基于ARM的风力摆实验平台的研究与应用
2017-09-03叶晓涵隋竹翠
夏 彤,叶晓涵,胡 婷,隋竹翠
(武汉大学 电子信息学院,湖北 武汉 430072)
基于ARM的风力摆实验平台的研究与应用
夏 彤,叶晓涵,胡 婷,隋竹翠
(武汉大学 电子信息学院,湖北 武汉 430072)
以大学生自主创新与电子设计为背景,该文介绍了基于ARM的风力摆实验平台的研究与应用。平台整合了风力摆系统上所需的所有电路模块和实验装置,包括单片机、轴流风机驱动模块、姿态测量模块、电源模块、人机交互模块及悬挂轴风力摆所需的支架;提供了控制风力摆做不同轨迹运动的算法和CCS开发平台上的配套代码,可供学生参考和学习使用。实验结果表明,该实验平台可实现通过按键操作控制风力摆完成不同轨迹的运动,且实验现象明显。
大学生自主创新与电子设计;实验平台;实验教学;风力摆
大学生自主创新与电子设计综合了电子信息类所必修的数字电路技术、模拟电路技术、电路分析技术、自动控制原理、微处理器设计与应用、传感器等多门课程的知识,对学生的理论知识和动手能力有着较高的要求,可引导学生注重创新能力、动手能力和协作精神的培养,加强学生工程实践素质的训练,提高学生针对实际问题进行电子设计、制作的综合能力[1]。
本文设计了一款基于ARM 的功能完善、方便调试的风力摆实验平台。该平台整合了风力摆系统上所需的所有电路模块和实验装置,包括单片机最小系统、轴流风机驱动模块、姿态测量模块、电源模块、人机交互模块及悬挂轴风力摆所需的支架。同时提供控制风力摆做不同轨迹运动的算法和CCS开发平台上的配套代码,可供学生参考和学习使用。该平台是大学生自主创新与设计的有效实践,且具有极强的可拓展性,可激发学生进一步创新应用。
1 风力摆控制系统简介
将一长约 60 cm~70 cm 的碳素纤维细管上端用万向节固定在支架上,下方悬挂一组4只轴流风机,构成一风力摆,如图1所示。风力摆上安装一向下的激光笔,静止时,激光笔的下端距地面不超过20 cm。设计一测控系统,控制驱动各风机使风力摆按照一定规律运动,激光笔在地面画出相应的轨迹。
4台额定电压12 V,额定功率36 W的轴流风机分别安装在图1所示的轴流风机支架的4个侧面上,形成4个正交方向的驱动力,通过控制4个轴流风机的风量来控制4个方向的驱动力大小,从而使整个摆运动,激光笔在地面的轨迹测试图上画出不同的轨迹,如图1的虚线所示。

图1 风力摆结构示意图
2 风力摆实验平台设计
整个风力摆实验平台由图1所示的支架实验装置和控制所需的电路模块组成,系统框图如图2所示。电源模块为单片机和驱动供电,单片机输出PWM波经驱动后控制风力摆,风力摆的姿态同时通过传感器反馈给单片机。
2.1 电路模块总体设计
风力摆实验平台的硬件电路部分组成图如图3所示。三轴陀螺仪和加速度传感器安装在图1所示的碳素纤维管上。所选用的轴流风机内置有编码器。系统的硬件连接原理图如图4所示。

图2 系统框图
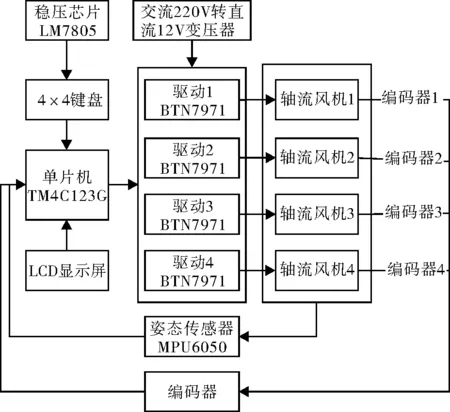
图3 硬件电路框图

图4 系统原理图
2.2 单片机
MCU选用德州仪器生产的TM4C123G LaunchPad 开发板,该板是基ARM© CortexTM-M4F 微控制器的Tiva C系列开发平台[8]。作为ARM系列的MCU,TM4C123G具有较强的信号运算处理能力,具有扩展的单周期乘法累加指令、优化的单指令多数据运算和单精度浮点运算指令;另外,支持用于高级运动控制的PWM(pulse width modulation)和QEI(quadrature encoder interface)功能[9],并提供相应的API函数。
2.3 驱动模块设计
采用BTN7971模块作为风机的驱动,驱动模块采用双BTN7971大电流(68A)H桥驱动[10],并用74LS244做与单片机之间的隔离,可有效保护单片机,可输出两路PWM波。电路原理图[11]如图5所示。
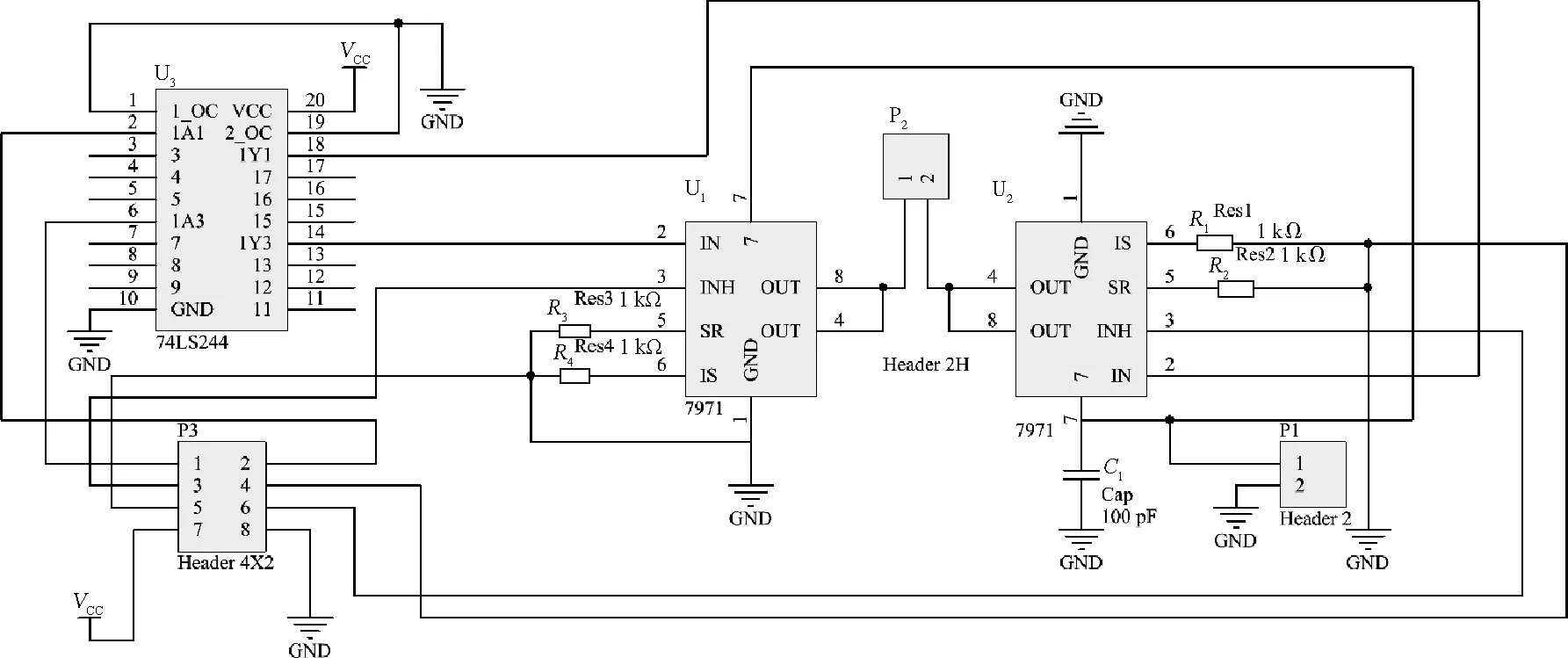
图5 BTN7971驱动模块
2.4 传感器模块设计
传感器选用三轴加速度计和陀螺仪集成芯片MPU-6050。其角速度全格感测范围为±250、±500、±1 000与±2 000 °/sec(dps),可准确追踪快速与慢速动作,并且可程式控制的加速器全格感测范围为±2 g、±4 g、±8 g与±16 g,灵敏度高[12]。电路原理图如图7所示。为减小由安装带来的角度误差,先将MPU6050芯片固定在L型直角架的一边上,再将L型直角架另一边固定在碳素纤维管靠近万向节的一段,使MPU6050芯片Z轴与碳素纤维管保持平行,原理图如图6所示。

图6 MPU6050模块
2.5 电源模块设计
考虑到驱动所需电流大,功率高,处于安全和稳定考虑,本系统采用双电源供电[13]。
考虑到4台轴流风机同时工作时电流可达十几安,所以用对除单片机以外的模块均采用开关电源供电;选用SE-600-12即可保证提供足够大的功率。
另外,采用12 V锂电池稳压后给单片机供电,采用LM7805芯片作为稳压芯片为单片机供电[14]。
3 程序设计
3.1 算法
3.1.1 起摆算法
当风力摆在既定平面内做小角度摆动时,可近似为单摆运动,运动的周期为:
(1)
式中,L为摆长,摆杆一定时,单摆周期可计算得到,可得风力摆的近似周期[15]。
本系统采用4个36 V的直流轴流风机为动力,装置有一定的质量,在风机风速有限的情况下,需要采用更合适的驱动方法。由共振效应可知,风机自身的驱动频率与单摆运动频率相同时,振动振幅可达到最大。经实验表明,给轴流风机提供占空以单摆周期为周期且按正弦变化的PWM波时系统共振,响应最快,摆动幅度最大。
3.1.2 摆杆姿态的解算
摆杆与竖直方向的倾角为θ,摆杆在地面的投影与相对零度的夹角为φ,如图7所示。MPU6050的Z轴与沿摆杆平行,X轴和Y轴垂直于飞杆,输出的加速度aX,aY,aZ可演算出θ、φ;
X轴与水平面夹角为:

(2)
Y轴与水平面夹角为:
(3)
则可得:

(4)
再通过卡尔曼滤波,得到校正值[16]。
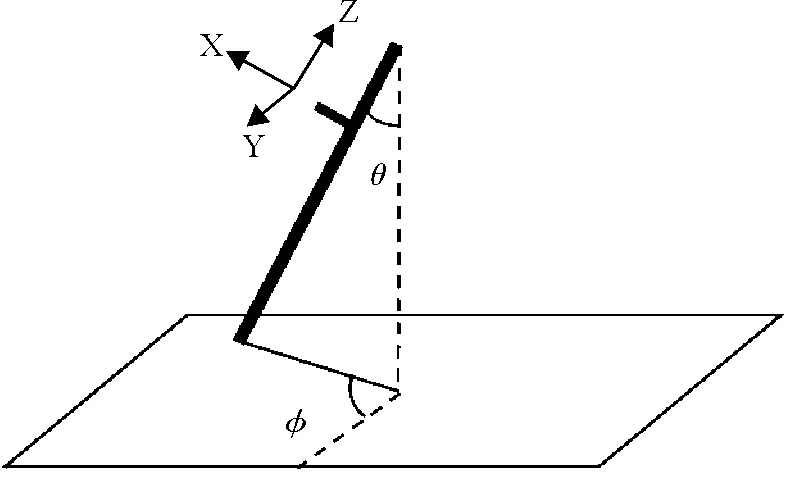
图7 摆杆姿态示意图
3.1.3 轨迹算法
建立如图8所示坐标系,方块所代表的4个轴流风机分别位于X轴正半轴、X轴负半轴、Y轴正半轴和Y轴负半轴。可应用运动的合成与分解法则来控制风力摆做不同轨迹的运动。如振幅相同、相位差为90°的两个正交方向的正弦运动的和运动为圆周运动。假设提供给风机的是占空比按正弦变化的PWM波,位于轴流风机1和3的PWM波占空比相位相反,同样轴流风机2和4的PWM波占空比相位也相反,而轴流风机1和2、3和4的PWM波占空比相位差为90°,此时和运动应为近似圆周运动。虽然风机受空气的反作用力的大小与PWM波占空比不是简单的线性关系,但可利用风机转速经过PID控制器[17]来控制占空比,使运动轨迹趋近目标轨迹。
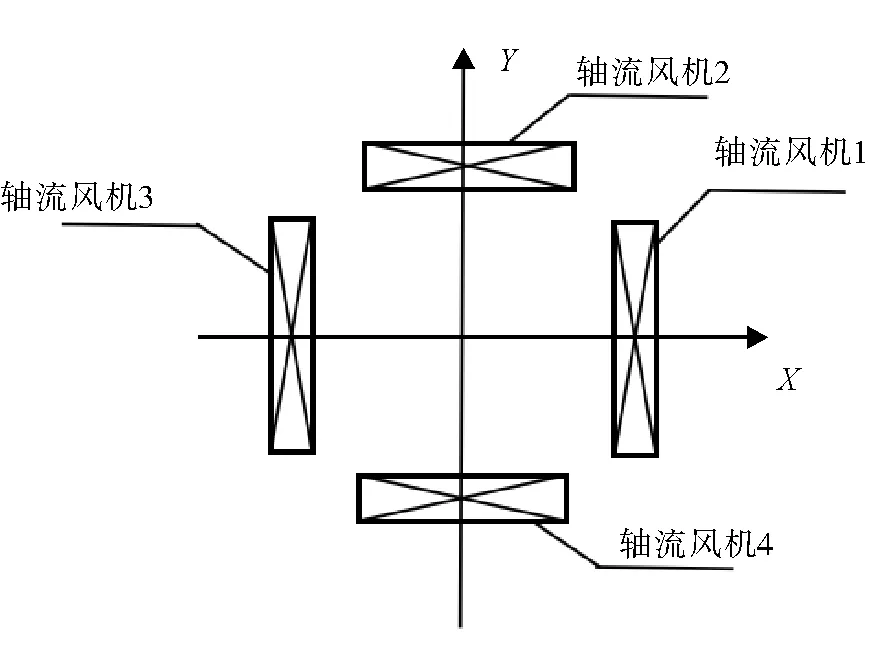
图8 坐标系俯视图
3.2 程序流程图
程序流程图如图9所示。按键是4×4无源矩阵键盘,采用线反转法进行扫描[21],控制模式切换。选择模式后,根据事先拟合好的对应于指定轨迹的PWM波占空比对4个轴流风机进行控制,同时利用MPU6050反馈的摆杆角度及轴流风机的编码器反馈的转速对占空比进行实时修正,直到风力摆能稳定地画出指定轨迹。
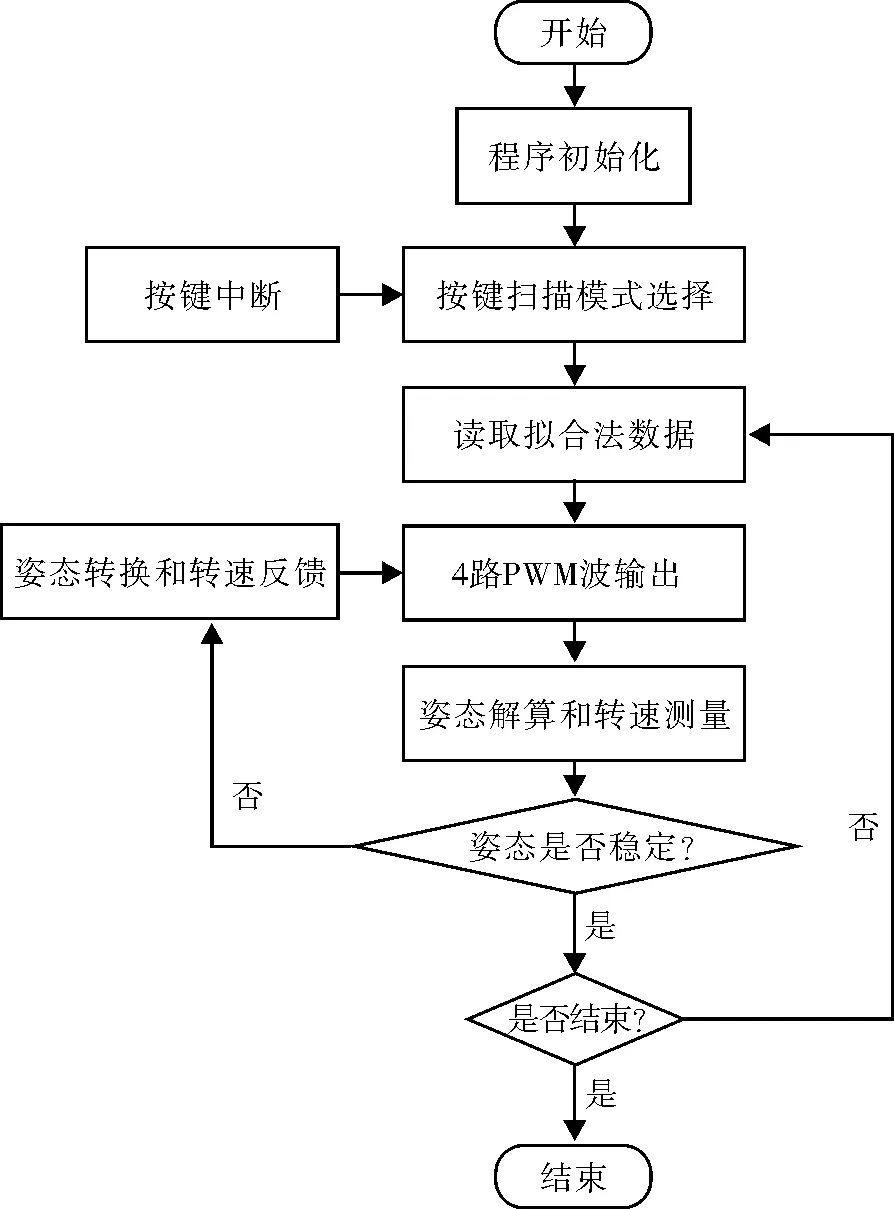
图9 程序流程图
不同模式下的运动轨迹不同,对应的程序复杂度不同,用到的算法也不相同,可供不同程度的学生参考学习,更加鼓励学有余力的学生自行拓展出新的模式,培养学生的应用能力。
4 实验测试结果和分析
风力摆起摆后,位于摆杆底端的激光笔可在平铺于风力摆正下方的轨迹测试图上画出运动轨迹,即可判断算法是否正确有效。也可利用单片机与上位机的通信,将MPU6065反馈的摆杆姿态实时传送回PC机,再利用Matlab等应用程序画出风力摆的运动轨迹,以便更好地分析评估。
实际测试时,风力摆摆杆长65 cm,水平放置时,底端距地面15 cm,设置模式为画圆,轨迹半径为45 cm。上位机监测的θ、φ的值如图10所示,图10中上图显示为θ,下图为φ,θ保持在30°左右,φ从-180°~180°周期性变化。该测量值符合以定长半径做圆周运动的实验现象,且实际轨迹半径约为(65+15)/sin(30°)=46 cm,误差在可接受范围内。
实测表明,该实验平台可实现通过按键操作控制风力摆完成不同轨迹的运动,稳定性高、可重复,便于二次开发和利用。
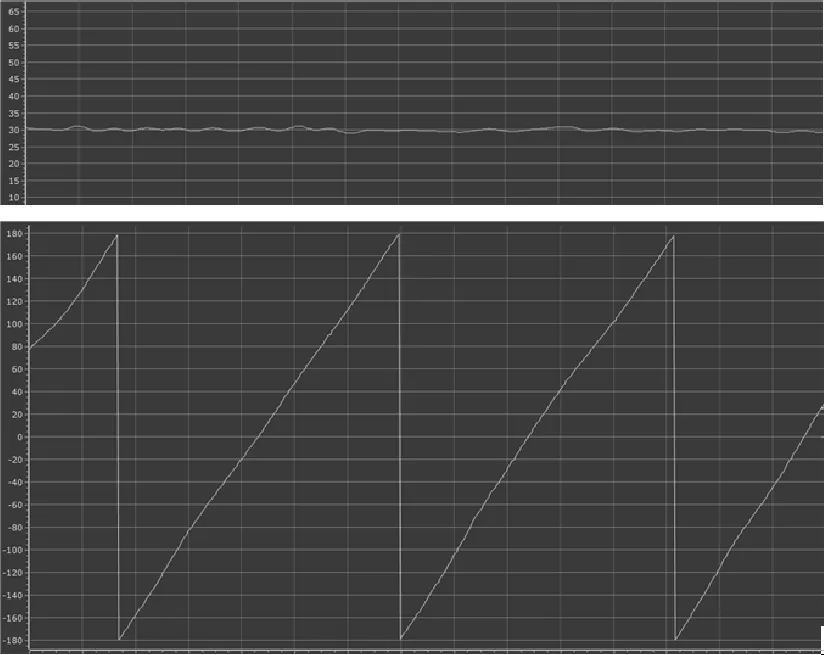
图10 上位机监测值
5 结束语
以大学生自主创新与电子设计竞赛为背景,介绍了风力摆实验平台的研究与应用。该平台整合了风力摆系统上所需的所有电路模块和实验装置,包括单片机最小系统、轴流风机驱动模块、姿态测量模块、电源模块、人机交互模块及悬挂轴风力摆所需的支架。同时提供控制风力摆做不同轨迹运动的算法和CCS开发平台上的配套代码,可供参考和学习使用。该实验平台是对电子信息类多门课程的综合,适用于本科生实验教学,同时为准备参加全国大学生电子设计竞赛的学生提供了一个快速入门的机会,可加深学生对理论课程的理解。该平台具有极强的可拓展性,可激发学生进一步创新,拓展出更多功能。
本实验平台的研究得到了武汉大学设备处实验开放项目的大力支持,特在此表示感谢。
[1]周佳社,任爱锋,苏涛,等.大学生自主创新与电子设计竞赛机制实践与探索[J].高校实验室工作研究,2014(1):84-87.
[2]柴钰.大学生自主管理的开放创新实验室模式[J].实验室研究与探索,2012(1):82-85.
[3]廖志豪.基于素质模型的高校创新型科技人才培养研究[D].上海:华东师范大学,2012.
[4]杨云,倪勇.电子创新基地建设与创新人才培养模式实践[J].实验室研究与探索,2010(10):342-344.
[5]杨燕翔,杨洪.从电子设计竞赛谈课程体系改革与创新能力的培养[J].高等教育研究,2004(4):63-64.
[6]马忠梅.ARM嵌入式处理器结构与应用基础[M].北京:北京航空航天大学出版社,2002
[7]胡振国.基于ARM的嵌入式软硬件系统设计与实现[D].成都:电子科技大学,2010.
[8]朱乐乐.基于ARM Cortex-M4内核的多功能教育机器人开发研究[D].苏州:苏州大学,2013.
[9]叶朝辉.TM4C123微处理器原理与实践[M].北京:清华大学出版社,2014.
[10]杨明辉,孙猛猛,张玉炳,等.BTN7960直流伺服电动机驱动板的设计[J].科技展望,2015(18):110.
[11]正近日英飞凌公司.BTN7930B/7960B/7970B/7971:电机驱动器IC[J].世界产品与技术,2009(3):26-26.
[12]赖义汉,王凯.基于MPU6050的双轮平衡车控制系统设计[J].河南工程学院学报(自然科学版),2014(1):53-57.
[13]ADEM H H,VANAPALLI S K.Review of methods for predicting in situ volume change movement of expansive soil over time[J].Journal of Rock Mechanics and Geotechnical Engineering,2015(1):73-86.
[14]孟海斌,张红雨.嵌入式系统电源芯片选型与应用[J].单片机与嵌入式系统应用,2010(12):7-10.
[15]陈文涛,龚善初.单摆振动分析[J].湖南理工学院学报(自然科学版),2008(1):66-70.
[16]叶龙.基于MPU6050传感器的方位角倾角算法研究[D].长春:吉林大学,2015.
[17]杨智,朱海锋,黄以华.PID控制器设计与参数整定方法综述[J].化工自动化及仪表,2005(5):1-7.
[18]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011(1):166-172.
[19]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学,2005.
[20]李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012(1):114-117.
[21]黄忠良.线反转法矩阵键盘程序设计[J].电脑学习,2011(1):61-62.
DesignandApplicationoftheWind-pendulumExperimentalPlatformBasedonARM
XIA Tong,YE Xiaohan,HU Ting,SUI Zucui
(School of Electronic Information,Wuhan University,Wuhan 430072,China)
In view of the independent innovation and electronic design of college students,this paper introduces the research and application of the wind-pendulum platform based on ARM.The experimental platform integrates all the circuit modules and experimental devices required on the wind-pendulum system,including MCU,axial fan driver module,measurement module,power module,human-computer interaction module and the stand used for hanging the pendulum.At the same time,the algorithm for the wind-pendulum’s moving at different trajectory and corresponding code based on CCS are also provided for reference and learning to use.The experiment results show that experimental platform can realize the movement of different trajectories by controlling the wind-pendulum operation.The experimental phenomenon is obvious.
college students’ autonomous innovation and electronic design;experimental platform;experimental teaching;wind-pendulum
2016-03-16;修改日期:2016-04-29
武汉大学自主式开放实验(WHU-2016-KFSy-03)。
夏彤(1995-),女,本科生,主要研究方向为电子信息工程。
隋竹翠,讲师,主要从事课程与教学论及教育学方面的研究,scz@whu.edu.cn
TP23
A
10.3969/j.issn.1672-4550.2017.04.011