基于Arduino的智能避障小车的设计
2017-09-07荣华良杨路
荣华良+杨路
摘要:智能作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。本设计超声波作为智能小车避障的一种重要手段,以其避障实现方便,计算简单,易于做到实时控制,测量精度也能达到实用的要求。
关键词:Arduino;超声波;智能避障
中图分类号:TP212 文献标识码:A 文章编号:1007-9416(2017)05-0172-01
Design of Intelligent Obstacle Avoidance car Based on Arduino
Rong Hualiang,Yang Lu
(Xuchang Vocational Technical College, Xuchang Henan 461000)
Abstract:smart as a new product of modern society, is the future development direction, he can follow the pattern set in advance in a specific environment where automatic operation, without human management, it can achieve the expected or higher goal. As an important means of avoiding the obstacle of intelligent car, the design of ultrasonic wave is convenient to realize obstacle avoidance, simple calculation, easy to achieve real-time control, and the measurement accuracy can also meet the practical requirements.
Key Words:Arduino; ultrasonic; intelligent obstacle avoidance
1 设计方案和要求
1.1 设计要求
超声波智能避障小车能够自己计算出障碍物的距离,当到达设定距离时,该小车会停止行走,然后会自动转向再选择合适的路径行走,无需人为去进行控制。使用时只需把电源开关打开即可,小车行走过程中,可自动转向躲避障碍物,寻找合适的路径[1]。
1.2 工作原理
超声波智能小车是一款全智能的自动摇头避障小车,该车通过Arduino板写入程序,然后通过L298N驱动器驱动直流马达的正反转来控制小车的方向,在小车行走的过程中如果前方有障碍物,则小车会立即停止,然后再通过超声波模块和舵机来寻找最佳路径,通过舵机旋转来使超声波测量其前方,左面及右面的距离,以实现自动躲避障碍物[2]。
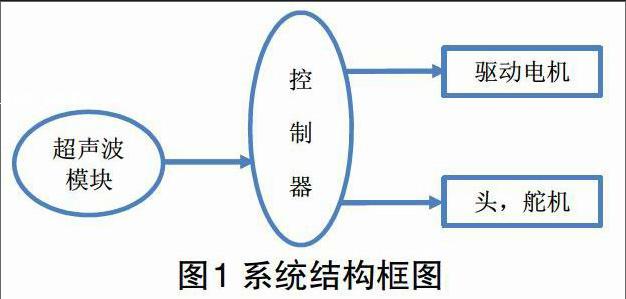
1.3 结构框图
本作品系统结构框图1如所示。
2 主要功能模块
2.1 Arduino功能模块
可以用来进行编程对其它元器件进行控制。Arduino Leonardo是基于ATmega32u4一个微控制器板。它包含了支持微控制器所需的一切,你可以简单地通过把它连接到计算机的USB接口,或者使用AC-DC适配器,再或者用电池来驱动它。
2.2 HC-SR04超声波模块
HC-SR04超声波测距模块性能稳定,测度距离精确。采用本模块主要进行距离计算,测量和进行判断等功能。可提供2cm-400cm的非接触式距离感测功能, 测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路[3]。
2.3 舵机
此舵机为SG90,本车用的为180度舵机。
2.4 L298n驱动模块
L298N驱动芯片驱动该智能小车的两个直流马达。
3 结语
因小车的智能避障作用,有很大的发展前景。我国作为一个世界大国,在高科技领域也必须占据一席之地,未来汽车的智能化是汽车产业发展必然的,在这种情况下研究超声波在智能车避障上的应用具有深远意义,在未来汽車智能化进程中必将得到广泛应用。同时小车可以作为玩具的发展对象,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。
参考文献
[1]戈惠梅,徐晓慧,顾志华,张金龙.基于Arduino的智能小车避障系统的设计[J].现代电子技术,2014(11):118-120.
[2]孙建朋.基于Arduino的智能小车避障系统设计[J].黑龙江科技信息,2016(15):191.
[3]赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013(5):1-4.endprint
