GPS信号捕获跟踪算法研究与验证
2017-09-04瞿洋,李豹,王丛侠
GPS信号捕获跟踪算法研究与验证
瞿洋1李豹2王丛侠1
(1.南海舰队湛江524000)(2.海军工程大学导航工程系武汉430033)
GPS信号的捕获与跟踪是软件接收机的重要环节。研究了GPS信号的并行码相位搜索捕获算法和基于延迟锁相环(DLL)和科斯塔斯(Costas)锁相环两个环路的跟踪算法,通过信号采样器采集实际GPS信号,利用下变频得到的中频信号对捕获跟踪算法进行了验证,结果表明该算法能够有效地捕获跟踪实际GPS信号。
GPS软件接收机;并行码相位搜索;捕获;跟踪
Class NumberTN966.4
1 引言
随着我国北斗二号卫星的陆续发射,目前全球卫星导航领域已包含美国的GPS、俄罗斯的GLONASS、欧洲的GALILEO、中国的北斗四大卫星导航系统。接收机终端技术是卫星导航领域的一个重要研究方向,软件接收机由于其灵活、可扩展、经济的优点成为当前的研究热点[1-4]。GPS软件接收机主要由射频前端(RF)、用于数字处理的软件平台(计算机或DSP)组成。本文对GPS信号的捕获跟踪算法进行了研究并在PC端Matlab环境下用射频端输出的中频信号对算法进行了验证,其思想可用于其他卫星导航软件接收机的设计。
2 GPS信号结构与捕获跟踪算法
2.1 GPS信号结构
GPS卫星信号包含三种信号分量,即载波、测距码(C/A码和P码)和导航电文。其载波有频率为1575.42 MHz和1227.60 MHz的L1和L2两种。在载波L1上,调制有C/A码、P码两种测距码,而载波L2上,只调制含P码,调制方式采用BPSK调制。载波L1可表示如下[5~7]:
SL1(t)为L1频段的信号,Ap为P码幅度,Pi(t)为±1状态的P码,Di(t)为±1状态的数据码Ac为C/A码幅度,Ci(t)为±1状态的C/A码,ω1为载波L1角频率,ϕ1为载波L1的初始相角。本文仅研究L1频段的C/A码捕获跟踪和导航电文解调。
C/A码是码速率为1.023MHz的二相调制信号,整个码周期包括1023个码元,持续1ms。它属于伪随机噪声码(PRN)序列,由两个1023位的PRN序列G1和G2产生,其发生器如图1所示。不同的卫星使用不同的C/A码,C/A码具有高自相关和低互相关的特性,这是GPS信号特别是弱信号的检测的基础。
2.2 GPS信号捕获算法
捕获是为了获得粗略的C/A码初始相位和载波频率。C/A码周期为1ms,要捕获GPS信号,至少需要1ms数据。数据长度越长(最长10ms),捕获结果的信噪比越好,载频也越精确,但所耗时间也越长。本文采用1ms长度的数据进行捕获,如果在这1ms中有GPS导航电文导致相位反转无法正确捕获,则采用下一个1ms的数据,在12MHz的采样率下,1ms数据有12000个点,可将C/A码的初始位置精确到1/12MHz/(1/1.023MHz)=0.08525个码元。同时由于多普勒频移的影响,载频在4.309MHz的中心频率±10KHz范围内,仿真时,以1KHz为间隔,将得到21个频率点。GPS信号的捕获就是这样一个码相位和频率二维搜索的过程。
常用捕获算法有串行搜索查询算法、并行频率空间搜索算法和并行码相位搜索算法[8~9]。并行码相位搜索算法是在码相位上并行计算,而在频率上进行搜索,将二维搜索过程变为频率的一维搜索,速度快、计算量小,本文将讨论这种算法。并行码相位搜索算法的原理如下:
长度为N的有限长序列x(n)的离散傅立叶变换为
两个长度为N的有限长序列x(n)与y(n)的互相关函数为
联立式(2)、(3)得x(n)与y(n)的互相关函数的离散傅立叶变换为
利用式(5)可以较快地搜索到GPS输入信号和本地信号之间的相关关系,进而找到C/A码的起始位置和多普勒频率初始值。这种方法不需要逐次移位,只需要对21个频率的本地码分别进行2次FFT,1次逐点相乘和一次IFFT即可实现,极大减少了运算量,缩短了搜索时间,其实现如图2所示。这样得到的载频分辨率为1KHz,如要得到更精细的分辨率(如100Hz),以第一次捕获的频率为中心频率,以100Hz为间隔取一系列点覆盖分辨率范围,利用串行搜索即可(因为码相位已知),此时相关值的信噪比较低,应选择更长时间的数据(10ms)累加处理。
式中X*(k)表示X(k)的共轭。Z(k)的幅值可表示为
2.3 GPS信号跟踪算法
跟踪利用捕获得到的粗略码相位和载波多普勒频移实现本地信号与输入信号的准确同步,提取出导航电文。跟踪输入信号需要两个环路:延迟锁定环(DLL)用来跟踪C/A码,又称码环;锁相环(PLL)用来跟踪输入信号的相位,也称载波环,图3融合了两个环路的算法。
码环是为了获得C/A码的精确初始位置,从中提取伪距信息。我们知道,C/A码的相关峰值是1023,如果C/A码偏移大于一个码元,相关值就有3个:63,-1,-65。如果两个信号相离大于一个码元就简单地假定相关值为0[10]。图4给出了一个码元内的相关示意图。本地产生的超前(E)、即时(P)和滞后(L)三路信号,分别相差半个码元(d=0.5),这三路信号分别与去除了载波的输入信号进行相关得到三个相关值ye,yp,yl。假设yp相距理想峰值为x,即为C/A码的初始位置。x计算方法[10]如下:
式中,x和d的单位是码元,最后要乘以码元的时间977.5ns。实际运算中,存在I、Q两个支路,将式(6)替换为
选择半个采样周期(0.5/12MHz)为x的阈值,由式(8)可求出对应r的阈值,r即为码环的鉴别器。考虑到噪声和C/A码多普勒频移因素,r值10ms平均后更新一次,这样C/A码的初始位置每10ms输出一次,精度为1/12MHz=83.33ns。
载波环用来跟踪输入信号的载波相位达到去除载波的目的,由数控振荡器(NCO)、载波环滤波器和鉴别器组成。由于导航电文的影响,载波环采用对相位跳变不敏感的科斯塔斯环,环路鉴别器选择对相位反转不敏感的反正切鉴别器[10]。公式如下:
数控振荡器表达式为
整个锁相环的传输方程为
环路滤波器的传输方程为
其中:式中,k0k1为环路增益;ωn为环路自然频率;ζ为阻尼系数;ts为采样时间。
由文献[10],设定ζ为0.707,噪声带宽为20Hz,k0k1为400π可实现载波环的跟踪。载波环每毫秒输出一次,其I路输出即为解调得到的导航电文,Q路为噪声。
3 算法验证
为验证所提出的算法,利用GPS信号采样器(如图5)采集实际GPS数据并存盘,然后在计算机上Matlab环境下进行数据处理。采样器采样频率为12MHz,输出为2bit的数字量化信号。
将GPS信号采样器调试完毕后,放置于某大楼楼顶,静态采集一段时间GPS信号并存盘。在PC机上进行算法验证,捕获的结果如表1所示。
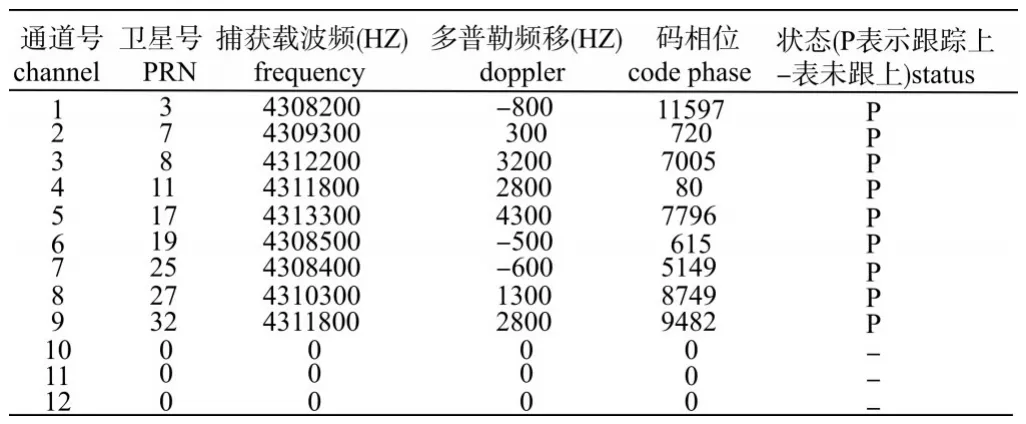
表1 GPS信号捕获结果
选择通道7(PRN25)的卫星,其捕获的码相位、多普勒频移点结果如图6所示,可以看到,在捕获位置,相关值比非捕获位置大很多。
把捕获得到的码相位与多普勒频移结果输入到跟踪环路,得到I、Q路超前、即时、滞后三路信号输出如图7所示,其中I路的即时码即为载波环输出的导航电文信息,由于其与输入码对位最准确,因而相关值最高。Q路与I路正交,其输出为噪声。
4 结语
本文基于射频前端的数字中频数据验证了GPS信号的捕获和跟踪算法。并行码相位搜索捕获算法以FFT求相关原理为基础,将二维搜索变为一维搜索,计算量小、速度快。跟踪由载波科斯塔斯环和码延迟锁相环实现,载波环配合码环工作,码环每10ms输出一次C/A码初始位置,载波环输出即时的导航电文。验证结果表明,该算法能有效的捕获跟踪GPS信号,输出导航电文。
[1]宋玉龙,廉保旺,宋佳驹.BDS/GPS双系统软件接收机实现与性能分析[J].西北工业大学学报,2016,(04):656-662.
[2]沈思远.GPS中频信号的生成与接收技术研究[D].上海:华东师范大学,2014.
[3]李豹,曹可劲,马建国.GPS软件接收机跟踪环路设计[J].电子设计工程,2010,18(2):4-6.
[4]Dinesh Manandhar.Development of L1-Band C/A Code Software-based GPS Receiver[R].The University of Tokyo,2002.
[5]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003:125-295.
[6]刘基余.GPS信号接收机的基本性能检验[J].导航,1996,32(4):80-85.
[7]魏子卿,葛茂荣.GPS相对定位的数学模型[M].北京:测绘出版社.1998:22-41.
[8]唐康华,吴美平,胡小平.基于射频前端的GPS软件接收机设计与验证[J].中国惯性技术学报,2007,15(1):51-54.
[9]Nicolaj Bertelsen,Kai Borre,Peter Rinder.The GPS code software receiver at Aalborg University[R].Danish GPS Center,Aalborg University,2004.
[10]James Bao-Yen Tsui.Fundamentals of global position⁃ing system receivers:a software approach[M].New York:John Wiley&Sons Inc.,2005:129-223.
Research and Validation of Acquisition and Tracking Algorithms for GPS Signal
QU Yang1LI Bao2WANG Congxia1
(1.South Sea Fleet,Zhanjiang524000)(2.Department of Navigation Engineering,Naval University of Engineering,Wuhan430033)
The acquisition and tracking of GPS signal are two important section of GPS software receiver.This paper studies the acqusition and tracking algorithms of GPS signal,in which Parallel code phase search acquisition and tracking algorithms based on DLL and Costas phase lock loop are implemented,then validates the acqusition and tracking algorithms with digitized intermedi⁃ate frequency signal from GPS signal sampler.The result proves that the algorithms can acquisite and track the real GPS signal effi⁃ciently.
GPS software receiver,Parallel code phase search,acquisition,tracking
TN966.4
10.3969/j.issn.1672-9730.2017.08.010
2017年2月3日,
2017年3月18日
瞿洋,男,硕士,工程师,研究方向:多源情报融合。李豹,男,博士,讲师,研究方向:GPS软件接收机。王丛侠,男,硕士,工程师,研究方向:AIS系统综合。