电驱式玉米膜上直插穴播机前进速度补偿机构参数优化
2017-08-31石林榕赵武云李荣斌孙步功
石林榕 赵武云 孙 伟 李荣斌 孙步功
(1.甘肃农业大学机电工程学院, 兰州 730070; 2.酒泉铸陇农机有限责任公司, 酒泉 735000)
电驱式玉米膜上直插穴播机前进速度补偿机构参数优化
石林榕1赵武云1孙 伟1李荣斌2孙步功1
(1.甘肃农业大学机电工程学院, 兰州 730070; 2.酒泉铸陇农机有限责任公司, 酒泉 735000)
为提高电驱式玉米膜上直插穴播机膜孔合格率和播种深度合格率,对前进速度补偿机构和限深机构进行了计算,应用Matlab仿真前进速度补偿机构各参数对穴播轨迹的影响,筛选出主曲柄角速度、中心距和副曲柄长度对膜下播种深度合格率和膜孔合格率影响较大;采用三因素三水平响应面法进行多因素方差分析,结果表明:影响播种深度合格率的因素主次顺序为:中心距、副曲柄长度和主曲柄角速度;影响播种深度合格率的因素主次顺序为:副曲柄长度、主曲柄角速度和中心距;以播种深度合格率为主,兼顾膜孔合格率最大为优化目标,优化结果为:当主曲柄角速度为89.10 rad/s、中心距为58.55 mm、副曲柄长为95.1 mm时,播种深度合格率和膜孔合格率的5次均值分别为94.89%、93.61%。试验表明前进速度补偿机构运行平稳可靠,试验效果满足玉米播种机相关标准要求及甘肃省玉米播种农艺要求。
玉米; 穴播机; 前进速度补偿机构; 参数优化
引言
甘肃地理环境恶劣,十年九旱,地膜覆盖技术能最大效应增温保墒[1]。目前国内多数覆膜播种机采用先播种后铺膜模式,出苗前需人工或者机械破膜放苗,增加作业工序和劳动强度。膜上打孔播种技术在膜上打孔播种,省去了放苗工序[2]。西北地区的“秋覆膜”和“顶凌覆膜”较传统覆膜优势明显[3-4],“秋覆膜”是秋季覆膜保住7—9月份的降雨,为来年4月种玉米发芽生根之用;“顶凌覆膜”是避免地表在“昼消夜冻”过程中损失墒情,然而播种难度较大。针对两种覆膜方式甘肃省普遍采用人工或简易机械,劳动强度高、播种合格率低。国内研发成熟的膜上播种机以滚轮式播种机为主[5-6],播种较浅作物时,成穴器运动轨迹余摆线对地膜影响不大,较深作物时,易产生挑膜、刮膜等问题,西北多风会加剧膜孔开裂;同时,种子周围土壤扰动大,造成种子发芽周期较长。直插播种技术采用打孔器对地膜覆盖的土壤进行打孔,仅在穴孔位置开膜切开,利于保墒和抗旱。
1993年陈晓光等[7]首次提出并直插播种原理。此后国内对直插播种进行大量研究。2001年刘军干等[8-9]将平行四杆机构应用于小麦直插式覆膜穴播机中。2010年赵建托等[10]设计了旱地玉米全膜覆盖双垄沟播机直插式播种机,采用凸轮和曲柄组合机构控制成穴器,实现播种时间段成穴器水平绝对速度为零,解决了玉米播种机空穴率高、鸭嘴开启不可靠、撕膜等问题。赵武云等[11]针对西北地区旱地玉米全膜双垄沟播作业需求,采用凸轮-曲柄滑块机构、运动放大机构实现了成穴器的“零速”投种,解决了传统播种机作业时挑膜、撕膜、种穴与幼苗错位等问题。戴飞等[12]通过应用转动导杆机构与正弦机构进行串联,结合强排播种机构,有效缓解采用穴播作业方式易出现的多粒、空穴与成穴器堵塞问题。石林榕等[13]针对西北地区制种玉米机械化播种问题,结合制种玉米播种条件和农艺要求,设计了前进速度补偿机构,由转动导杆机构驱动平行四杆机构进行机具前进速度补偿来实现成穴器入土播种和出土期间水平位移差接近零,该直插机构结构简单,可靠性高。
基于以上研究,在电驱式小区玉米膜上直插穴播机的基础上[14-16],针对“秋覆膜”和“顶凌覆膜”2种“先覆膜后播种”方式,为提高玉米播种机播深合格率和膜孔合格率,对前进速度补偿机构和限深机构进行研究,在筛选影响前进速度补偿机构作业性能参数的基础上,基于响应曲面法进行田间试验参数优化和验证。
1 整机机构与工作原理
1.1 整机结构
电驱式小区玉米电驱膜上直插穴播机主要由前轮、电动机、机架、排种器、前进速度补偿机构等组成,图1为结构示意图。为简化整机结构、减轻质量,同时考虑垄沟播种时沟内已覆土,平铺膜播种时膜孔较小,未增加膜上覆土装置。
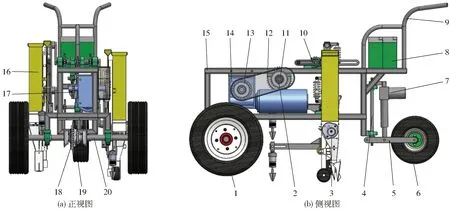
图1 电驱式小区玉米膜上直插穴播机结构图Fig.1 Electric driving plotmaize insert hill-drop planter on film1.前轮 2牙嵌式电磁离合器 3.漏播报警器 4、12.后轮转动轴 5.后轮连杆 6.后轮 7.直线推杆 8.蓄电瓶 9.把手 10.前进速度补偿机构 11.链轮Ⅱ 12.链轮Ⅲ 13.链轮Ⅰ 14.电动机 15.机架 16.排种器组件 17.链轮Ⅴ 18.链轮Ⅳ 19.差速器 20.前轮轴
1.2 工作原理
如图1所示,电驱式小区玉米膜上直插穴播机作业时,电动机驱动差速器,使整机以一定速率前进;与此同时,接通电磁离合器电源后,电动机将动力传递至前进速度补偿机构。前进速度补偿机构主要由转动导杆机构和平行四杆机构串联组成,通过转动导杆机构将主曲柄的匀速转动转化为导杆的非匀速,接着导杆驱动平行四杆机构的副曲柄,使穴播杆在向下运动过程中水平方向线速度与整机前进速度近似相等。排种器组件通过限深机构顶杆的上下运动拨动种轮板手来驱动种轮转动取种,当遇到坚硬地面或石块时前进速度补偿机构的弹簧阻尼器被压缩,鸭嘴得到保护;漏播时,安装在排种器组件上的漏播报警器报警,人工补种即可。
2 前进速度补偿机构和限深机构理论分析
2.1 前进速度补偿机构分析
电驱式玉米膜上直插穴播机的核心部件为前进速度补偿机构,主要由曲柄杆、滑槽、导杆、主动杆、从动杆和穴播杆等组成,图2为前进速度补偿机构。
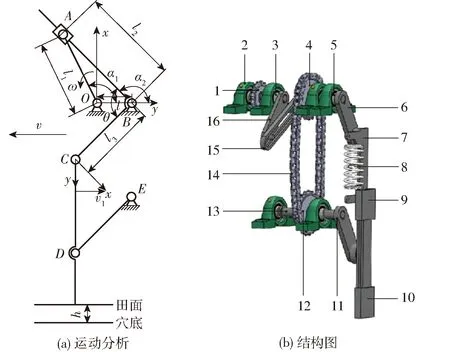
图2 前进速度补偿机构Fig.2 Forward speed compensation device1.链轮Ⅰ 2.UCP轴承 3.曲柄轴 4、12.链轮Ⅱ 5.导杆轴6.副曲柄 7.穴播杆 8.弹簧阻尼器 9.上滑块 10.下滑块 11.从动曲柄 13.从动曲柄轴 14.链条 15.导杆 16.主曲柄
以O为坐标原点,由图2a可得△AOB内角关系为
(1)
式中l1——主曲柄长度l2——AB点的距离α1——主曲柄与x轴的夹角α2——导杆与x轴的夹角
根据余弦定理,△AOB中AB的长度为
(2)
式中l——中心距
将式(2)代入式(1)得
(3)
其中
ε=l/l1
C点在穴播杆入土期间播种深度h和水平方向速度v1分别为
h=l3(1-cos(π-α2))
(4)
(5)
(6)
式中l3——副曲柄长度θ——导杆与副曲柄的夹角ω——主曲柄角速度h——播种深度v1——C点在x轴方向的分速度v——整机前进速度

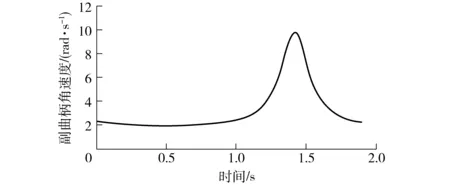
图3 副曲柄角速度变化曲线Fig.3 Angular velocity curve of side crank
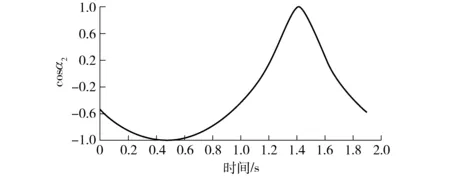
图4 导杆角位移余弦值变化曲线Fig.4 Variation curve of cosine of angular displacement of guide bar
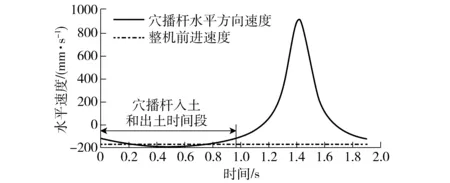
图5 穴播杆水平方向速度变化曲线Fig.5 Variation curve of horizontal velocity of hill-drop bar
2.2 限深机构分析
由于穴播机前轮轮距较小,受地面不平度影响较大,进而使排种器播种性能和播深合格率受到较大影响。播深一致使苗齐苗壮,为此设计了限深机构,限深机构结构如图6所示。
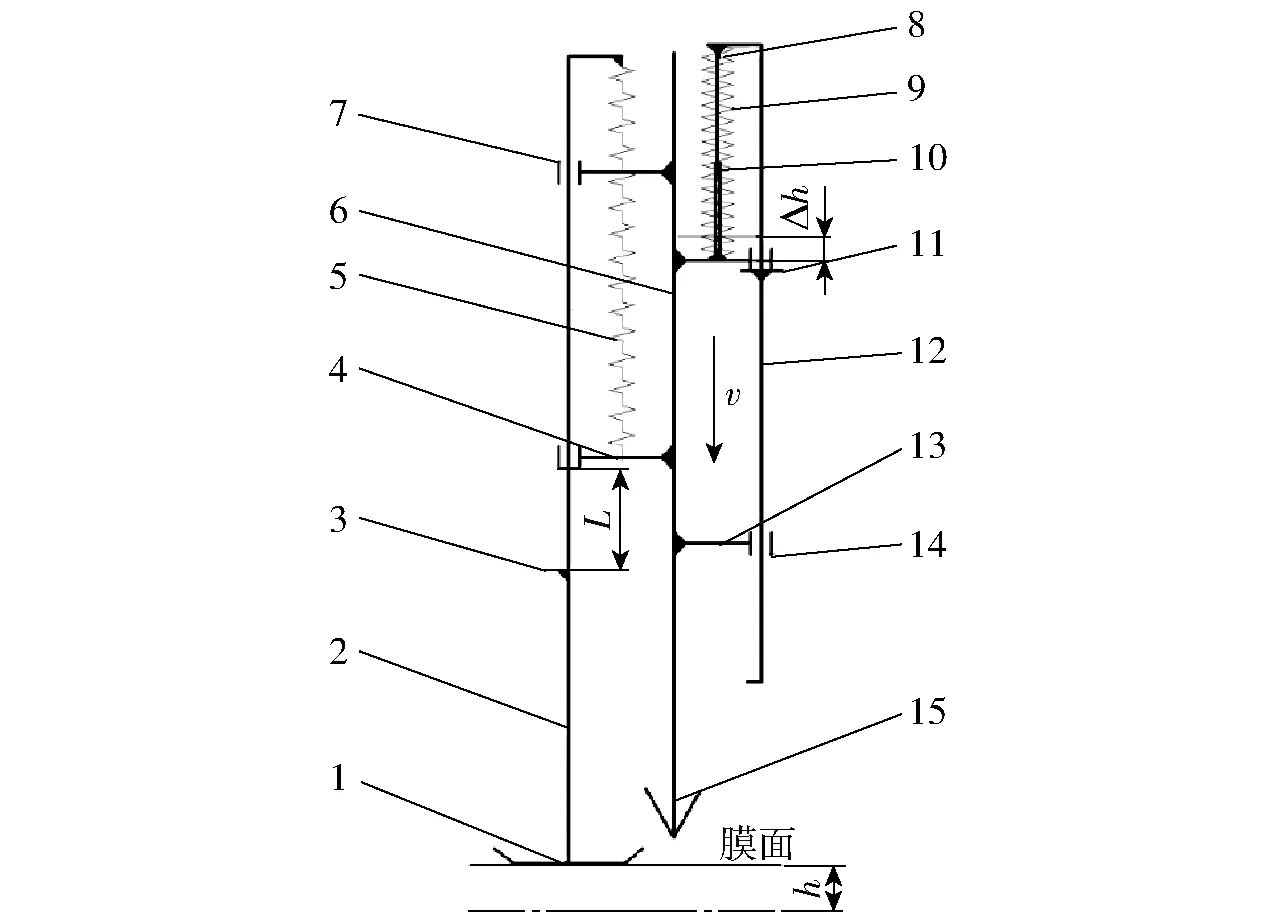
图6 限深机构结构示意图Fig.6 Sketch map of limited depth mechanism1.顶板 2.顶杆 3.限位块 4.连接杆Ⅰ 5.拉簧 6.穴播杆7.滑槽 8.滑杆 9.压簧 10.滑道 11.卡块 12.直杆 13.连接杆Ⅱ 14.滑块 15.鸭嘴
对图6分析得
(7)
式中L——拉簧变形最大工作行程,mmHmax——拉簧受最大载荷时的长度,mmH0——拉簧未受载时的长度,mmk——弹簧刚度,N/mmδmax——拉簧最大变形量,mmFmax——拉簧最大变形力,N
如图6所示,v为穴播杆垂直速度。限深机构拉簧主要作用是克服鸭嘴开口力、排种轮周期转动力及接触零部件摩擦力后将竖直方向错位的顶杆和穴播杆拉回原位,但拉簧变形最大工作行程L后的最大拉力较穴播杆的入土阻力小很多。播种深度一般为30~40 mm,取穴播深度h为35 mm,始终使限深机构低于理论高度Δh为20 mm,保证鸭嘴入土后始终位于h深,即当顶板小范围接触低于田面时,拉簧仅发生变形完成播种;当顶板小范围接触高于田面时,拉簧被拉伸到L后,限位块限制了顶杆和穴播杆之间的相对运动,顶杆和穴播杆同时向上运动,与此同时压簧被压缩,而鸭嘴入土深度h未改变。
3 试验
3.1 试验方法
电驱式玉米膜上直插穴播机田间播种性能试验于2016年4月19日在酒泉铸陇农机有限责任公司试验田进行。试验地地势平坦,南北走向、呈矩形,土壤为沙壤土,含水率为9.5%~15.4%,40 mm深处土壤坚实度平均值为12.16 MPa,地温平均值为14.5℃,玉米种植品种为陇单339号。按照NY/T 987—2006《铺膜穴播机作业质量》测定计算膜下播种深度合格率、膜孔合格率[17]。以500 mm长单膜为1个作业小区,测定点为小区内所有的穴孔,用长100 mm板尺测量种子深度,记录穴孔内的种数;利用卷尺量取膜孔与孔穴错开1/2 膜孔直径及以上的膜孔个数。直插穴播机的膜下播种深度合格率和膜孔合格率计算式为
(8)
(9)
式中f——膜孔总数bh——膜下播种深度合格穴数Hb——膜下播种深度合格率,%Y——膜孔合格率,%A——作业小区内膜孔与孔穴错开1/2膜孔直径的膜孔数
3.2 参数优化
3.2.1ω对穴播轨迹的影响
如图7所示,固定其他参数,改变主曲柄角速度ω。主曲柄角速度ω影响穴距、穴播杆入土和出土期间绝对位移。以田面为参考面,当ω增大时,穴距变大,穴播杆入土和出土2个动作点绝对水平位移变大;以田面为参考面,当ω减小时,穴距变小,穴播杆入土和出土期间绝对水平位移变大。
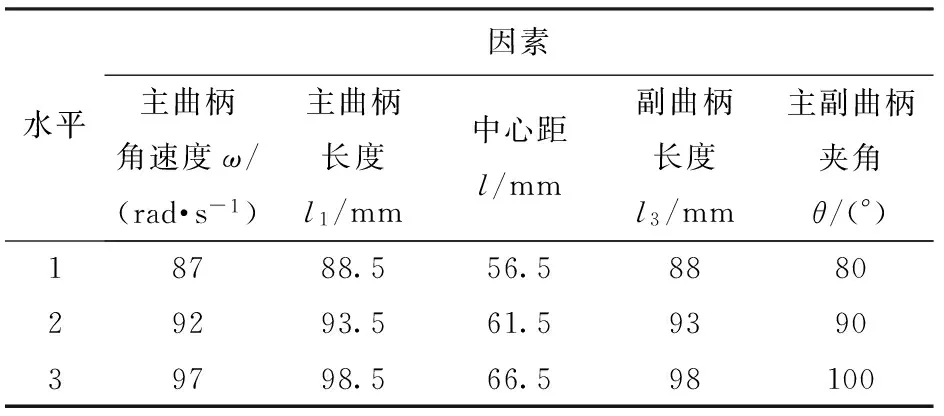
表1 因素水平Tab.1 Levels of factors
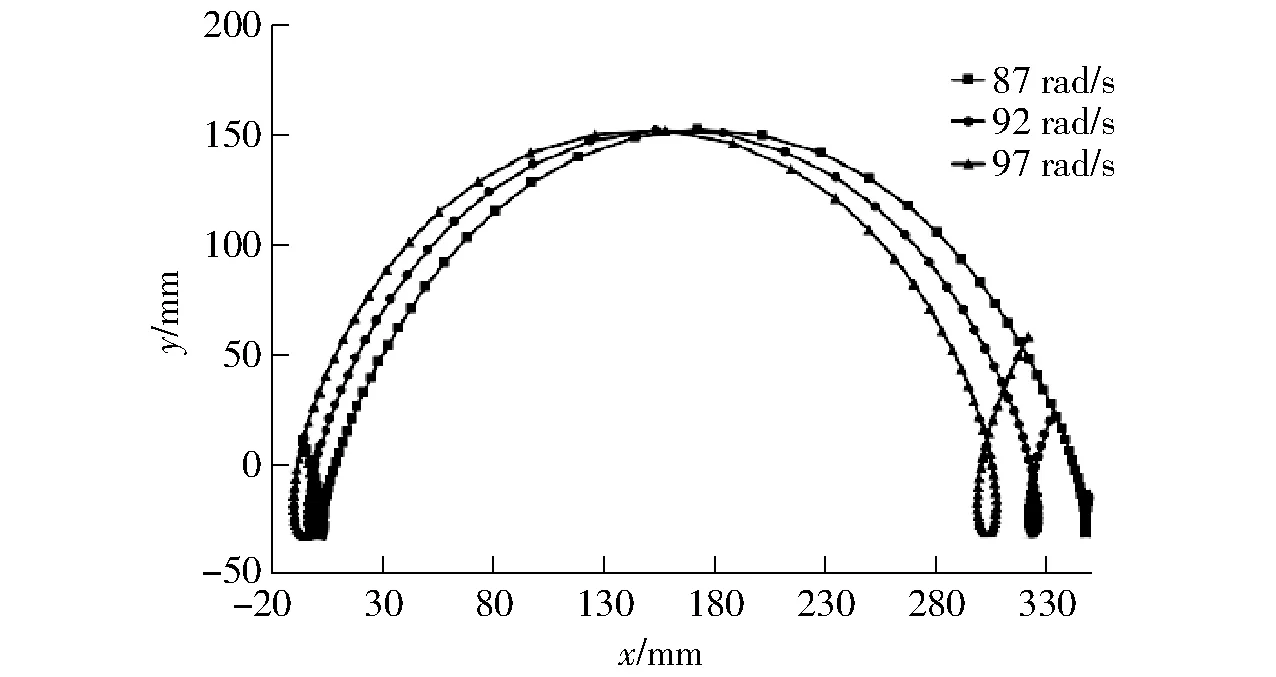
图7 ω对穴播轨迹的影响Fig.7 Effect of ω on trajectory of hole sowing
3.2.2l1对穴播轨迹的影响
同理,由图8可知,以田面为参考面,当l1增大时,穴距未变,穴播杆入土和出土期间绝对水平位移变大,限深变大;以田面为参考面,当l1减小时,穴距未变,穴播杆入土和出土期间绝对水平位移变小。
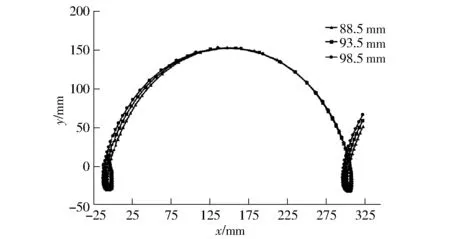
图8 l1对穴播轨迹的影响Fig.8 Effect of l1 value on trajectory of hole sowing
3.2.3l对穴播轨迹的影响
同理,由图9可知,以田面为参考面,当l增大时,穴距变小,穴播杆入土和出土期间绝对水平位移变大;以田面为参考面,当l减小时,穴距变大,穴播杆入土和出土期间绝对水平位移变小。
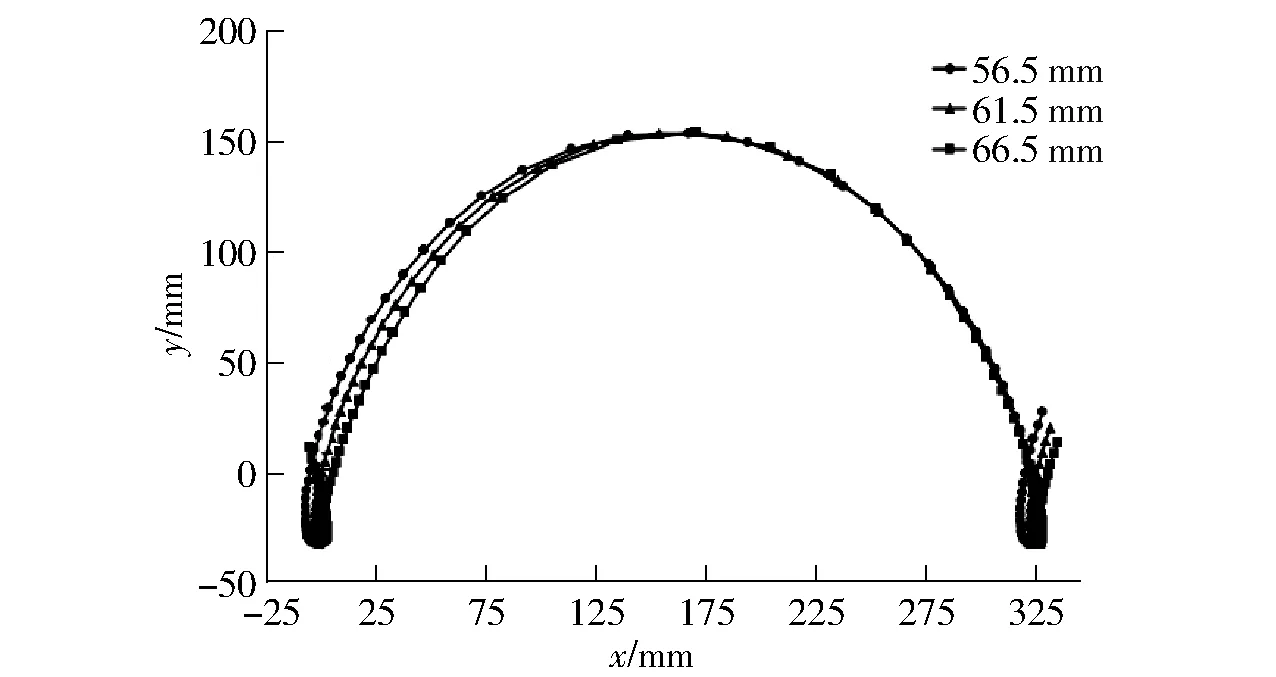
图9 l对穴播轨迹的影响Fig.9 Effect of l value on trajectory of hole sowing
3.2.4l3对穴播轨迹的影响
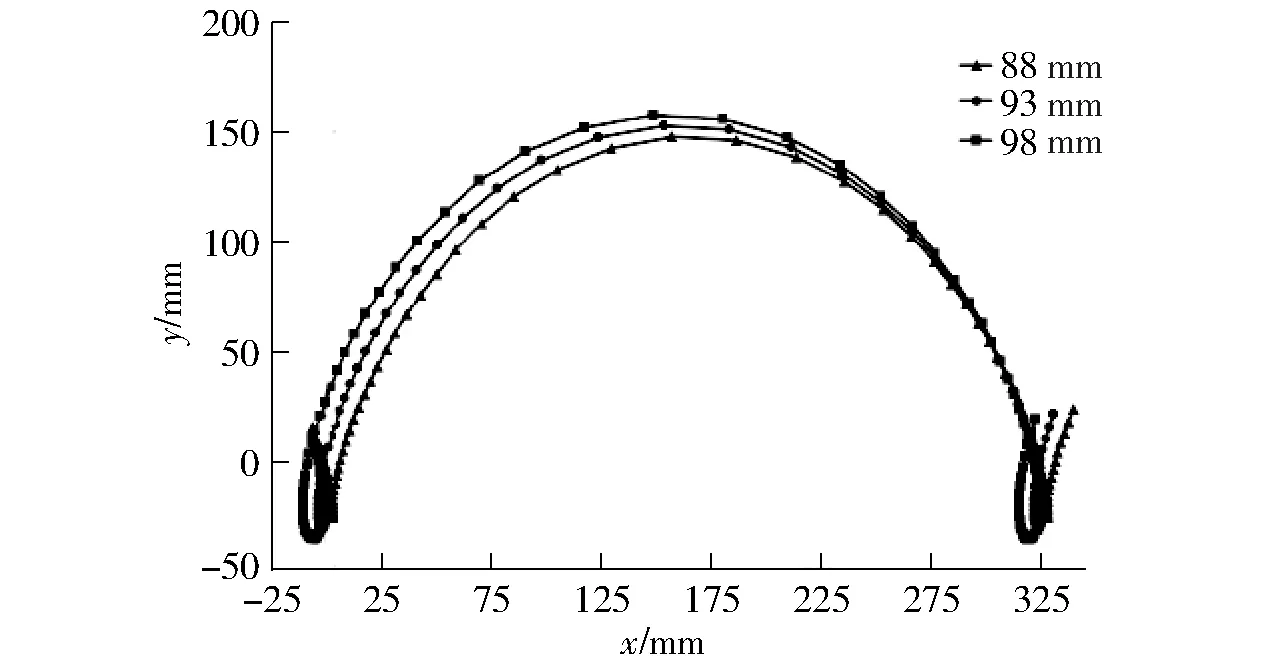
图10 l3对穴播轨迹的影响Fig.10 Effect of l3 value on trajectory of hole sowing
同理,由图10可知,以田面为参考面,当l3增大时,穴距变大,对称线左移,穴孔变深,穴播杆入土和出土期间绝对水平位移变大;以田面为参考面,当l3减小时,穴距变小,对称线右移,穴孔变浅,穴播杆入土和出土期间绝对水平位移变大。
3.2.5θ对穴播轨迹的影响
同理,如图11所示,以田面为参考面,当θ增大或减小时,穴距和穴孔深均未变,穴播杆入土和出土期间绝对水平位移变化均较小,无对称线。
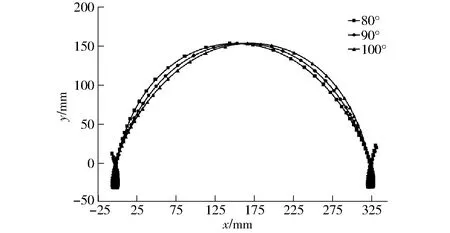
图11 θ对穴播轨迹的影响Fig.11 Effect of θ value on trajectory of hole sowing
由于膜孔合格率影响出苗的难易程度,膜下播种深度合格率影响苗齐苗壮,在满足播种性能农艺要求的基础上,优化前进速度补偿机构以期达到更佳的播种效果。由图7~11可直观筛选出主曲柄角速度ω、中心距l和副曲柄长度l33个因素对穴播轨迹影响较大。
3.3 回归试验
采用Box-Behnken设计模型能用较少的试验次数进行较全面的试验分析[18-19]。以主曲柄角速度ω、中心距l、副曲柄长度l3作为试验因素,以膜下播种深度合格率Y1和膜孔合格率Y2为响应值。各试验因素水平编码见表2,试验安排及结果见表3。X1、X2、X3为因素编码值。Y1为膜下播种深度合格率,Y2为膜孔合格率。
表2 优化后的因素编码Tab.2 Optimized coding of factors

表3 试验设计与结果Tab.3 Experimental design and results
3.3.1 结果分析
应用Design-Expert软件对Y1和Y2进行回归模型方差分析,如表4所示,分别得到Y1和Y2二次回归模型分别为
Y1=91.64-1.87X1-2.36X2+1.91X3+
0.35X1X2+0.20X1X3-0.23X2X3+
(10)
Y2=95.28-1.98X1-1.38X2+2.17X3+
0.30X1X2+1.00X1X3-0.50X2X3-
(11)
由表4分析可知,回归模型(10)的P<0.000 1,表明极显著;失拟项P>0.05,失拟不显著,说明模型(10)能正确反映Y1与X1、X2、X3之间的关系。根据模型各因素回归系数的大小,可得到影响播种深度合格率Y1的主次顺序为:X2、X3、X1。
同理,回归模型(11)的P<0.000 1,表明极显著;失拟项P>0.05,失拟不显著,说明模型(11)能正确反映Y2与X1、X2、X3之间的关系。根据模型各因素回归系数的大小,可得到影响播种深度合格率Y2的主次顺序为:X3、X1、X2。
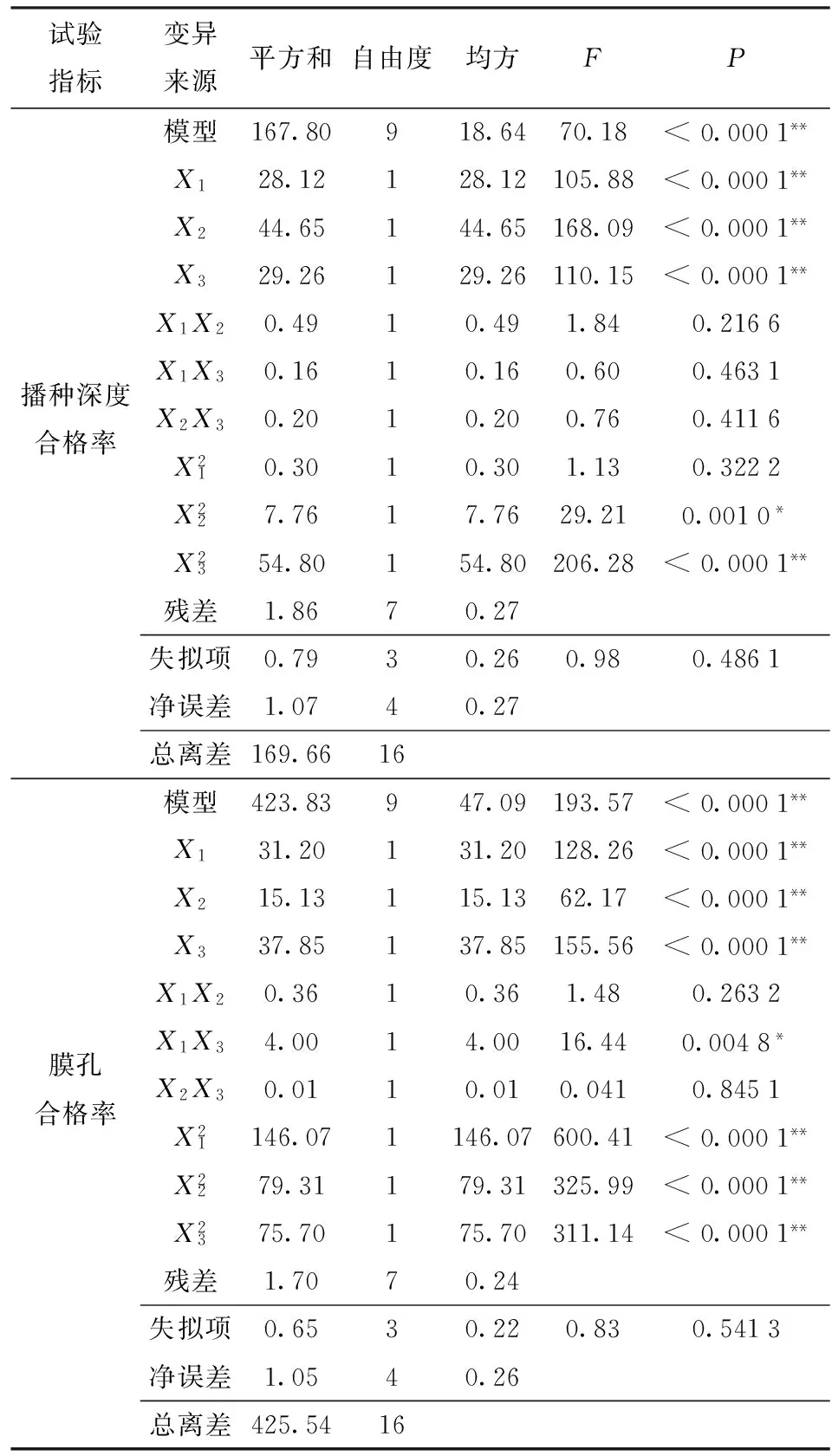
表4 回归模型方差分析Tab.4 Variance analysis of regression models
注:*表示显著;** 表示极显著。
3.3.2 各因素对指标的影响
由图12可知,当X3=0时,X1由-1变化到1时,即主动曲柄角速度由87 rad/s增大到97 rad/s,播种深度合格率Y1先增大后减小(图12a)。当X1固定在某一水平时,随X2增加,播种深度合格率呈逐渐减小趋势。由偏回归分析与等高线密度可知X2对播种深度合格率Y1的影响大于X1。当X2=0时,X1由-1变化到1时,即主动曲柄角速度由87 rad/s增大到97 rad/s,播种深度合格率Y1呈逐渐减小趋势(图12b),当X1固定在某一水平时,X3增加,播种深度合格率Y1先增大后减小。由偏回归分析与等高线密度可知X1对播种深度合格率Y1的影响大于X3。当X1=0时,X2由-1变化到1时,即中心距由56.5 mm增大到66.5 mm,播种深度合格率Y1先增大后减小(图12c)。X3固定在某一水平时,随X2增加,播种深度合格率Y1先增大后减小。由偏回归分析与等高线密度可知X3对播种深度合格率Y1的影响大于X2。
由图13可知,当X3=0时,X1由-1变化到1时,即主动曲柄角速度由87 rad/s增大到97 rad/s,膜孔合格率Y2先增大后减小(图13a)。当X1固定在某一水平时,随X2由-1变化到1,播种深度合格率Y2先增大后减小。由偏回归分析与等高线密度可知X1对播种深度合格率Y2的影响大于X2。当X2=0时,X1由-1变化到1时,即主动曲柄角速度由87 rad/s增大到97 rad/s,膜孔合格率Y2先增大后减小(图13b)。X1固定在某一水平时,随X3由-1变化到1,播种深度合格率Y2先增大后减小。由偏回归分析与等高线密度可知X1对播种深度合格率Y2的影响大于X3。当X1=0时,X2由-1变化到1时,即中心距由56.5 mm增大到66.5 mm,膜孔合格率Y2先增大后减小(图13c),当X2固定在某一水平时,随X3由-1变化到1,膜孔合格率Y2先增大后减小。由偏回归分析与等高线密度可知X2对播种深度合格率Y2的影响大于X3。
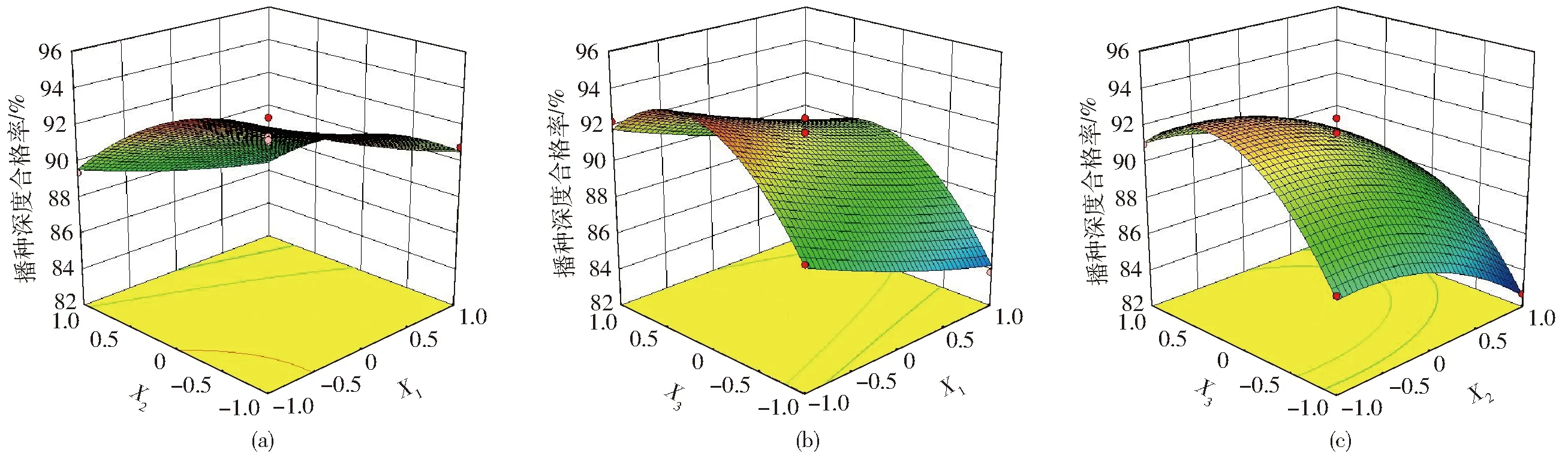
图12 交互因素对播种深度合格率Y1的影响曲面Fig.12 Impact surface of interactive factors on seed depth of film under the qualified rate Y1

图13 交互因素对膜孔合格率Y2的影响曲面Fig.13 Impact surface of interactive factors on pass rate of film hole Y2
3.4 试验验证
借助Design-Expert软件优化工具箱对回归模型式(10)、(11)进行参数优化,最优试验参数为:ω=89.10 rad/s、l=58.55 mm、l3=95.1 mm。为了验证优化结果下速度补偿机构工作时膜下播种深度合格率和膜孔合格率,依据上述试验方法进行了5次田间试验,得到Y1和Y2均值分别为94.89%和93.61%。同时试验过程表明前进速度补偿机构运行平稳可靠;排种器鸭嘴插膜口小,穴孔和膜孔无错位,试验效果满足相关播种机试验标准要求。田间作业效果如图14所示。

图14 样机田间试验Fig.14 Field test of prototype
4 结论
(1)采用转动导杆驱动平行四杆机构的水平速度补偿机构,当主动曲柄的角速度为89.10 rad/s、中心距为58.55 mm、副曲柄长度为95.1 mm时,大田试验表明穴播杆在穴播时穴孔小、穴孔和膜孔无错位。
(2)应用Matlab软件仿真前进速度补偿机构各参数对穴播轨迹的影响,并筛选出主曲柄角速度、中心距和副曲柄长度对膜下播种深度合格率和膜孔合格率影响显著,主曲柄长度和初始角影响不显著。在主动曲柄的角速度为89.10 rad/s、中心距为58.55 mm、副曲柄长度为95.1 mm条件下,田间试验中播种深度合格率和膜孔合格率的平均值分别为94.89%和93.61%。试验效果满足相关播种机试验标准要求。
1 杨祁峰,刘广才,熊春蓉,等.旱地玉米全膜双垄沟播技术的水分高效利用机理研究[J]. 农业现代化研究,2010,31(1):113-116. YANG Qifeng, LIU Guangcai, XIONG Chunrong, et al. Study on highly efficient water utilizing mechanisms on techniques of whole plastic-film mulching on double ridges and planting in catchment furrows of dry-land maize[J]. Research of Agricultural Modernization, 2010, 31(1): 113-116. (in Chinese)
2 陈学庚,卢勇涛. 气吸滚筒式棉花精量穴播器排种性能试验[J]. 农业机械学报,2010,41(1):35-38. CHEN Xuegeng, LU Yongtao. Sowing-performance of air-suction cylindrical cotton precision dibble[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(1): 35-38. (in Chinese)
3 刘晓伟,何宝林,郭天文,等. 秋覆膜对旱地玉米土壤水分和产量的影响[J]. 农学学报,2011,1(8):9-15. LIU Xiaowei, HE Baolin, GUO Tianwen, et al. Effects of full mulching on double ridges in autumn on soil water content and yield of dryland maize[J]. Journal of Agriculture, 2011, 1(8): 9-15. (in Chinese)
4 刘淑梅,于宏,柳芳. 早春顶凌覆膜土壤水分变化规律初探[C]∥全国农业气象与生态环境学术年会,2006.
5 王吉奎,郭康权,吕新民,等.改进型夹持式棉花穴播轮排种过程高速摄像分析[J]. 农业机械学报,2011,42(10):74-78. WANG Jikui, GUO Kangquan,LÜ Xinmin, et al. High-speed photography analysis on operating process of improved clamping dibbler for cotton[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(10): 74-78. (in Chinese)
6 王吉奎,郭康权,吕新民. 夹持式穴播轮种子室内种子运动分析[J].农业工程学报,2012,28(11):35-39. WANG Jikui, GUO Kangquan, LÜ Xinmin. Analysis on seed movement in seed chamber of clamping dibber wheel[J]. Transactions of the CSAE, 2012, 28(11): 35-39. (in Chinese)
7 陈晓光,左春柽,高峰. 直插式播种机的研究-Ⅰ. 直插式成穴器[J]. 农业工程学报,1993,9(3):66-77. CHEN Xiaoguang, ZUO Chuncheng, GAO Feng. Study on the direct insert planter(Ⅰ) the research and the principal study of the direct insert hole former of planter[J]. Transactions of the CSAE, 1993, 9(3): 66-77. (in Chinese)
8 刘军干,王天辰,阎发旭,等. 直插式覆膜小麦穴播机的设计[J]. 农业工程学报,2001,17(5):55-58. LIU Jungan, WANG Tianchen, YAN Faxu, et al.Design of film-mulching wheat hill seeder with vertical dropping mechanism[J]. Transactions of the CSAE, 2001, 17(5): 55-58. (in Chinese)
9 魏宏安,邵世禄. 垂直插入式小麦覆膜穴播机的研究[J]. 农业机械学报,2001,32(6):34-37. WEI Hongan, SHAO Shilu. Study on wheat hill-drop planter used for perpendicularly inserting film mulching field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2001, 32(6): 34-37. (in Chinese)
10 赵建托,赵武云,任颜华,等. 玉米全膜覆盖双垄沟播机直插式播种装置设计与仿真[J]. 农业机械学报,2010,41(10):40-43. ZHAO Jiantuo, ZHAO Wuyun, REN Yanhua, et al.Design and simulation of direct insert corn planting device of furrow seeder with whole plastic-film mulching on double ridges[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 40-43. (in Chinese)
11 赵武云,戴飞,杨杰,等.玉米全膜双垄沟直插式精量穴播机设计与试验[J/OL]. 农业机械学报,2013,44(11):91-97. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131117&journal_id=jcsam.DOI: 10.6041/j. issn.1000-1298.2013.11.017. ZHAO Wuyun, DAI Fei, YANG Jie, et al. Design and experiment of direct insert precision hill-seeder with corn whole plastic-film mulching on double ridges[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 91-97. (in Chinese)
12 戴飞,赵武云,石林榕,等. 基于近等速机构的玉米全膜双垄沟穴播机设计与试验[J/OL]. 农业机械学报,2016,47(11):74-81. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161110&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.11.010. DAI Fei, ZHAO Wuyun, SHI Linrong, et al. Design and experiment of hill-seeder with whole plastic-film mulching on double ridges for corn based on mechanism with approximate constant speed[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 74-81. (in Chinese)
13 石林榕,赵武云,孙伟,等. 电驱式小区玉米膜上直插穴播机的研制与试验[J/OL]. 农业工程学报,2017,33(4):32-38. http:∥www.tcsae.org/nygcxb/ch/reader/create_pdf.aspx?file_no=20170405&flag=1&journal_id=nygcxb&year_id=2017.DOI: 10.11975/j.issn.1002-6819.2017.04.005. SHI Linrong, ZHAO Wuyun, SUN Wei, et al. Development and experiment of electric driving insert hill-drop planter on film for plot corn[J/OL]. Transactions of the CSAE, 2017, 33(4): 32-38. (in Chinese)
14 赵武云,吴建民,王芬娥,等. 旱地玉米全膜覆盖双垄沟播精密播种机:中国,200910022858.7[P]. 2011-07-20.
15 赵武云,戴飞,张锋伟,等. 全膜双垄沟玉米种植全程机械化作业方法:中国,201310492318.1[P]. 2015-04-01.
16 石林榕,吴建民,赵武云,等. 一种直插式成穴机构:中国,201420489531.7[P]. 2014-12-10.
17 NY/T 987—2006 铺膜穴播机作业质量[S]. 2006.
18 徐向宏,何明珠. 试验设计与Design-Expert、SPSS应用[M]. 北京:科学出版社,2010.
19 袁雪,祁力钧,王虎,等. 温室摇摆式变量弥雾机喷雾参数响应面法优化[J/OL]. 农业机械学报,2012,43(4):45-50, 54. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20120410&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2012.04.010. YUAN Xue, QI Lijun, WANG Hu, et al. Spraying parameters optimization of swing, automatic variables and greenhouse mist sprayer with response surface method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4): 45-50, 54. (in Chinese)
Parameters Optimization of Speed Compensation Mechanism of Electric Driving Maize Planter with Dibbling on Membrane
SHI Linrong1ZHAO Wuyun1SUN Wei1LI Rongbin2SUN Bugong1
(1.MechanicalandElectricalEngineering,GansuAgriculturalUniversity,Lanzhou730070,China2.JiuquanZhulongMachineryManufacturingCo.,Ltd.,Jiuquan735000,China)
To increase the qualified rate of sowing depth and the qualified rate of film hole for electric driving maize planter with dibbling on membrane, forward speed compensation device and limited depth mechanism were calculated. With Matlab impact of parameters of speed compensation mechanism on dibbling trajectory were simulated. Screening out that crank angular velocity, center distance and assistant crank length have significant impact on qualified rate of sowing depth and the qualified rate of film hole. According to response surface method with 3 factors and 3 levels, multi-factor variance analysis was conducted. Results showed that influence on the qualified rate of sowing depth was order, center distance, assistant crank length and crank angular velocity, and influence on qualified rate of film hole was order, assistant crank length, crank angular velocity and center distance. To get maximizing the qualified rate of sowing depth and the qualified rate of film hole, optimal parameters was that crank angular velocity was 89.10 rad/s, center distance was 58.55 mm, and assistant crank length was 95.1 mm. Under that condition, the qualified rate of sowing depth and the qualified rate of film hole respectively was 94.89%, 93.61%. Test process showed that speed compensation mechanism run smoothly and reliably, and results met standard requirements related to seeder and agricultural requirements for maize planting in Gansu.
maize; hill planter; speed compensation mechanism; parameter optimization
10.6041/j.issn.1000-1298.2017.08.009
2017-03-18
2017-06-11
国家自然科学基金项目(51405086、51665001)、公益性行业(农业)科研专项(201503105)、甘肃省自然科学基金项目(1610RJZA088)、甘肃省高等学校科研项目(2016B-039)和甘肃农业大学盛彤笙科技创新基金项目(GSAU-SLS-1623)
石林榕(1983—),男,助教,主要从事西北旱区农业工程技术与装备研究,E-mail: getmao@qq.com
赵武云(1966—),男,教授,博士生导师,主要从事农业工程技术与装备研究,E-mail: zhaowy@gsau.edu.cn
S223.2
A
1000-1298(2017)08-0087-08