一种基于物联网的摩托车报警器设计
2017-09-06舒景东
舒景东 刘 龙
(武汉大学电气工程学院,湖北 武汉 430072)
一种基于物联网的摩托车报警器设计
舒景东 刘 龙
(武汉大学电气工程学院,湖北 武汉 430072)
本文主要设计了一种以超低功耗单片机MSP430G2855为控制芯片的摩托车报警器,通过云服务器、手机APP和报警器中的GPRS模块构建物联网。振动传感器和超声波传感器协同工作,振动传感器未检测到信号时,超声波传感器不工作,降低了功耗,同时,超声波传感器用于判别是否有人靠近,降低了误报的概率。基于物联网,用户通过手机APP可实现对于误报情况的处理,以及对于被盗摩托车的追踪。
摩托车;报警器;物联网;MSP430G2855;GPRS
1 引言
摩托车与汽车相比,安全性和防盗性都不及汽车,目前摩托车报警器存在的一些问题是:一些摩托车报警器只采用振动传感器且灵敏度高,有误报警现象,且当用户听不到报警声时,无法解除报警,导致噪声扰民;另外一些报警器无定位功能,导致用户无法追踪被盗的摩托车;还有一些报警器只采用摩托车蓄电池供电,在电线被窃贼剪断后,报警器失去供电,无法继续工作。本文提出的基于物联网的摩托车报警器误报警率低,具有定位功能,供电工作可靠。
2 总体设计
基于物联网的摩托车防盗报警器,包括电源模块、控制模块、无线通信模块、报警模块、定位模块、振动传感器和超声波传感器。电源模块为整个系统供电,且在正常工作时使用摩托车蓄电池供电,一旦检测到连接蓄电池的线路毁坏,启动备用电池。无线通信模块、报警模块、定位模块、振动传感器和超声波传感器都连接到控制模块。报警器通过无线通信模块与云端服务器建立联系,云端服务器通过互联网与用户手机APP建立联系。报警器结构图如图1所示。

图1 报警器结构示意图
3 主要硬件设计
3.1 控制模块
控制模块用于处理振动传感器和超声波传感器采集到的数据,同时控制无线通信模块、报警模块和定位模块。目前智能电子设备中常用的控制器为单片机,而MSP430单片机相比Arduino单片机使用更为灵活,开发文档资料丰富,外围电路较为简单,可提高开发速度[1]。本设计采用MSP430G2855,属于RISC体系,支持的时钟模式主要有:高达16MHz的内部时钟,内部超低功率低频振荡器(LF),32kHz晶振,16MHz的高频晶振,外部数字时钟源;还具有两个16位TimerA定时器,一个16位Timer B定时器,支持自动波特率检测的UART、SPI通信,具有一个10位200ksps的片内AD。
3.2 无线通信模块
由于需要报警器和用户手机建立联系,可以采用的方式有GPRS和Wi-Fi通信,但是摩托车摆放的地方不一定总有Wi-Fi覆盖,所以本设计无线通信模块采用GPRS通信方式[2]。采用的GPRS模块为USR-GM3,提供UART接口和单片机进行通信,具有AT指令模式、HTTPD Client、网络透传模式和短信透传模式这4种工作模式,其串口提供硬件流控(RTS/CTS)的支持,波特率最高达921600bps,还可以动态改变串口波特率,并且可进入低功耗模式,使用AT指令,通过外部GPIO和电话短信等唤醒。此GPRS模块还可以接入透传云,透传云支持部署到私有服务器,可配置为本报警器所需云端服务器。
3.3 报警模块
报警模块采用Contek TDA2030A高保真音频放大器,RL为功率4W的扬声器,Vs连接到摩托车电瓶,Vi为控制器传输过来的音频信号。报警模块可以播放用户从手机APP输入的语音,芯片外围电路图如图2所示。
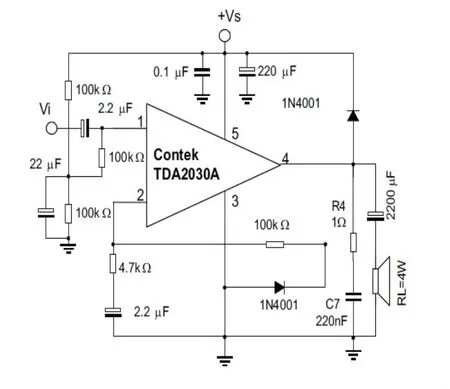
图2 报警模块电路图
3.4 定位模块
目前有四大定位系统:GPS,北斗,GLONASS,Galileo,目前在我国北斗系统比GPS定位精度更高[3],但是由于北斗正在建设中,北斗协同GPS定位具有更高的定位精度[4],本设计定位模块采用的导航模块为UM220-III NL,为BDS/GPS双模定位模块,结合了GPS和北斗定位的优势,开阔场地定位精度为2.5 m CEP,测速精度为0.1m/s,具有两个UART串口,一个为主串口,默认波特率为9600kbps,支持数据传输和固件升级,另外一个串口仅支持数据传输,整个模块功耗较低,典型值为120mW。
3.5 振动传感器
振动传感器采用MVS0608.02,为全指向式的振动传感器,传感器中微形小球连接两个金属触点,感受到振动时,传感器中的微球移动,传感器开始工作,从平时的高阻状态变为低阻状态,而无振动时,传感器电阻高于30兆欧,几乎无电流流过,功耗可忽略不计,且工作时电流也低至0.2μA,功耗极小;传感器供电电压范围广,从1.8V到15V均可使其工作,其导通电阻小于100欧姆。
3.6 超声波传感器
超声波传感器有两个测距模块,分别安装在摩托车两侧。本设计采用HC-SR04超声波模块,测距精度可以达到3mm,模块由超声波发射器、接收器、控制电路组成,一个IO口用于触发测距,如果接收器接收到返回的超声波信号,则另外一个IO口输出高电平,其持续时间为超声波发射到传
4 物联网的构建及报警器工作过程
如图3所示,报警器通过无线通信模块的GPRS通信方式与云端服务器相互传递信息,云端服务器与用户手机APP间通过互联网传递信息,比如手机可以使用数据流量或者Wi-Fi的方式与云端服务器通信[6]。

图3 系统框图
摩托车停车,用户上锁后,控制模块启动一次超声波模块,获取车辆两侧障碍物距离信息,然后关闭超声波传感器,启用振动传感器。当振动传感器采集到摩托车车体振动信号后发送给控制模块,控制模块启动超声波模块检测车辆两侧的障碍物距离,若发现障碍物距离小于停车后首次测量的障碍物距离,则启动报警模块和定位模块,同时通过无线通信模块将报警信息和摩托车位置信息传递到云端服务器,进而传递到用户手机APP,如果发现障碍物距离和首次测量的一致,则不发出报警信号。用户可通过手机APP输入语音并在报警模块播放出来,若用户判断报警器是误报警,还可通过手机APP发送关闭报警模块的指令,经过云端服务器,再经过报警器的无线通信模块到达控制模块,从而使报警模块停止工作。
5 结语
本文论述的基于物联网的摩托车报警器,以MSP430单片机为控制芯片的控制模块通过振动传感器和超声波传感器采集到的数据判断是否需要报警,超声波传感器仅在停车后启动一次,再次启动将由振动传感器的信号触发,实现了超声波传感器的低功耗。同时用户可通过手机APP关闭报警模块,减少了误报警的概率。用户可通过APP喊话,语音数据传输到报警器通过报警模块播放出来,增强了对窃贼的威慑。用户还可通过定位模块实现对摩托车的追踪,提升了防盗效果。
[1]陈秘,许凯华,刘玉华,等.基于MSP430F149的车载监控终端系统设计与实现[J].计算机工程与设计,2008(17):4398-4400.
[2]赵继春.基于GPRS无线智能家居安防系统的研究与实现[D].邯郸:河北工程大学,2007.
[3]施闯,赵齐乐,李敏,等.北斗卫星导航系统的精密定轨与定位研究[J].中国科学:地球科学,2012(06):854-861.
[4]吴甜甜,张云,刘永明,等.北斗/GPS组合定位方法[J].遥感学报,2014(05):1087-1097.
[5]陈疆.基于超声波传感器的障碍物判别系统研究[D].咸阳:西北农林科技大学,2005.
[6]陈兴龙,陶士庆,孙静,等.基于APP技术的物联网监控技术的研究现状与应用[J].机械工程师,2015(12):77-78.
【 Abstract】 This paper mainly discusses on the design of the motorcycle alarm with an ultra-low power single-chip MSP430G2855 for the control chip.The Internet of things is built through cloud server,mobile phone APP,and the GPRS module of alarm.With cooperative work of vibration sensor and ultrasonic sensor,the ultrasonic sensor doesn’t work to reduce power consumption if the vibration sensor detects no signal.At the same time,ultrasonic sensor is used to distinguish whether someone is approaching,reducing the probability of false alarm.Based on the Internet of things,users can handle false alarm signal through mobile phoneAPP and track stolen motorcycles.
Design of the MotorcycleAlarm Based on the Internet of Things
Shu Jingdong Liu Long
(School of Electrical Engineering,Wuhan University,Wuhan 430072,Hubei)
motorcycle;alarm;Internet of Things;MSP430G2855;GPRS
TP277
A
1008-6609(2017)07-0066-03
舒景东(1996-),男,湖南怀化人,本科在读,研究方向为物联网。
