基于Matlab的大坝静动力分析可视化系统设计
2017-09-07于印薛松
于印+薛松
摘要:大坝的安全是关乎国家利益的问题,建立完整的大坝监测系统有利于大坝工作人员更好的监控大坝的运行情况。本文利用Matlab软件,设计了一套大坝静动力分析可视化系统,能够在三维当中形象的显示大坝的应力应变情况,并且将处理过的应力应变数据在二维平面内可视化,以辅助大坝动态监测与安全评测。
关键词:大坝三维可视化;三维云图显示;大坝安全监测
中图分类号:P315 文献标识码:A 文章编号:1007-9416(2017)05-0198-01
目前国内外对于高土石坝的地震灾变过程预测和安全控制尚停留在近似分析加经验判断阶段,急需研究提出科学的预测理论和先进实用的安全控制技术,《国家中长期科学和技术发展规划纲要》(2006-2020)在其重点领域“公共安全”优先主题“重大自然灾害检测与防御”中明确要求“重点研究开发地震、台风、暴雨、洪水、地质灾害等监测、预警和应急处置关键技术,森林火灾、溃坝、决堤险情等重大灾害的监测预警技术以及重大自然灾害综合风险分析评估技术”。因此,加强高土石坝地震灾变机理分析及数值模拟和地震安全控制技术研究有着重要的意义。国外发达国家在监测自动化及监测信息管理系统的开发起步较早,相对大坝安全信息系统的网络技术开发及其应用研究比较成熟。从20世纪60年代即开始从事监测自动化的研究,20世纪70年代就已进入了实用阶段。早期的自动化系统都是集中式数据采集系统,20世纪80年代初期,一些国家研制了分布式数据采集系统,实现了大坝安全监测自动化。事实上这些年来,国内许多高等院校和科研部门如天津大学、武汉大学、南京自动化研究院、河海大学、国家电力公司、中国水利科学研究院等投入大量的人力进行有关大坝监测信息管理和分析系统的研究,结合大坝观测数据分析,开发了有关大坝安全监测分析与数据管理的软件。为此,本文设计了一种大坝可视化显示系统,以支撑大坝安全监控[1][2]。
1 业务流程与主要功能模块
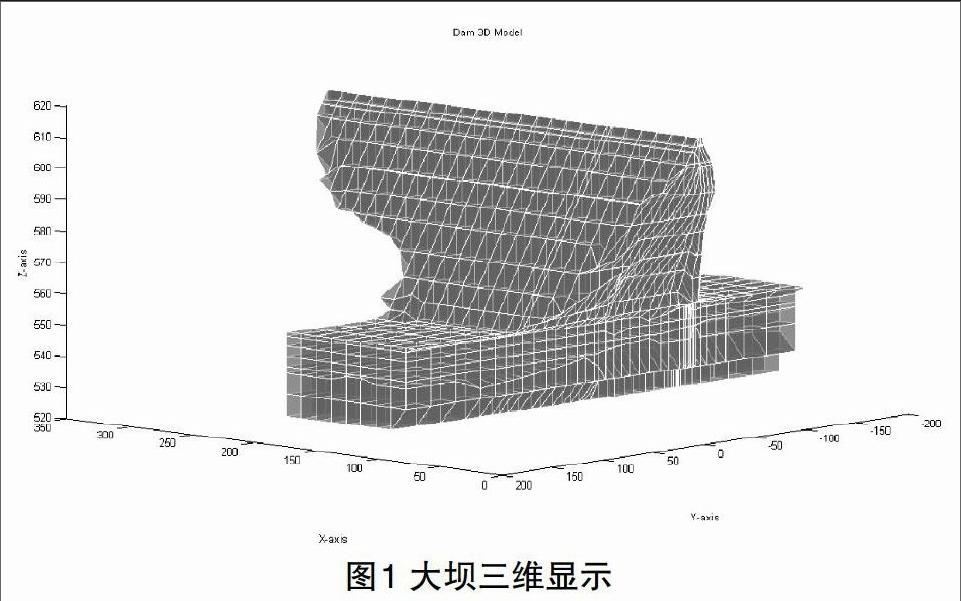
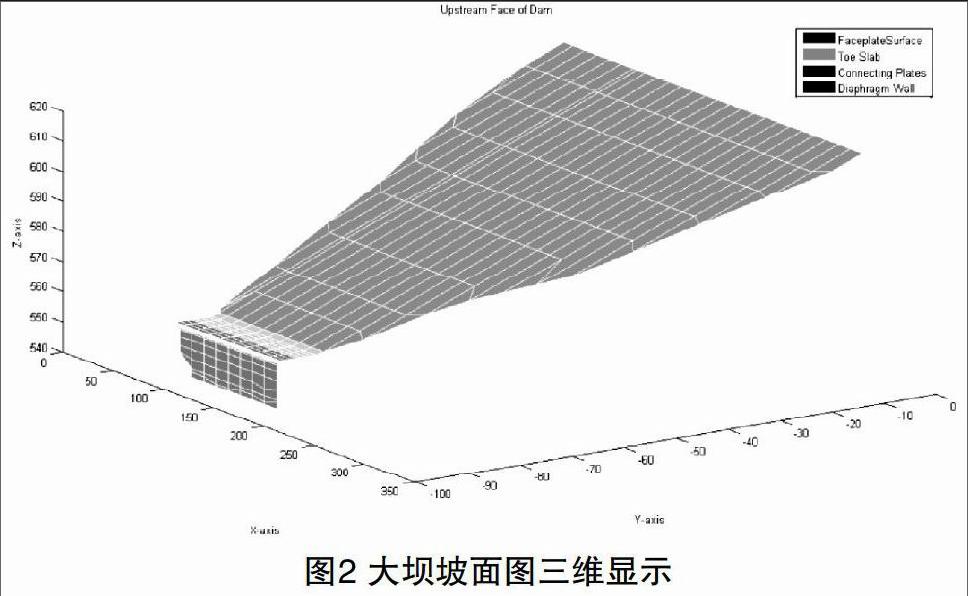
系统业务流程主要分为三个阶段: (1)基础数据可视化;(2)静力数据可视化;(3)动力数据可视化,其中基础数据可视化主要任务为对基础数据进行有效处理,静力数据可视化主要任务是对静力数据处理,为静力数据分析做准备,动力数据可视化的主要任务是对动力数据处理,以分析大坝的动应力应变。3维显示效果举例见图1与图2。
基础数据可视化主要包括如下模块:(1)3D显示预处理,以提取有效的节点坐标数据、组装单元数据,单元材料号,服务三维显示;(2)3D着色建模与显示,为大坝的3D显示,提取对应的材料号颜色,生成场景数据,实现数据显示的功能,包括放大、缩小、旋转。在本系统中,为了更形象化的显示大坝各个部分的材料,对五种材料分别用了五种不同的颜色,这样就能够直观的看清大坝的材料组成。依据材料号着色主要功能是对提取的材料号进行区分,并根据对应的材料号的颜色对大坝的三维图进行着色。
静力数据可视化主要包括如下模块:(1)静应力应变预处理,以有效提高数据提取的质量。主要功能为提取x,y,z,3个方向的变形数据,提取x,y,z方向以及最大应力、最小应力水平相关数据,计算迎水面应力数据。其次,根据某一顺河向或坝轴向坐标,切割三维大坝, 生成相应的二维图形,并动态显示切割面位于三维大坝的位置;(2)静力剖面切割及显示,主要功能为剖面离散数据的网格化,离散数据边界提取,有效的插值算法,绘制等值线,根据所选的轴线显示出大坝该面的受力等高图。
动力数据可视化主要包括如下模块:(1)动应力应变预处理,主要功能为提取x,y,z,3个方向的变形数据,提取x,y,z方向以及最大应力、最小应力水平相关数据,计算迎水面应力数据。根据输入数据,动态显示各节点的受力数据,显示为3D的加速度图;(2)动力剖面切割及显示,主要功能为剖面离散数据的网格化,离散数据边界提取,有效的插值算法,绘制等值线,根据数据动态显示大坝各节点的位移图。
2 结语
本文在研究大坝三维快速显示算法的基础上,针对大坝不同部分的材质,以彩色形式显示大坝整体三维视图;根据模拟得到的地震后大坝位移数据,动态显示大坝在地震后的三维视图;给出大坝某一切面的立体视图;将上述功能集成完成显示系统。针对水利大坝三维数据,利用matlab实现大坝三维场景显示, 效果逼真,功能强,运行性能稳定,为水库运行管理部门及上级主管部门的科学决策提供科学、直观、高效的可视化辅助支持[3][4][5]。
参考文献
[1]朱广堂.基于GIS的工程施工管理实时可视化技术研究[D].华中科技大学,2005:1-178.
[2]张海平.基于GIS的水电站施工进度三维可视化模拟[D].大连理工大学硕士学位论文, 2006:1-57.
[3]何小梅.基于OpenGL的三維边坡稳定分析可视化软件研究[J]. 湖业水利水电职业技术学院学报, 2007.3(2):30-35.
[4]K. A. bdel-Malek and H. J. Yeh, Analytical boundary of the workspace for general three degree-of-freedom mechanisms. International Journal of Robotics Research,1997,16(2):198-213.
[5]MCeccarelli and AVinciguerra. On the workspace of general 4 R manipulators. International Journal of Robotics Research,1995,14(2):152-160.endprint
