,时空固定的教学方式正受到来势汹涌的各类视频公开课、慕课、微课堂等冲击。其中比较有影响力的如MIT公开课、Coursera公开课、网易公开课等。“智能控制”课程涉及的所有教学内容不可能全部都在课堂上讲授,必须充分利用现有公开的互联网资源为学生提供更加便利的学习方式。尤其是一部分来不及在课堂上深入展开介绍的人工智能技术,学生正好可以在课后根据个人兴趣去搜索相关的课程网站加以补充。
3 教学内容上的改革
3.1 精简内容,突出工程性
从工程技术的角度出发,应用广泛的智能控制技术主要包括模糊控制技术和神经网络控制技术。本课程的课堂教学宜精选具有工程应用代表性的典型内容作为案例重点讲授。为了突出应用性,应弱化理论性的教学内容而突出工程应用的技术实现方法。以模糊控制为例,课程的教学最好能结合工业过程控制案例进行讲解。通过从现场操作人员的经验中提取模糊规则,进行模糊控制,研究并建立输入量与输出量之间的模糊关系。然后采用输入量的模糊化和输出量的逆模糊创建与实际控制系统的接口,以实现精确控制。
3.2 仿真实验,提升创新能力
除了工程应用领域的教学内容之外,还有一部分涉及理论研究和仿真验证的内容。为了提高研究生的理论研究素养,提升学生的创新能力,开展仿真实验是非常有必要的。例如,目前四旋翼无人机的控制越来越受到人们的关注,设计相应的智能控制器,例如,设计模糊PID控制或者神经网络自适应控制器进行仿真验证其理论可行性,可以较好地培养学生进行仿真研究的能力。
3.3 介绍前沿,跟踪发展趋势
研究生创新能力的培养要面向未来,因此在课堂上介绍一些研究领域的前沿问题和发展趋势是非常必要的。这种前沿课题的介绍不宜采用学术报告的形式,最好在各个教学内容结束时,适当引入发展趋势的讲解。例如,在介绍人工神经网络知识时,可以适当介绍当前发展迅速的深度学习概念。将深度学习的发展历程说明清楚,让学生对学科发展规律有所了解,以此鼓励他们坚持一个感兴趣的方向作深入的研究。此外,近年来深度学习在语音识别、图像识别等领域获得了较大的成功,但是还未在控制领域获得广泛发展。介绍深度学习的基本知识有助于学生从事新方向的研究并获得创造性的成果。
4 教学方法上的改革
在新的教育形势下,研究生课程的教学也需与时俱进,可以结合“互联网+”新思维,采用一些更加开放、更加便利的教学手段进行尝试。根据以往的教学经验,可以从以下几个方面进行改革:
4.1 建立项目小组模式
“智能控制”课程在教学过程中,允许选课学生自由组合成项目小组。教师为小组布置项目课题。通常可以选择近年来发表的具有代表性的国际期刊论文作为小组共同学习的资料。以理解智能控制技术的原理和应用方法为目标,各小组分工合作,分析论文的研究内容和创新性。该教学方法对学生的指导作用至少在两个方面具有非常积极的作用:一是任务具体,针对性强,学生容易上手并深入学习。实践表明该方法对培养学生的英文阅读能力,研究方法均有很大的帮助;二是使参与小组研究的学生可以真正把握某一个智能控制技术的精髓和发展前沿,并且在理解研讨论文创新点的基础上,提出自己的观点和改进策略,甚至可以直接深入到课题的研究中。
4.2 设立答辩环节
毕竟选课学生的学科知识的掌握程度有限,教师必须主动参与项目小组里学生的自主学习过程,而且要给予适当的引导和答疑解惑。根据经验,各项目小组对研讨的结果都要以报告形式为所有同学进行讲解并接受答辩。此过程中,教师扮演两个角色,一是为答辩内容进行指导,对研讨内容中存在的疑问进行解答,二是对答辩小组研究工作的深入程度进行考核,同时还要确定小组各成员在研讨过程中完成工作的比重,以此作为考核的依据。
5 考核方式上的改进
本课程采用了多元化的考核模式,主要有以下几个方面:
5.1 开放式考核机制
本课程主要选择了开放性考核方式,这种考核方式包括:项目答辩、仿真实验大作业和论文报告。
(1)项目答辩方式主要考查对某一篇相关学术论文的理解和消化能力。学生选择自己感兴趣的某一项智能控制技术,深入学习和理解,在一定条件下复现学术论文的理论推导和验证过程。
(2)仿真实验大作业则以指导教师布置的题目为基础,开展理论分析、方案设计、数据采集与仿真验证。该方式主要考查学生运用所学知识提出问题、分析问题并通过编写程序解决问题的能力。
(3)论文报告则属于最高层次的考核方式,要求选课学生根据所学知识就某一个具体的智能控制问题,通过分析和提出解决方案,完成一篇结构完整、内容翔实的工作报告。
而在实际操作过程中,并不是三种考核方式都用,而是选课学生从三种方式中任选一种作为自己的考核方式。针对不同的考核方式指导教师分别制定详细的评分等级,并提供给学生参考。例如,2014级和2015级研究生均采用了项目答辩和仿真实验大作业相结合的考核方式,实践表明该方式可以在一定程度上充分调动学生的学习积极性。
5.2 设立绿色通道考核模式
课程教学总是以培养学生能力为宗旨。就课程知识而言,是不可能全部纳入到课堂教学中来的,即使如此学生也不可能完全吸收。因此,课程教学只要能提升学生解决问题的能力,便达到了教学的目的。基于此,本课程提出了绿色通道考核模式。当选课学生依据课程所学内容,在某一方面提出具有创新意义的成果时,无论是理论上的或是实践性的,凡是能经得起验证的内容均具有获得考核及格甚至优秀的评价。近两年实践表明,学生非常欢迎该方式。主要原因在于该模式给予学生极大的灵活性。学生乐意去寻找自己感兴趣的智能控制课题展开深入研究,而且有针对性地获得相关的指导和帮助。
6 结语
本文探讨了“智能控制”课程教学的若干改革思路和实践结果。主要从课程关系的把握、教学内容与教学方法以及考核手段的改进等几个方面进行了尝试。实践经验表明该思路是可行的,学生对该课程的热情得到了激发。在教学过程中,学生很容易就某一具体的智能控制技术提出自己的见解。
近些年智能控制领域又涌现出了大量的新兴技术。纵观国内外的发展,智能控制与其它学科相互交叉融合的趋势越来越明显,这也表明智能控制学科的内涵也将变得越来越丰富。“智能控制”课程的教学工作也需要授课教师具有更加全面和深入的学科认识和理解。
[1] 陈爱斌, 肖晓明, 魏世勇, 陈白帆. 智能控制的学科发展与学科教育[J], 长沙:现代大学教育. 2006, 102-105
[2] 孙增圻, 邓志东, 张再兴. 智能控制理论与技术(第2版)[M], 北京:清华大学出版社. 2011
[3] 刘金琨. 智能控制(第3版)[M]. 北京:电子工业出版社. 2014
[4] 于小娟, 齐向东, 吴聚华. 迭代学习控制理论与应用[M]. 北京:机械工业出版社. 2005
[5] 侯忠生, 金尚泰. 无模型自适应控制--理论与应用[M]. 北京:科学出版社. 2013
[6] 段艳杰, 吕宜生, 张杰, 赵学亮, 王飞跃. 深度学习在控制领域的研究现状与展望[J]. 北京:自动化学报, 2016, 42(5): 643-654
[7] 杨凌宇, 张晶, 郑征, 王青, 申功璋. 航空航天学科研究生《智能控制》教学研究[C]//杭州:全国自动化教育学术年会, 2013
[8] 胡蓉, 钱斌, 祝晓红. 研究生“智能控制”课程教学改革与实践[J]. 南京:电气电子教学学报, 2015(5): 3334
New Exploration on Graduate Course on Intelligent Control
CHEN Yang, WU Huai-yu, CHENG Lei
(SchoolofInformationScienceandEngineering,WuhanUniversityofScienceandTechnology,Wuhan430081,China)
Intelligent Control is one of the important courses for the graduate students in electric engineering or automation major. The course has the characteristics of many teaching contents and strong theoretical and individually systemic. We carried the reforms from the teaching content, teaching methods, assessing methods, and so on. We conquer those difficulties by highlighting the teaching focus, coordinating between the basic knowledge and the forefront, employing the advantages of the Internet, as well as centralizing the students' abilities cultivation. All of the above practice gets good results.
intelligent control; teaching method; green channel
2016-09-08;
2016-11- 17
2015年教育部高等学校自动化类专业教学指导委员会专业教育教学改革研究课题(2015A13),武汉科技大学研究生教学研究项目(Yjg201508)。
陈 洋(1980-),男,博士,副教授,主要从事移动机器人建模与控制的教学和研究,E-mail:chenyag@wust.edu.cn
G42
A
1008-0686(2017)04-0076-04