海底地形测量技术在南麂列岛生态浮标选址中的应用
2017-09-03朱勇陈良周
朱勇,陈良周
(1.扬州市职业大学,江苏 扬州 321009; 2.浙江省第十一地质大队,浙江 温州 325006)
海底地形测量技术在南麂列岛生态浮标选址中的应用
朱勇1*,陈良周2
(1.扬州市职业大学,江苏 扬州 321009; 2.浙江省第十一地质大队,浙江 温州 325006)
介绍了水深测量的方法、水深测量误差的影响因素以及海底地形测量技术方案等,并以南麂列岛生态浮标选址海底地形测量项目为例,叙述了单波束配合人工潮位观测进行海底地形测量全过程,并对结果做了分析。
水深测量;误差分析;海底地形测量;生态浮标选址
1 引 言
海底地形测量是指确定海底地貌情况,并将有关要素展绘在图纸上,所绘制的地形图是海洋研究,国防和经济建设所必需的基础资料。海底地形和陆地地形一样,包括海底地物和海底地貌两部分。海底地貌是指高低起伏的海底形状,包括礁石、浅滩和深沟等;海底地物是指沉船和其他障碍物等。本文以南麂列岛生态浮标选址海底地形测量项目为例,叙述了单波束配合人工潮位观测进行海底地形测量相关技术问题。
2 水深测量方法与误差分析
2.1 水深测量方法
水深测量的主要方法有单波束与多波束回声测深仪等。
单波束测深也叫回声测深法,一般是利用船上装的测深仪向海底发射声波,通过测定接收到海底反射声波的时间,计算海水面到海底距离。单波束测深波束的指向性和发射脉冲的宽度分别影响被测目标的方位和深度分辨率。单波束测深仪数字化记录和图上的水深值,是由换能器底面至海底的深度值。换能器浸没在海水中,由于测深仪设计转速、声速与实际的转速、声速不同以及换能器的安装等原因,需要对其进行吃水改正、基线改正、转速改正及声速改正等。目前,对各项改正一般采用综合处理,求取总改正对测量深度的影响,通常采用的改正方法包括校对法和水文资料法。[2]校正法适用于小于 20 m的水深。利用校准工具,如带有刻度电缆的水听器、带有刻度缆绳的比对板等,置于换能器下面一定深度处,读取校对工具的入水深度,与测深仪的读数相比较,差值为测深仪总改正数△Z。水文资料法适用于大于 20 m的水深,利用实测数据(包括各水层的温度、盐度、深度)分别利用相应的公式求取各改正数,最后求取测深仪总改正数。
多波束测深系统是为了测定船只航线两侧的海底信息资料而研制的一种能在测船航线左右两侧对称的有效带内测定全部海底地形信息的回声测深系统,它是在回声测深仪基础上发展而来的,其基本原理和回声测深仪相同,它们最大的区别就在于单波束和多波束,如图1所示。
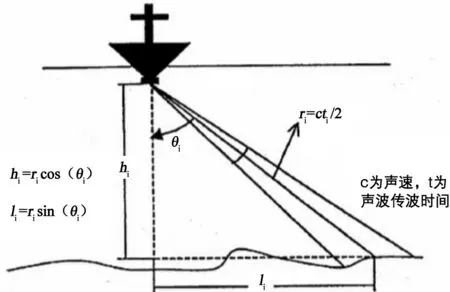
图1 多波束水深测量原理
与传统的单波束测深仪相比较,多波束测深系统具有测量范围大、速度快、精度高、记录数字化以及成图自动化等诸多优点,它把测深技术从原来的点线状扩展到面状,并进一步发展到立体测图和自动成图,从而使海底地形测量技术发展到一个较高的水平。多波束换能器以一个较大的开角(如120°)向水下发射声波多波束,同时接收几十束或上百束声波,那么每发射一个声波,便可在垂直于航线上得到一组水深数据。当测量船连续航行时,便可得到一个宽带的水下地形资料[6,7]。
2.2 水深测量误差分析
除了常规水深测量改正以外,还必须考虑周边环境对测深的影响,包括波浪产生的船只横摇、纵摇和升沉以及船速对定位、测深和航向改变等的影响[8]。
(1)波浪对测深的影响
波浪对测深的影响在浅水区主要表现为升沉方面,而在深水区主要表现为横摇和纵摇方面。因此,为了提高测深精度,在小船上(用于浅水测量)应首要安装升沉传感器,在大船上(用于深水测量)应首要安装纵、横摇传感器。同时,对于未安装船姿传感器的测量船来说,必须使测船的横、纵摇角限制在一定范围内[4]。
(2)船速对测深的影响
船速对测深的影响包括直接效应和间接效应。所谓间接效应是指船速作为参数伴随其他效应对测深的影响。例如,动态吃水改正、定位与测深的延时效应、波浪对测深的影响等方面均存在着船速影响的间接效应[5]。本文主要从定位与测深两个方面来讨论船速对测深的直接效应。《海道测量规范》规定水深点的定位中误差应小于图上 1.5 mm;在平坦海区,定位点图上间隔为 4 cm,在复杂海区为 3 cm[10]。设1/k为测图比例尺,ε为定位点图上间隔,则定位点间隔实地距离d为:
d=kε
(1)
随着海底地形测量的发展,获得高密度的定位点是必需的。引入测船航速v,则可得定位点时间间隔△t0为:
△t0=d/v=kε/v
(2)
由于定位系统的定位时间间隔受到仪器硬件本身的限制,因此,通常情况下是通过已知定位系统的定位时间间隔△t0以及定位点的间隔ε来选择合理的航速v,即:
v=d/△t0=kε/△t0
(3)
如果定位系统连续定位能力越高,则△t0越小。而对于DGPS定位来说,具有快速的连续定位能力,通常△t0≤1s,因此,船速问题对于定位点间隔的影响可以不加考虑。
船速与换能器测深频率(重复脉冲频率)的关系相对比较复杂。通常,测深频率依赖于测量水深,并且不同的测深仪有不同的测深速率。设f为测深频率,θ为换能器半波束角,d为测深深度,D为两个连续脉冲之间测船移动的距离,则:
D=v/f
(4)
探测脉冲的覆盖范围为
2H=2dftanθ
(5)
显然,如果D≤2H,则不会漏掉海底地形信息,因此可得:
v≤2dftanθ
(6)
合理的选择船速不是一个简单的问题,必须进行多方面的考虑和评估后来决定将采用的船速,建议采用以下的选择方法:
①按照定位系统的连续定位能力(即最小定位间隔)及定位点图上间隔来决定可采用的最大船速。
②按照测深系统的测深速率及海区水深来决定可采用的最大船速。
③选择上述较小船速值,并对动态吃水改正及波浪等影响进行估算,若超出有关精度指标,则应进一步降低船速。
(3)潮汐对水深测量的影响
在海底地形测量时,还需根据测区范围及测区的潮汐特点等因素设立验潮站,并在测深的同时进行潮汐观测,其目的对测深值进行潮汐改正,以获得对应某一深度基准面的水深值[9]。当测区在某一水位站控制范围内是,可根据该站的水位资料进行直接改正。为求得瞬时的水位改正数,可根据水位观测资料,先绘出水位过程线。规范一般要求水位观测每 10 min观测一次[10],而测深值的采样间隔一般为几分钟到几秒钟,取决于测图比例尺的大小,比例尺越大采样间隔越密。为了进行水位改正,解决两个数据时间不匹配的问题,必须进行潮汐观测值内插。通常采用的方法有线性内插法、回归内插法、时差法内插和分带法内插法等[11,12]。
3 海底地形测量技术方案
3.1 测深线布设
测深线可以分主测深线、补充测深线和检查测深线。主测深线是测深线的主体,它担负着探明整个测区海底地形的任务;补充测深线起着弥补主测深线的作用;检查测深线是检查以上测深线的水深测量质量,以保证水深测量的精度。
主测深线的间隔依测图比例尺选择,一般为图上 1 cm,允许变通范围为图上 0.5 cm~2.0 cm。在测深间距一定的情况下,应正确选择测深线方向。依照不同的海域情况,测深线可采用不同方法布置。
3.2 水位观测和测船定位
由于海水面是不断变化的,所以在测量水深的同时,必须进行水位观测。水位观测的目的是为确定深度基准面与航行基准面提供依据以及为水深测量提供水位改正值,在水位站附近还应该布设有一个或若干个水准点作为水位站的水尺零点高程引测和定期检核的基准。水尺零点高程的引测,视其精度一般可按四等水准或图根水准联测。
海底地形测量时,测量船以均匀的速度行使在测深线上,并按规定的间距进行水深测量和确定点的平面位置。常用的测深点定位方法有交会法、极坐标法、无线电定位法以及GPS定位法。在宽阔的湖泊、河口、港湾及海洋上进行定位时常用GPS定位法。
3.3 水深测量值的归算
海洋测量得到的水深数据必须归算为深度基准面至海底的垂直距离,所以必须要进行海图深度改正,即瞬时深度=海图深度+水位(潮汐)改正。而瞬时深度必须对回声测深仪的观测深度进行仪器改正、声速改正和动态吃水改正,即:
瞬时深度H=观测深度O+仪器改正△I+声速改正△S+动态吃水改正△D
3.4 数据处理
海底地形测量的外业工作结束后,应及时地进行观测成果的内业整理,将海底地形点展绘到图纸上,勾绘等深线。对于点位精度要求的大比例尺海底地形图,应求出各测点的坐标,根据坐标进行展点。勾绘等深线的目的,在于了解海底地貌的形状,分析水下探测的完善性。同时,也可以发现特殊深度和分析测深线布是否合理,从而确定是否需要补测和加密探测等。因此,勾绘等深线时,要仔细、全面和尽可能地反映出海底地貌的变化情况。
4 工程应用及结果分析
南麂列岛位于浙江省东南部海面,隶属平阳县鳌江镇,整个列岛由大小52个(面积大于 500 m2)岛屿组成,海岸线总长 75 km,陆域面积 11.13 km2。南麂岛地处亚热带,海洋的自然环境条件优越,特色鲜明。1990年9月经国务院批准列为我国首批5个国家级海洋类型自然保护区之一。南麂列岛远离大陆,海水清澈,含沙量低,海域底质以粉砂质黏土为主,海底地形自西向东南下倾,水深一般在 15 m~25 m之间,南麂岛东北和西南两侧为深水通道,其水深在 30 m以上,最深处达 45 m。该区域以海蚀地貌为主,岸线曲折,岬角丛生,海湾众多,礁石密布,沙滩多样,是江浙沿岸流与台湾暖流交汇和交替消长的区域。气候温和,年平均气温为16.5℃,夏无酷暑,冬无严寒。
本工程对国家海洋局温州海洋环境监测中心站选定的两块选址区域进行 1∶2 000水下地形测绘,并在两个选址区域内各采样底质进行粒度分析,如图2所示,以便全面掌握该区域水下地形和底质情况,为建立生态浮标实时监测系统建设提供基础技术资料。工期为2015年6月8日~2015年6月22日,总工程量约 2 km2。
(1)选址一:马祖岙,中心位置(121.0482E,27.4758N)
(2)选址二:大沙岙,中心位置(121°04′04.47″,27°27′21.86″)

图2 测区范围
4.1 平面坐标系统及高程基准
平面坐标系采用WGS84坐标系,横轴墨卡托投影3°带,中央子午线为120°E,高程(深度)基准采用1985国家高程基准(二期)。经现场踏勘,业主提供的3个控制点(GD25、GD44、GD45)点位保存完好,准确可靠,可以作为本次测量的起算依据。
4.2 水深测量
测前准备包括:
(1)测量的仪器检查:包括用于外业测量的设备是否齐全、仪器是否正常工作、电瓶及锂电池是否电力充足等。
(2)外业测量测线布设:测图比例1∶2 000,测线间距不超过 30 m。
(3)测量前、后都需用测试板校准测深仪声速并在测深纸上记录。
外业测量包括水深测量、潮位控制、利用HYPACK进行数据编辑等。
(1)利用中海达HD-370全数字变频测深仪和广州南方S35差分机连接,形成一个完善的海上测量数据采集系统,利用南方S35差分机实时动态定位的优势,获取每个测量点的平面坐标,以“GD25”为基准点测量。
(2)根据测区的特点决定采用验潮模式进行水深测量,并以“GD025”作为验潮站。
(3)严格执行《水运工程测量规范》(JTS131-2012)[10],测量前进行必要的仪器校准。采用国际通用的Hypack 4.3疏浚软件施测,由计算机自动采集差分机收到的平面坐标、潮位及同步的水深数据,同时记录时间并存盘,显示航迹,测量时现场填写外业工作记录表。
(4)外业测量时,值班人员必须注意测线航迹间距、测深纸记录、差分机接收等情况,当发现情况异常时,应及时进行补测。
4.3 成图编绘整理
水下地形及浅滩测量数据经预处理后,统一采用CASS7.0软件经无缝连接形成最终成果图,如图3所示。

图3 最终成果图
4.4 结果分析
将处理后的水深值插入等深线后,根据等深线的分布呈现明显规律性,可依次分析解释水下地形地貌,判断适合作为生态浮标选址。从图3可以看出,该区域整体水深由西向东变浅,东部等深线密集,显示水深变化变化较大,反映出这块区域地形较为急剧。中西部区域等深线相对稀疏,且深度较东部变深,水深变化相对平缓,地形变化较东部平坦很多。掌握了该区域水下地形和底质情况,便可为建立生态浮标实时监测系统建设提供基础技术资料。
5 结 语
海洋测绘是我国测绘科学技术中的一个重要组成部分,水深测量是海洋测绘中的主要内容。本文通过对水深测量的基本原理、水深误差分析做了简要介绍,并以南麂列岛生态浮标选址海底地形测量项目为例,叙述了单波束测深仪配合潮位观测进行水深测量数据采集与处理的全过程。单波束水深测量技术已经在海洋测量中得到普遍应用,为了更好地实现水下地形的测量工作,不仅充分考虑仪器的精确度,选择适当的测量仪器,还要对其他的测量方面进行充分的兼顾,从而不断推进我国海洋测绘技术的发展。
[1] 黄张裕,魏浩翰,刘学求. 海洋测绘[M]. 北京:国防工业出版社,2007.
[2] 国家测绘地理信息局职业技能鉴定指导中心. 测绘综合能力[M]. 北京:测绘出版社,2012.
[3] 王志红,刘吉波,张伟虎等. 水深测量技术在航道工程中的应用[J]. 测绘与空间地理信息,2015,38(2):66~68.
[4] 阳凡林,李家彪,吴自银等. 多波束测深瞬时姿态误差的改正方法[J]. 测绘学报,2009,29(6):26~29.
[5] 刘胜旋. 关于表层声速对多波速测深影响及改正的探讨[J]. 海洋测绘,2009,29(6):26~29.
[6] 黄辰虎,陆秀平,欧阳永忠等. 多波束水深测量误差源分析与成果质量评定[J]. 海洋测绘,2014,34(2):1~6.
[7] 梁志诚,黄文骞,魏帅等. 多波束测量的精度控制与规范指标[J]. 测绘工程,2016,25(2):57~60.
[8] 陆伟. 单波束水深测量及其质量控制-以温州港水下地形测量项目为例[D]. 武汉:武汉大学,2015.
[9] 暴景阳,刘雁春. 海道测量水位控制方法研究[J]. 测绘科学,2006,23(6):49~51.
[10] JTS131-2012. 水运工程测量规范[S].
[11] 黄振虎,陆秀平,申家双等. 海道测量水位改正通用模式研究[J]. 海洋测绘,2011,31(4):13~16.
[12] 黄辰虎,陆秀平,欧阳永忠等. 远海航渡式水深测量水位改正方法研究[J]. 海洋测绘,2013,33(5):10~14.
Seabed Terrain Measurement Technology in Location of Nanji Island Ecosystem Buoy
Zhu Yong1,Chen Liangzhou2
(1.Yangzhou Polytechnic College,Yangzhou 321009,China;2.The eleventh Geological Brigade of Zhejiang Province,Wenzhou 325006,China)
This paper introduces the influence of water depth measurement method,measurement error factors and depth of the seabed terrain survey technology,and the ecological location of Nanji Islands buoy seabed terrain survey project as an example,describes the single beam with artificial tidal observation were bathymetric surveying the whole process,and the results are analyzed.
water depth measurement;error analysis;bathymetric surveying;ecological buoy site selection
1672-8262(2017)04-130-04
P229.1
B
2016—12—29
朱勇(1979—),男,硕士,讲师,主要从事《数字测图》、《工程测量》等课程的教学以及研究工作。
