基于Matlab与组态王的智能控制实验平台设计
2017-09-03盖文东高宏岩
盖文东,张 宁,张 婧,高宏岩
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
基于Matlab与组态王的智能控制实验平台设计
盖文东,张 宁,张 婧,高宏岩
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
该文针对现在智能控制教学中缺乏实践环节的问题,设计了基于Matlab与组态王的智能控制实验平台。该实验平台利用Matlab完成智能控制闭环仿真,并通过OPC技术与组态王进行实时数据通信,实现了对实验过程的动态监控。以基于模糊自适应的直流电动机转速-电流双闭环运动控制为例说明了该实验平台的设计过程,并将该控制算法与经典PID控制算法进行仿真比较以验证其有效性。应用效果表明,该实验平台能够直观、形象地展示实验结果,满足智能控制实验教学的要求,并且便于学生根据自己的需求进行二次开发。
智能控制;模糊自适应;组态王;OPC;运动控制系统
智能控制是近年来发展起来的一门前沿交叉学科,是自动化及相关专业方向的一门专业选修课[1]。但因在教学过程中缺乏能够锻炼学生实践能力的实验设备,学生只注重了理论知识的学习,没有达到较好的教学效果。为此,本文以直流双闭环运动控制实验为例,建立基于Matlab与组态王的智能控制实验平台,用于学生的实验教学。
转速、电流双闭环控制直流调速是运动控制教学中一种典型的实验[2-4],目前学校运动控制实验设备主要采用天煌教仪DJDK-1型,该实验设备价格昂贵而且该设备采用传统PI串级控制算法,实验中最大的困难是PI参数的整定,本文设计的实验平台可实现转速PI参数[5-9]的自整定。并利用OPC技术实现Matlab与组态王的数据通信,在组态王中设计监控界面,利用组态王较好的人机互动界面实现对控制系统实时监控[10]。本实验平台适用于多种智能控制算法,仅需要一台计算机便可完成实验平台的搭建,具有经济性好、开放性好、开发周期短等优点。
1 实验平台总体方案设计
通过OPC技术,将Matlab与组态王相结合构建仿真实验平台,既能发挥Matlab在算法设计与仿真方面的优势,又能充分发挥组态王在动态画面显示方面的特点,使学生在完成算法设计的同时,能够较为直观地感受实验过程。该实验平台的总体结构如图1所示。

图1 系统总体结构图
Matlab作为客户端完成控制系统仿真将Simulink中控制系统输出通过OPC tool传送到组态王监控界面[9-10]中显示。组态王作为服务器将控制参数传送到Simulink中以完成控制系统的仿真。
建立Matlab与组态王之间通信连接的步骤如下。
1)搜索可用的OPC服务器。
为了建立与OPC服务器的连接,首先要知道OPC服务器的ID及其所在的主机名。组态王的默认服务器名称是KingView.View.1,使用指令hostInfo即可查询到组态王的默认服务器。
2)建立OPC服务器与客户端连接。
在客户端建立组对象并添加变量。若Matlab中无法检索不到组态王中的数据变量,需使用添加格式“item名.value”手动添加。
3)建立组对象(Group)与Simulink的连接。
调用OPC tool中的OPC Config real-time、OPC read、OPC write 模块,将Simulink中的输出作为OPC Write模块的输入[10-11],写入到组态王中并显示实时曲线变化。组态王中的数据变量作为OPC Read的输入作为Simulink的仿真参数。
Matlab与组态王软件均运行在同一台计算机上,这为学生完成相关实验提供了方便。
2 基于模糊自适应的运动控制实验设计
2.1 模糊自适应PI控制算法设计
文中采用的模糊自适PI控制器结构图如2所示。
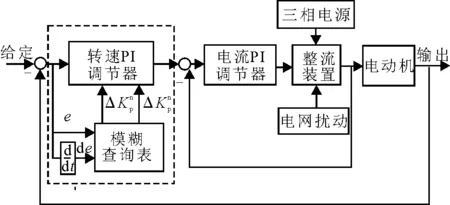
图2 模糊PI控制器结构图
模糊PI控制器由转速PI控制器和模糊查询表构成,模糊查询表计算公式如下:
(1)
1)设置模糊控制器的结构。

2)选定论域、语言值和隶属度函数。

3)制定模糊规则。

表的模糊控制规则

4)去模糊化计算模糊查询表。
去模糊化采用重心法,然后乘上比例因子,最终得到如图3和图4所示的模糊查询表。
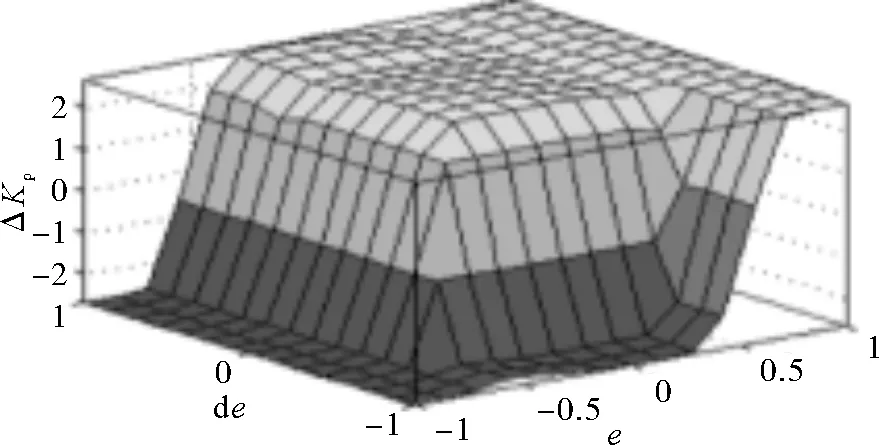
图模糊查询表三维曲面

图模糊查询表三维曲面
2.2 模糊自适应PI控制算法仿真验证
该实验平台的被控对象为他励直流电动机,其关参数如表2所示。

表2 控制对象相关参数表



图5 传统PI与模糊自适应PI算法性能比较
与传统PI串级控制算法相比,模糊自适应PI控制算法的转速超调量和电流超调量更小;电网电压扰动时,模糊自适应PI控制算法的转速和电流波动更小,即具有较好的跟随性能和抗扰性能。Simulink仿真如图6所示。
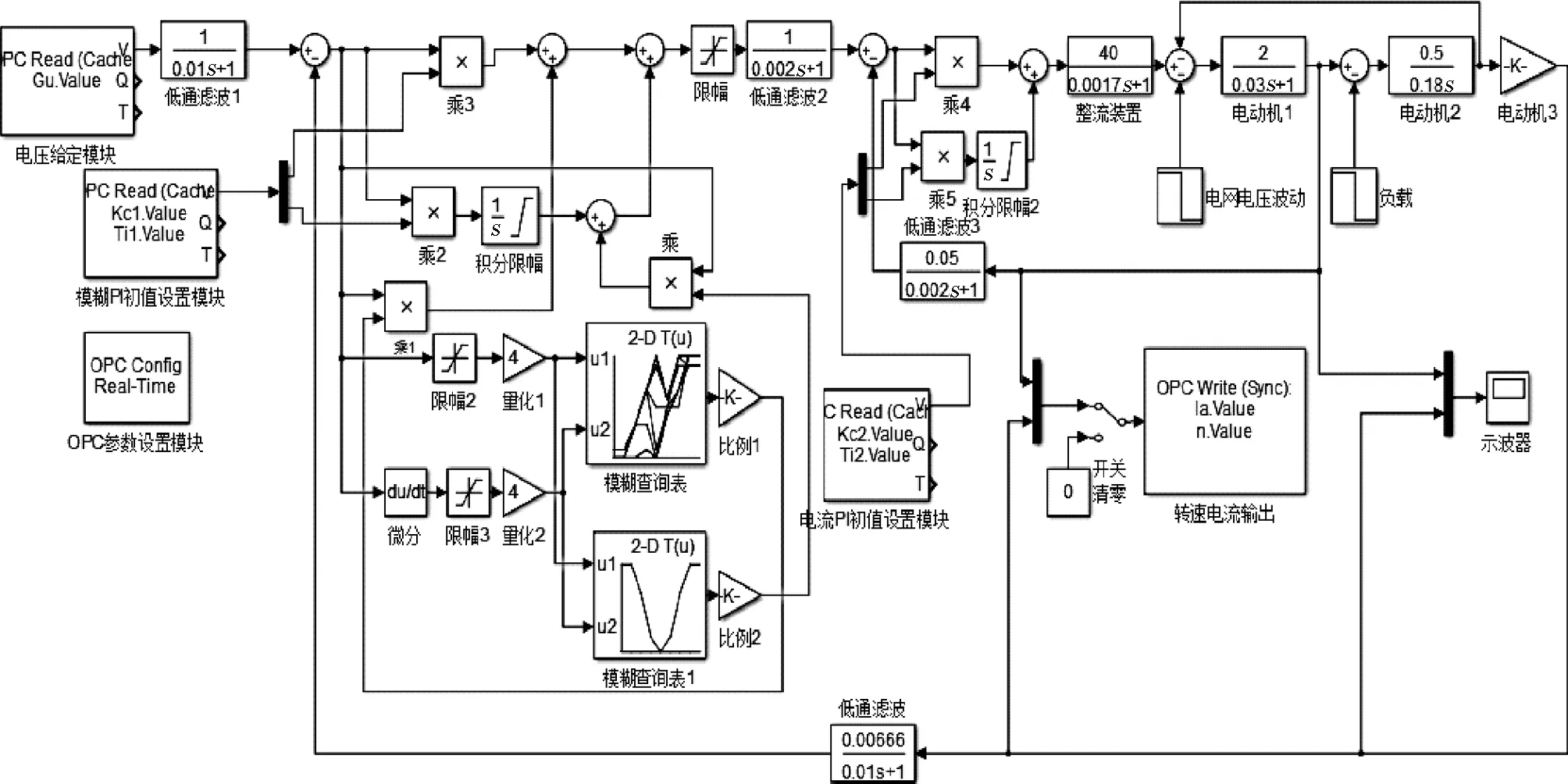
图6 模糊自适应PI控制仿真图
2.3 组态王监控界面设计与动态演示
监控界面设计包括静态图素的界面设计和数据变量的建立以及两者之间的动态连接[13-15]。组态王监控界面如图7所示。
系统运行时,监控界面的数据通过OPC模块传送到Simulink中运行。监控界面的给定电压传送到图6中的电压给定模块作为系统的给定,模糊自适应PI控制器和电流控制器的参数分别传送到图6中模糊PI初值设置模块和电流PI初值设置模块的仿真参数,仿真系统的转速与电流输出通过转速电流输出模块传送到监控界面中的转速仪表和电流表中实时显示。实时曲线可实现对电机转速和电枢电流变化实时监控。

图7 组态王监控界面
2.4 实验平台功能特点与应用分析
基于组态王与Matlab的智能控制实验平台,其优势体现在以下3个方面。
1)经济性好。该实验平台不需要昂贵的硬件设备,只需要一台计算机即可完成所有的实验工作,实验操作简单,受实验条件限制小。
2)灵活性好、易于实现二次开发。该实验平台可以实现模糊自适应PI控制算法和传统PI算法。在该实验平台基础上,学生可以自行设计多种智能控制算法,既可以满足智能控制课程实验的要求,又能满足学生开展课程设计、创新研究等二次开发的要求。
3)直观。组态王监控界面具有直观、形象的特点,相比Simulink仿真,可以使学生对智能控制方法的控制效果有更为直观的感受,从而提高了学生的学习兴趣和积极性。
3 结束语
针对智能控制教学中存在缺乏实践环节的问题,设计了基于Matlab与组态王的智能控制实验平台。该实验平台操作简单,有助于学生对智能控制知识的认知和动手实践能力的锻炼,而且便于学生进行二次开发和创新研究。
[1]王耀南,孙玮.智能控制理论及应用[M].北京:机械工业出版社,2008.
[2]陈荣.《电力拖动自动控制系统》虚拟实验系统设计[J].实验科学与技术,2013,11(6):15-16,48.
[3]陆建康,王泽锋.双闭环调速系统设计方法的改进及其仿真[J].系统仿真技术,2010,6(1):30-32.
[4]寸巧萍.自动控制系统实验教学中的仿真技术应用[J].实验科学与技术,2007,5(2):51-53.
[5]张梓琪.基于组态王与Matlab的液位控制仿真平台构建[J].实验室研究与探索,2013,32(9):82-85.
[6]杨祖元,杨华芬.双闭环直流调速系统模糊PID控制研究[J].计算机应用研究,2011,28(3):921-923.
[7]尚丽,崔鸣,陈杰.基于Matlab/Simulink和GUI的运动控制系统虚拟实验平台设计[J].实验室研究与探索,2011,30(1):183-185.
[8]闫虎民.基于模糊自整定PID的直流电机调速系统研究[D].天津:天津大学,2013.
[9]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[10]林跃,张彦武.OPC技术及其在工控组态软件中的应用[J].基础自动化,2001,8(2):41-43.
[11]邹益民.基于OPC的MATLAB与组态王实时通讯在过程控制实验装置中的应用[J].自动化仪器与仪表,2014,10(3):87-89.
[12]麦雪凤.基于A3000的模糊-PI双模控制实验设计与开发[J].实验室研究与探索,2013,32(8):89-92.
[13]宋志崇.监控组态软件的研究与设计[D].大连:大连理工大学,2008.
[14]李安伏,崔亚量.基于OPC与组态王的Matlab通信[J].电力自动化设备,2007,27(7):113-115.
[15]胡开明.基于OPC与组态技术的自动控制实验教学仿真平台开发[J].实验技术与管理,2013,30(6):51-53.
IntelligentControlExperimentPlatformBasedonMatlabandKingView
GAI Wendong,ZHANG Ning,ZHANG Jing,GAO Hongyan
(College of Electrical Engineering and Automation,Shandong University of Science and Technology,Qingdao 266590,China)
The intelligent control experiment platform based on Matlab and KingView is designed for the lack of practice in intelligent control teaching in this paper.The experimental platform uses Matlab to complete the intelligent control closed-loop simulation,and through the Object linking and embedding for process control(OPC) technology and configuration Kingview data communication,to achieve the dynamic monitoring of the experimental process.The design process of the experimental platform is illustrated by taking the fuzzy self-adaptive DC motor speed-current double closed-loop motion control as an example.And the fuzzy control algorithm is compared with the classical PID control algorithm to verify its effectiveness.The application results show that the experimental platform can display the experimental results visually and vividly,and meet the requirements of intelligent control experiment teaching,and facilitate the secondary development of the students accroding to their own needs.
intelligent control;fuzzy adaptive;KingView;OPC;motion control system
2016-01-11;修改日期:2016-05-07
山东省研究生教育创新计划项目(SDYY16002);山东科技大学优秀教学团队建设计划资助(JXTD20170510);青年教师教学拔尖人才培育计划资助项目(skzdhjxbj153);山东省自然科学基金资助项目(ZR2014FQ008)。
盖文东(1982-),男,博士,讲师,主要从事飞行控制、控制理论及其应用方面的研究。
张宁,硕士生,主要从事控制理论及其应用方面的研究,18306423245@163.com
TP273.4
A
10.3969/j.issn.1672-4550.2017.04.042