涂胶机器人工作站安全系统设计
2017-09-03王心国佛山市勒流职业技术学校
王心国佛山市勒流职业技术学校
涂胶机器人工作站安全系统设计
王心国
佛山市勒流职业技术学校
本篇论文系统地阐述了,利用SICK S30B型安全激光扫描器进行对风挡涂胶机器人工作站下件台区域的安全检测,并将信号传送给S7-300PLC处理,PLC接收信号处理完成后发送给KUKA机器人让机器人停止或继续运行,同时PLC将信号反馈到触摸屏W inCC flexible,便于可视化观察SICK S30B安全型激光扫描器状态,整个过程确保下件台操作区域的设备与人员的安全。通过试验与运行测试系统达到了设计要求。此设计具有安全、可靠、通用性强、有较好的推广前景。
激光扫描器;PLC;工业机器人;触摸屏;安全
一、引言
风挡涂胶机器人工作站是采用德国KUKA C4七轴机器人通过对上件区域玻璃的抓取,并按轨迹运行到涂胶塔,依据玻璃工艺轨迹进行涂胶行走,涂胶完成后,机器人将玻璃侧放在下件台上,机器人回原点位置,进行下一遁环,此时下件台区域生产操作人员取走玻璃进行车辆风挡玻璃的手动安装。在下件台玻璃取走时操作人员需要按下复位按钮对下件台区域的垂直对射光栅进行复位,机器人的每一次放件只有满足程序的条件后才能进行下件台的放件。但在实际使用中操作人员由于抢节拍以及习惯性的按复位按钮,当操作人员进入垂直光栅后该区域存在检测盲区,此时另外一个操作人员无意按复位按钮后机器人刚好在等待放件区域上空,就会造成机器人动作下放件与操作人员发生碰撞的安全事故发生,为避免该类事故发生,设计更安全的全区域无盲区扫描,判断是否有操作人员进入下件区域。根据操作安全的要求,设计一套对于下件台区域是否有操作人员进行可靠性检测的系统,从根本上防止发生事故的功能,即使在错误操作或发生故障的情况下也不会发生事故,这对于设备的安全生产是非常重要的。
二、基本要求及技术指标
(一)工业机器人涂胶工作站安全系统工作基本要求如下
1、要求能够检测出下件台工作区域是否有操作人员。
2、下件台区域有操作人员时机器人不能往下件台放件。
3、下件台安全区域能在WICC触摸屏上监控状态。
4、框图如下所示。
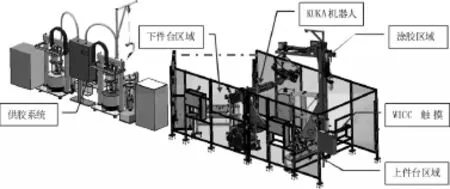
图1 风挡涂胶机器人工作站
(二)风挡涂胶机器人工作站安全技术指标如下
1、下件台安全区域检测准确率达100%。
2、下件台区域存在操作人员时机器人不放件,准确率100%。
三、风挡涂胶机器人工作站安全系统硬件设计
本系统设计系统使用西门子S7-300(317F-2PN/DP)CPU接收SICK S30B型安全激光扫描器对下件区域的扫描信号,PLC程序执行反馈给KUKA机器人作为是否可进行放件的安全条件,同时PLC反馈给WICC触摸屏可监控SICK S30B型安全激光扫描器工作状况。系统设计中本着准确、可靠、稳定的原则、采用硬件与软件配合的方法进行设计。整个系统主要包括六大部分:电源模块、S7-300CPU、I/O模块、S30B安全激光扫描器、机器人、WICC触摸屏。通过实际的设计制作本系统具有区域安全检测功能,并达到设计要求。安全系统原理框图如下:
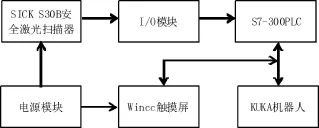
图2 风挡涂胶机器人工作站安全系统框图
机器人工作站下件台区域的安全检测硬件部分,及其工作原理框图如上图所示:其工作原理:电源模块给SICK S30B安全激光扫描器供电,安全激光扫描器对下件台区域是否有人员以及障碍物进行检测扫描,通过I/O模块采集安全激光扫描器信号反馈给PLC,经过PLC程序控制输出:非安全为0,安全为1,从而控制机器人停止或往下件台放件,同时把下件台安全状态发送到触摸屏直观显示,确保设备与人身的安全。
(一)电源模块
设计中采用西门子6EP1437-3BA10直流稳压电源给S30B激光扫描器、I/O模块、PLC、触摸屏供电,型号为:3AC/24VDC/40 A。
(二)SICK S30B安全激光扫描器
S30B是一种光学传感器,它的工作原理是:利用红外激光射线来二维式扫描其周围环境,用于监视机器和设备上的危险区域。本系统选用SICK S30B-2011BA安全激光扫描器进行下件台危险区域的扫描。
(三)控制器及I/O模块选择
本系统选用西门子CPU 317F-2 PN/DP带有SIMATICMMC 2M微存储卡,此CPU为故障安全型CPU,与ET200S分布式I/O采用Profinet通讯,与安全模块采用Profisafe通讯,由此安全通讯是在更高级别上进行通讯,安全级别较普通CPU要高。系统中选用ET 200S安全模块4/8 F-DIPROFISAFE,通过安全模块接收激光扫描器的信号并反馈给PLC。
(四)系统人机界面选择
选用西门子SIMATICHMIIPC677C,工业PC,15寸屏作为本站的触摸屏进行安全激光扫描器的状态监控,便于直观显示和设备维护,此触摸屏输入工作电压为DC24V。
四、风挡涂胶机器人工作站安全系统软件设计
在软件程序设计过程中,包括:PLC程序设计、机器人程序编写、S30B激光扫描器区域设计、触摸屏画面编辑。
根据系统设计要求PLC作为控制器的主程序,控制机器人的运行放件或停止等待放件。PLC采集S30B激光扫描器的信号,并通过程序的运算及输出给机器人作为机器人的放行或停止信号并将状态反馈给触摸屏画面。根据设计要求控制的流程图如下:
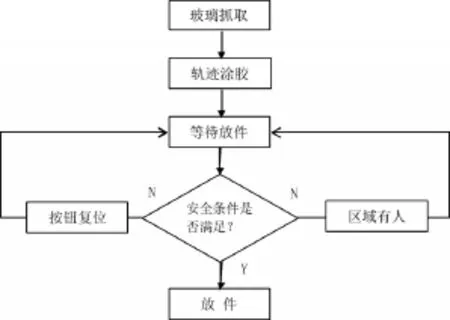
图3 风挡涂胶机器人工作站安全控制系统程序控制流程图
五、风挡涂胶机器人工作站触摸屏画面设计
本设计中触摸屏作为下件台区域激光扫描器状态的可视化的界面,方便日常点检,维修观察及日常的维护,对激光扫描器是否有信号输入到PLC,触摸屏可作直观的可视画面。
SIMATICWinCC flexible软件画面编辑:在系统画面中增加SICK S30B激光扫描器的状态显示,下件台区域安全情况下SICK图形显示绿色,当下件台区域扫描到有人或有遮挡时,SICK图形显示黄色/红色闪烁,提示下件区域有人进入状态,直到人员离开扫描区域及复位按钮后SICK图形才显示正常绿色状态。
结束语
通过对涂胶工业机器人工作站安全控制系统软、硬件部分设计,系统利用SICK S30B型安全激光扫描器进行对风挡涂胶机器人工作站下件台区域的安全检测,并将信号传送给S7-300PLC处理,PLC接收信号处理完成后发送给KUKA机器人让机器人停止或继续运行。通过试验与运行测试系统到达了安全、可靠、通用性强、提高工作安全的设计要求。
[1]刘华波.西门子S7300/400PLC编程与应用[M].机械工业出版社,2011
[2]姜建芳.西门子S7300/400PLC工程应用技术[M].机械工业出版社,2012
[3]廖常初.西门子人机界面组态与应用技术[M].机械工业出版社,2012
[4]叶晖.工业机器人实操与应用技巧[M].机械工业出版社,2011
[5]张洪润.传感器原理及应用[M].清华大学出版社,2008
[6]王庆有.光电传感器应用技术[M].机械工业出版社,2014
王心国(1976-),男,吉林人,本科,单位:佛山市勒流职业技术学校,职称:电子中学一级教师,研究方向:机电技术、电气自动化技术。
