双臂机器人协调搬运运动的运动学分析*
2017-09-08曹彩霞赵明扬朱思俊关丽荣
曹彩霞,赵明扬,朱思俊,,3,关丽荣
(1.沈阳理工大学 机械工程学院,沈阳 110159;2. 中国科学院沈阳自动化研究所 扬州工程技术研究中心,江苏 扬州 225127;3. 中国科学院沈阳自动化研究所,沈阳 110016)
双臂机器人协调搬运运动的运动学分析*
曹彩霞1,3,赵明扬2,朱思俊1,2,3,关丽荣1
(1.沈阳理工大学 机械工程学院,沈阳 110159;2. 中国科学院沈阳自动化研究所 扬州工程技术研究中心,江苏 扬州 225127;3. 中国科学院沈阳自动化研究所,沈阳 110016)
针对双臂机器人协调搬运运动模式,文章提出了一种新的坐标系变换方法。以双SCARA机器人组成的双臂机器人为研究对象,首先运用DH算法推导出单臂SCARA机器人的运动学方程。然后建立双臂机器人协调搬运坐标系,找出搬运工件与双臂机器人的约束关系,根据规划的搬运工件轨迹求出主机械臂末端的运动轨迹,根据主机械臂各个关节的实际关节角度求解出从臂的运动轨迹。最后采用Adams与MATLAB联合仿真实验平台进行仿真验证,实验结果表明双臂机器人可以完成定姿态与变姿态两种运动模式。
双臂机器人;协调运动;运动约束
0 引言
随着科学技术的发展,机器人已经广泛应用于工业现场、空间探索、社会服务等场合,而双臂机器人相比单臂机器人由于其具有较大的工作负载能力,对复杂装配有较强的适应性[1],对物体搬运有较好的稳定性等优势,能完成很多单臂机器人无法完成的任务,近年来成为国内外学者研究的热点。双臂机器人的协调作业分为松协调与紧协调[2]。紧协调要求工件与机器人的末端夹持器无相对运动,而松协调要求机器人与工件在某些点位上有约束关系。
张铁等提出双机器人变姿态协调跟随运动路径离线生成的更换工具坐标系方法,并通过实验实现了机器人变姿态直线和圆弧协调跟随运动[3]。陈峰等把SCARA机器人组成的双臂机器人运动看做平面内的四边形运动,最终求解出一条最优的无碰撞运动轨迹[4]。文献[5]提出了一种双机器人协调运动约束与协调轨迹规划示教方法。Ming-Jiang等[6]提出了基于模型预测控制的双臂主从机器人力位混合控制算法,刘佳等[7]基于Udwadia-Kalaba方程提出了一种双臂协调机械手动力学建模的新方法。王美玲[8]等提出一种能够避免双臂机器人在运动过程中出现关节运动范围限制、奇异形位等问题的运动约束方法。文献[9]针对不同型号的工业机器人组成的双焊接机器人提出了一种优化的主从协调运动控制算法。
目前大多数研究对双臂机器人中从臂的轨迹进行规划时都认为主臂的规划轨迹即为实际轨迹。不考虑由于一些其他因素的影响(例如驱动器延时)导致主臂每个关节的实际角度与期望的角度有误差。从而导致主臂的末端与从臂在末端协调搬运时有相对位移。本文在确定从臂的运动轨迹时提出了一种新的坐标变换方法。根据主机械臂各个关节的实际关节角度求解出从臂的运动轨迹。以两个SCARA机器人组成的双臂机器人为研究对象,提出一种双机器人协调搬运运动约束方法。首先运用DH算法推导出单臂SCARA的运动学方程。然后建立双臂机器人坐标系,给出机器人协调运动时的约束关系并进行相应的坐标变换。最后通过Adams与Matlab联合仿真进行定姿态与变姿态协调搬运运动的仿真验证。
1 单臂SCARA运动学模型建立
以两个SCARA机器人组成的双臂机器人为研究对象,每个SCARA机器人有四个自由度,其中前三个自由度确定机器人末端法兰的位置,最后一个自由度确定机器人的姿态。采用DH[10]参数法构建其单臂运动学模型,其坐标系建立如图1所示。其中l1,l2,分别代表大臂,小臂的长度。

图1 单臂坐标系建立示意图
其DH参数如表1所示,αi-1,ai-1,di,φi分别代表机器人的连杆扭角,连杆长度,关节距离,关节转角。

表1 DH 参数
将DH参数带入齐次变换矩阵(1) 依次右乘便得到SCARA机器人单臂末端法兰的位姿矩阵(2):
(1)
(2)
因此其末端法兰的位置、姿态坐标为:
(3)
(4)
(5)
其中,c1,s1,c2,s2,c4,s4,c12,s12,c123,s123分别表示为cosθ1,sinθ1,cosθ2,sinθ2,cosθ4,sinθ4,cos(θ1+θ2),sin(θ1+θ2),cos(θ1+θ2+θ3),sin(θ1+θ2+θ3)。
对上述的正运动学方程反解即可得到单臂SCARA机器人的逆运动学方程,即给出机器人手臂末端的位置和姿态就可求出各个关节的角度与未知的连杆长度。
(6)

(7)
d3=-pz
(8)

(9)
由公式(6)的表达式可得机器人在同一位姿情况下存在两个解,其正负分别对应着双臂机器人的右手工作模式和左手工作模式。
2 双臂协调运动分析
如图2所示,建立双臂机器人坐标系。双臂机器人末端法兰与搬运物体之间为刚性连接。[B]为双臂机器人基座坐标系,[R1]为机器人右臂基座坐标系,[R2]为机器人左臂基座坐标系。[E1]为机器人右臂末端法兰坐标系,[E2]为机器人左臂末端法兰坐标系,[O]为工件坐标系。工件坐标系与双臂机器人基座坐标系之间的变换关系可以描述为:
(10)
(11)
(12)
其中:
(13)
根据第二节的逆运动学方程,可以实时求解出右臂各个关节的角度。
将式(10)与式(11)联立可以得到:
(14)
通过等式(13)可以得到:
(15)
其中:
(16)
(17)
将式(10)与式(11)带入式(15)可以得到:
(18)
由式(6)~式(9)同理可以求解出左臂各个关节的角度。

图2 双臂机器人运动学约束
3 仿真验证
为验证算法的正确性,针对双臂机器人定姿态与变姿态两种协调搬运运动模式分别进行了仿真实验。仿真中机器人协调搬运运动约束中的各个常数矩阵如式(19)、式(20)所示:
(19)
(20)
双臂机器人定姿态协调搬运过程中,设定搬运目标的轨迹为螺旋线,搬运目标的齐次变换矩阵为:
(21)
其中:
(22)
在变姿态协调搬运过程中设定搬运目标的轨迹为圆弧线,设定搬运目标的齐次变换矩阵为:
(23)
其中:
(24)
根据所规划的搬运目标轨迹,本课题采用MATLB与Adams联合仿真来验证算法的正确性。其步骤如下:
(1)在SolidWorks中建立双臂机器人三维模型。
(2)将三维模型导入Adams中添加约束与驱动。
(3)用MATLAB将所规划的轨迹进行逆运动学反解,求解主臂的出各个关节的角度,通过与Adams的实时通讯来控制主臂各个关节的运动。
(4)MATLAB读出Adams环境下主臂的各个关节数值,并通过公式20计算出从臂的轨迹。通过运动学反解,求解从臂的出各个关节的角度,并通过与Adams的实时通讯来控制主臂各个关节的运动。
双臂机器人分别在定姿态与变姿态协调搬运过程中的运行状态、其定姿态与变姿态两种模式下的搬运过程的仿真截图分别如图3,图5所示。通过Adams的仿真动画可以直观的观察到,搬运过程平稳,在定姿态搬运过程中,姿态基本没有变化,在变姿态搬运模式下,姿态符合规划的预期。两种搬运模式下的其左臂末端,搬运目标,右臂末端笛卡尔空间轨迹如图4、图6所示。其位置误差如图5、图8所示。在定姿态搬运模式下,目标轨迹与期望轨迹的在x轴与y轴的最大误差0.06mm和0.15mm,z轴基本无误差。在变姿态搬运模式下,x轴与y轴的最大误差0.06mm和0.2mm。搬运目标的运行轨迹与期望轨迹吻合,证明了此约束方法的正确性。误差来源是:
(1)三维模型导入Adams后模型发生变化。
(2)MATLAB与Adams通讯时有一定的延迟。
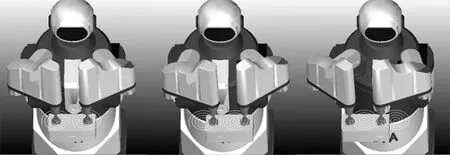
图3 双臂机器人定姿态协调搬运仿真截图

图4 双臂机器人定姿态协调搬运笛卡尔空间轨迹
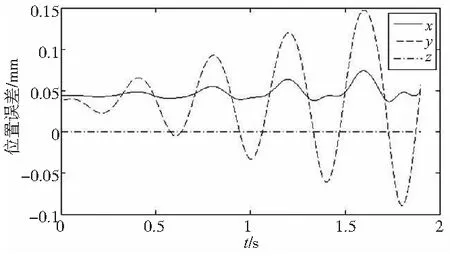
图5 双臂机器人定姿态位置误差

图6 双臂机器人变姿态协调搬运仿真截图

图7 双臂机器人变姿态协调搬运笛卡尔空间轨迹

图8 双臂机器人变姿态协调搬运位置误差
4 结论
本文以双SCARA机器人组成的双臂机器人为研究对象,提出了一种新的坐标系变换方法。在确定从臂的运动轨迹时,根据主机械臂各个关节的实时关节角度求解出从臂的运动轨迹。最后通过Adams与Matlab联合仿真验证了双臂机器人定姿态协调搬运螺旋线轨迹跟随与变姿态圆弧轨迹跟随,搬运目标轨迹与期望轨迹基本吻合,实验结果验证了变换方法的的正确有效。
[1] 钱东海,马毅潇,赵锡芳. 双臂机器人时间最优轨迹规划研究[J]. 机器人, 1999, 21(2):98-103.
[2] 陈安军,蔡建乐. 双臂机器人基于最优载荷分配的关节轨迹规划[J]. 河北大学学报(自然科学版), 2001, 21(3):316-321.
[3] 张铁, 欧阳帆. 双机器人协调跟随运动的运动学分析与路径规划[J]. 上海交通大学学报, 2013, 47(8): 1251-1256.
[4] 陈峰,丁富强,赵锡芳.双臂机器人无碰撞运动规划[J].机器人,2002,24(2):112-114.
[5] GAN Ya-hui, DAI Xian-zhong. Kinematic Cooperation Analysis and Trajectory Teaching in Multiple Robots System for Welding[C]. The IEEE 16th conference on Emerging Technologies & Factory Automation (ETFA). Piscataway, 2011, 1-8.
[6] Ming Jiang, Ming-Qu Fan, Ai-Min Li, et al. Coordination Control of Dual-Arm Robot Based on Modeled Predictive Control[C]. The IEEE international conference on Real-time Computing and Robotics. Angkor Wat., 2016.
[7] 刘佳,刘荣. 双臂协调机械手动力学建模的新方法[J]. 北 京航空航天大学学报, 2016, 42(9): 1903-1910.
[8] Meiling Wang, Min-zhou Luo, Xin Lin. Kinematic Constraints Formulation of Dual Redundant Arm Robot[C]. Proceeding of the 11th World Congress on Intelligent Control and Automation. Shenyang, 2014.
[9] 肖珺,何京文,张广军,等.不同型号双焊接机器人协调控制[J].上海交通大学学报,2010,44(s):110-113.
[10] 蔡自兴.机器人学 [M].北京:清华大学出版社,2000.
(编辑 李秀敏)
Kinematics Analysis of Dual Arm Robot Coordinated Motion
CAO Cai-xia1,3, ZHAO Ming-yang2,ZHU Si-jun1,2,3, GUAN Li-rong1
(1. School of Mechanical Engineering, Shenyang Ligong University, Shenyang 110159,China; 2. Yangzhou Engineering Technology Research Center, Shenyang Institute of Automation, Chinese Academy of Sciences, Yangzhou Jiangsu 225127,China)
For coordinated motion of dual-arm robots, this paper proposes a new coordinate transformation method. Taking the double SCARA robot as the research object, the kinematics equation of the single arm SCARA robot is derived by using the DH algorithm. Then, establish the coordinate system of the dual-arm robot to find out the constraint relationship between the moving parts and the robot. According to the trajectory of the workpiece, the trajectory of the master manipulator is obtained, and the according to the actual joint angle of the master manipulator and the trajectory of the workpiece, we get the trajectory of the slave manipulator. Finally, Adams and MATLAB are used to verify the dual-arm robot coordinated handling helical motion without posture change and circular motion with posture change, the experimental results show that two kinds of motion modes can be achieved by the dual-arm robot.
dual-arm robot; coordinated motion; motion constraint
1001-2265(2017)08-0044-04
10.13462/j.cnki.mmtamt.2017.08.011
2017-05-07;
2017-06-13
江苏省科技计划(BY2015063-01)
曹彩霞(1991—)女,沈阳人,中国科学院沈阳自动化研究所与沈阳理工大学联合培养硕士研究生,研究方向为机器人技术,(E-mail)caocaixia@sia.cn。
TH166;TG659
A
