单侧筑埂机镇压筑埂装置工作动力学参数测试与试验
2017-08-31王金峰林南南王金武黄会男沈红光杨文盼
王金峰 林南南 王金武 黄会男 沈红光 杨文盼
(东北农业大学工程学院, 哈尔滨 150030)
单侧筑埂机镇压筑埂装置工作动力学参数测试与试验
王金峰 林南南 王金武 黄会男 沈红光 杨文盼
(东北农业大学工程学院, 哈尔滨 150030)
为获得筑埂作业时土壤对其关键部件镇压筑埂装置的作用力,以1DSZ-350型悬挂式水田单侧旋耕镇压修筑埂机筑埂装置为研究载体,采用应变传感器设计了镇压筑埂装置动力学参数测试系统,并搭建动力学测试试验台。对镇压筑埂装置的工作参数进行测试,以镇压筑埂装置前进速度和转速为试验因素,以田埂成型过程中土壤对弹性羽片作用力和田埂坚实度为性能指标进行单因素试验,获得弹性羽片受土壤作用力、田埂坚实度与镇压筑埂装置前进速度、转速之间的关系。试验结果表明:当镇压筑埂装置转速一定时,随着机具前进速度的增加,土壤对弹性羽片作用力平均值增大,田埂坚实度减小,变化范围分别为:2 838.1~5 695.2 N和2 250~1 680 kPa;当机具前进速度一定时,随着镇压筑埂装置转速的增加,土壤对弹性羽片的作用力平均值与所筑田埂坚实度均增大,变化范围分别为:3 203.8~5 990.3 N和1 460~2 180 kPa。经试验验证,工作参数测试系统的设计符合实际要求,为类似结构装置的相关参数测试提供了参考。
筑埂机; 镇压筑埂装置; 动力学测试; 试验
引言
我国水稻种植需对大量水田进行灌溉和修筑田埂。田埂是水稻田间修筑的梯形土堤,用来分界和蓄水。筑埂是水稻生产过程中的耕整地环节,是水稻生产机械化的重要组成部分[1-2]。现阶段国内外学者对田埂的成型方法进行了一系列研究,张道林等[3]研制的1ZX-1型筑埂机,利用与梯形田埂相吻合的振压成型轮对田埂进行压实,主要依靠成型轮自身质量进行压实,设计的振压轮具有较大的质量;田丽梅等[4]针对镇压辊作业时的土壤粘附现象,设计出仿生的镇压辊,但这种镇压辊加工成本较高,镇压后土壤的紧实度不均匀、滚动阻力较大。郭志军等[5]对不同触土工作部件的力学特性进行性能研究,结果表明耕作部件触土曲面准线和纵深比是影响工作阻力的2个重要因素。李宁等[6]设计研究的1ZG-320型水田筑埂机,通过筑埂轮上的筑埂盘片和筑埂辊对土壤进行压实,筑埂轮按照田埂的外形设计,但田埂的坚实度难以保证。镇压筑埂装置在实际作业时,会与土壤产生相对摩擦,并将关系到动力学研究,但现有文献中很少有关于镇压筑埂装置在工作过程中动力学参数测定的相关报道。
本文以1DSZ-350型悬挂式水田单侧旋耕镇压修筑埂机为基础,以镇压筑埂装置为研究载体,综合分析镇压筑埂装置的结构、作业参数和土壤条件,设计镇压筑埂装置工作参数的动力学测试试验台,测试其相关动力学参数,利用传感器测试原理,获得在满足田埂坚实度的要求下,土壤对镇压筑埂装置弹性羽片作用力的变化规律,建立数学模型,以探究镇压筑埂装置在修筑田埂时,土壤与弹性羽片作用力、田埂坚实度与镇压筑埂装置工作参数之间的关系,为整机设计及动力学求解提供试验基础。
1 镇压筑埂装置动力学参数分析
1.1 镇压筑埂装置的结构设计
镇压筑埂装置主要由10片大小、形状相同的弹性羽片(以下简称羽片)和压土辊组成,如图1所示。组合的羽片侧面与所修筑田埂的侧面相吻合,能更好地修筑田埂,确保其形状;相邻羽片之间呈台阶式均匀地叠加分布在镇压筑埂装置的整个圆周上,在均衡了镇压筑埂装置附着性与耐磨性的同时起到一定的振动压实作用。

图1 镇压筑埂装置结构示意图Fig.1 Structure diagram of compacting ridge device1.弹性羽片 2.压土辊
由于筑埂机在潮湿、松软且土壤含水率较高的水田田间作业,当镇压筑埂装置上叠加的羽片旋转接触到土壤时,在其表面与土壤间切向力的作用下,羽片产生较大的切向弹性变形,随着切向力的增加,切向变形相应增大,进一步增强了羽片与土壤接触面间的“摩擦作用”,进而通过镇压筑埂装置自身重力和旋转动力将土壤压实成具有一定形状和一定坚实度的田埂,并且羽片的叠加对田埂侧面实现周期性的振动拍打,进一步提高了所筑田埂的坚实度,满足水田作业实际的农艺要求[7-9]。
根据文献[10],水田田埂标准上顶宽为300~400 mm,田埂高度为250~350 mm,下底宽为650~750 mm。结合农艺要求,设计镇压筑埂装置的结构参数为:压土辊直径180 mm,镇压筑埂装置外圆直径800 mm,羽片厚度4 mm,单个羽片弯折角度150°。
1.2 镇压筑埂装置的动力学分析
镇压筑埂装置作业时由变速箱驱动作回转运动,当镇压筑埂装置匀速前进时,其受力情况如图2所示。

图2 镇压筑埂装置受力分析示意图Fig.2 Stress analysis of compacting ridge device
设压土辊的长度为C,羽片和压土辊的厚度为s,压土辊的重力为W1,羽片组合体的重力为W2,则
W1=2πr1Csgρ
(1)
W2=2π(r1+r2)L1sρg+2π(r2+r3)Lsρg
(2)
式中ρ——镇压筑埂装置材料密度,kg/m3r1——压土辊半径,mmr2——羽片弯折点绕z轴转动回转半径,mm
r3——羽片端点绕z轴转动的回转半径,mm
L1——羽片第Ⅰ段弯折区长度,mm
L——羽片第Ⅱ段弯折区长度,mm
为保证镇压筑埂装置能够向前滚动且无滑动,应满足条件
Md>N1e+R1h+R2k+R3l+Mf
(3)
R1+R2+R3>T
(4)
其中R1=μ1N1R2=μ2N2sinθR3=μ3N3sinθ3
式中Md——镇压筑埂装置主动力矩,N·mmT——机具对镇压筑埂装置的作用力,NMf——轴承的摩擦力矩,N·mmR1——压土辊与土壤接触产生的摩擦力,NR2——羽片第Ⅰ段弯折区与土壤接触产生的摩擦力,N
R3——羽片第Ⅱ段弯折区与土壤接触产生的摩擦力,N
N1——土壤对压土辊的压力,N
N2——土壤对羽片第Ⅰ段弯折区的压力,N
N3——土壤对羽片第Ⅱ段弯折区的压力,N
e——N1作用点到y轴的距离,mm
h——R1作用点到x轴的距离,mm
k——R2作用点到x轴的距离,mm
l——R3作用点到x轴的距离,mm
θ——羽片第Ⅰ段弯折区与压土辊端面的夹角,(°)
θ3——羽片第Ⅱ段弯折区与第Ⅰ段弯折区端面夹角,(°)
μ1——土壤与压土辊之间的摩擦因数
μ2——土壤与羽片第Ⅰ段弯折区的摩擦因数
μ3——土壤与羽片第Ⅱ段弯折区的摩擦因数
羽片与土壤接触面产生的摩擦力和土壤对羽片的作用力需要通过试验获得,土壤反作用力的测取对镇压筑埂装置的强度校核、材料的选择及结构的优化意义重大,所以为了研究土壤反作用力的变化规律,设计镇压筑埂装置工作参数动力学测试系统。通过对镇压筑埂装置进行动力学测试,为镇压筑埂装置结构的优化和整机结构设计提供参考依据。
2 镇压筑埂装置工作动力学参数测试系统
镇压筑埂装置在修筑田埂实际过程中,由于其外侧旋转接触土壤,土壤对其产生一定的摩擦力,因此,在动力学测试时很难将测试应变片粘贴在镇压筑埂装置与土壤直接接触一侧上。羽片由平行于轴曲线的众多纵向纤维组成,在发生弯曲变形时必然会引起靠近羽片内侧的纤维伸长,靠近外侧的纤维缩短,所对应的伸长量与缩短量大小相等。为了测试数据的稳定,选择将应变片粘贴在镇压筑埂装置内壁背离土壤一侧,组成惠斯通全桥电路,通过感应的电压变化量得到羽片受土壤作用力的变化情况。
2.1 动力参数测试系统设计
2.1.1 试验仪器
试验仪器包括由东方振动和噪声技术研究所生产的型号为INV3018C-24的8通道信号采集仪与INV1861A型便携式应变调理仪共同组成的信号采集处理系统;深圳市森瑞普电子有限公司生产的24通道过孔集流环连接传感器导线,有利于信号的传递和防止连线缠绕。信号采集仪配有DASP-10软件,便于输出数据和曲线。
将镇压筑埂装置工作动力学参数测试系统与土槽车连接,利用土槽车控制镇压筑埂装置前进速度和转速,如图3所示。

图3 镇压筑埂装置工作动力学参数测试系统Fig.3 Test system of kinetic parameters of compacting ridge device1.TCC-Ⅲ型计算机监控辅助测试试验土槽牵引车 2.三点悬挂装置 3.镇压筑埂装置 4.过孔集流环 5.INV1861A型便携式应变调理仪 6.INV3018C-24型数据采集仪 7.计算机
当镇压筑埂装置修筑田埂时受到土壤的作用力并使弹性羽片产生微小变形时,应变片传感器组将变化的电压信号传至集流环,通过集流环将信号传递到INV1861A型便携式应变调理仪上,经INV3018C-24型数据采集仪传至上位机配套的DASP-10软件获得相应的应变曲线,分析作业过程中羽片受到土壤作用力的变化情况。
图4所示为工作参数测试系统信号流图,测试过程中,首先对镇压筑埂装置羽片进行应变片的粘贴,为了获得较高的测试灵敏度,应用全桥测试电路,依照单侧镇压筑埂装置作业时的实际工作状况,对羽片受土壤作用力进行测试。
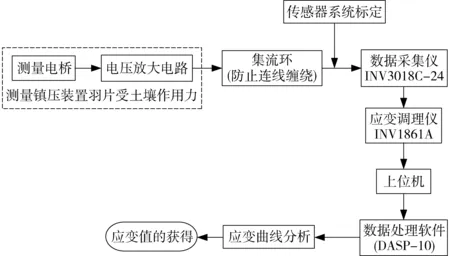
图4 工作参数测试系统信号流图Fig.4 Signal flow chart of test system of operating parameters
2.2 传感器设计
通过对镇压筑埂装置羽片的受力分析,选用单轴式应变片。考虑羽片的应力分布状态、作用力区域变化范围等因素,为获得较高的测试精度,正确地反映出被测点的真实应变,选用栅长尺寸较小的BX120-5AA型应变片[11],其主要参数为:电阻(120±0.2)Ω,敏感栅尺寸5 mm×3 mm,灵敏系数(2.08±0.1)%。
为保证测试的精确性,设计的信号采集系统由5组BX120-5AA型应变片全桥式连接而成。由于镇压筑埂装置在修筑田埂过程中,所筑田埂呈梯形,田埂侧面对田埂的坚实度与稳定性起到重要的作用,因此,选用田埂中性面进行受力测试,应变片的布片位置位于镇压筑埂装置羽片外边缘至其半径突变处的中心位置,采用划线方式进行标准的定位并标号,如图5所示。

图5 镇压筑埂装置应变片分布示意图Fig.5 Distribution diagram of strain gauge of compacting ridge device
传感器电桥连接方式如图5a所示, R1、R2、R3、R4为相互补偿的工作片,U1和U2分别为输入和输出电压,通过电压的变化反映镇压筑埂装置羽片的应变,由于镇压筑埂装置采用10片大小、形状相同的羽片叠加而成,为了充分证明测试的广泛性及减少相邻羽片间测试信号的干扰,通过间隔式布片方式对5片羽片进行应变片的粘贴,图5b为应变片贴片实物图。
2.3 镇压筑埂装置测试系统的标定
对梨花女子大学的课程设置进行分析,其中通识必修课程36学分,专业基础课程22学分,专业深化课程60学分,专业必修课程9学分。在梨花女子大学教育工程学又分为不同的方向,每个方向学习的具体课程又有所不同。
为确保测试的正确性和准确性,减少测试过程中的系统误差,在进行试验之前需对传感器进行静态标定,确定标定曲线、灵敏度和各项交叉干扰度。
图6所示为静止状态下镇压筑埂装置动力学测试系统的标定。标定时,将镇压筑埂装置安装在筑埂机上,借助土槽车的三点悬挂将其升起离地面一定高度,并保持相对稳定。在被测羽片应变片粘贴位置的中心处,按土壤对羽片作用力的方向布置一根低弹性的线,通过调节线的方向与角度保持其与被测羽片垂直,模拟土壤对羽片作用力的实际方向。采用逐级加载法进行加载,开启数据采集系统,逐级添加砝码,每增加一个砝码产生力F的增量ΔF。最后取力和应变增量的平均值计算理论值,寻找应变和力之间的对应关系。

图6 镇压筑埂装置测试系统标定Fig.6 Calibration diagram of test system of compacting ridge device
对采集的数据进行分析,得到的标定数据如表1所示。
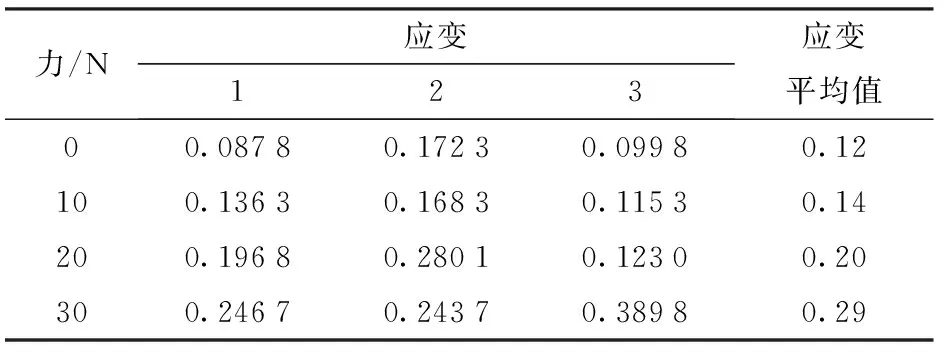
表1 镇压筑埂装置测试系统标定试验数据Tab.1 Test data of calibration of test system of compacting ridge device
根据表1中的测试数据,得到施加力与应变平均值之间的变化关系,如图7所示。施加力与应变平均值之间的关系式为
A=0.005b+0.102
(5)
式中A——应变平均值b——加载力,N
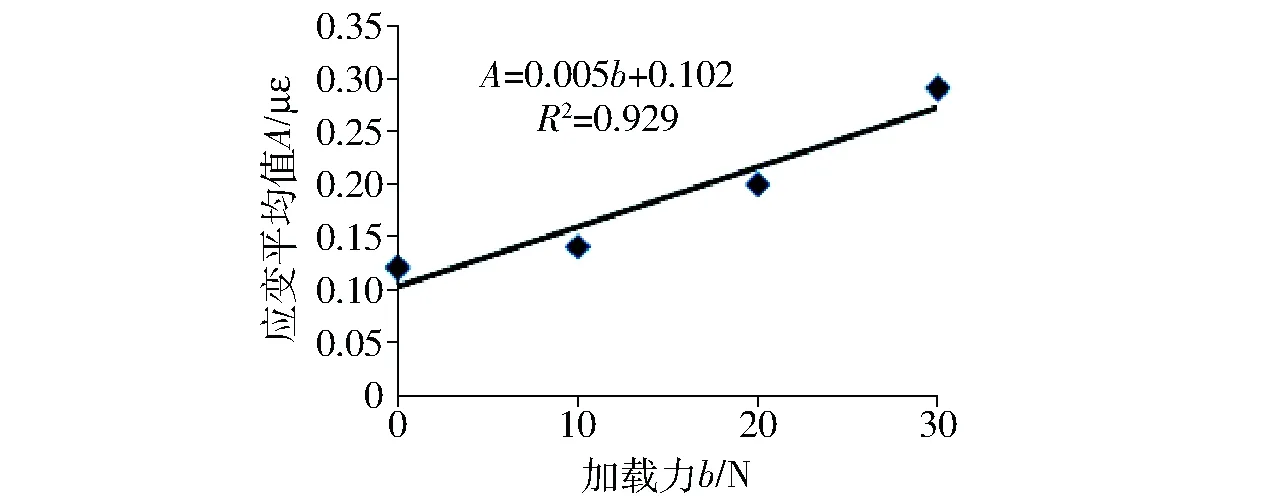
图7 加载力与应变平均值关系曲线Fig.7 Relationship curve between loading force and strain mean value
应用式(5)可将仪器测量值转换为镇压筑埂装置工作过程中土壤对羽片的作用力。
3 土槽试验
3.1 试验材料与方法
本次试验在黑龙江省农业机械工程科学研究院土槽实验室内进行,为便于动力学参数的测定,根据水田的土壤状况,处理土槽土壤坚实度为130~200 kPa,含水率为20%~30%。
为分析不同工作参数下镇压筑埂装置羽片受土壤作用力变化规律,本文进行单因素试验,选取镇压筑埂装置前进速度和转速为试验因素,土壤对羽片作用力和田埂坚实度为性能指标。
3.2 镇压筑埂装置应变测试曲线分析
试验时,镇压筑埂装置修筑田埂时受到土壤的作用力使弹性羽片产生微小变形,通过动态应变仪实时传至上位机,运用DASP-10软件显示相应的受力波形,获得应变与运动时间之间的变化曲线。
对测试得到的应变曲线加以分析,图8所示为机具前进速度0.8 km/h和镇压筑埂装置转速320 r/min,采样时间为2.0~4.5 s时,获得1~5号羽片的应变曲线。分析可得,镇压筑埂装置旋转一周时,由于羽片与土壤接触产生应变的变化,测试羽片受土壤作用力从零增加到最大再逐渐减小到零,因此,土壤对羽片的作用力只存在于羽片与土壤接触这段时间。

图8 镇压筑埂装置1~5号羽片受土壤作用力应变曲线Fig.8 Strain curves of soil on pinnae 1~5 of compacting ridge device
图9为5号羽片应变曲线,应变周期约0.4 s。一个周期前0.2 s测试羽片未与土壤接触,应变在一个稳定值附近波动,后0.2 s羽片瞬间与土壤产生接触,应变随着接触面积的增加应变值逐渐变大。

图9 镇压筑埂装置5号羽片受土壤作用力应变曲线Fig.9 Strain curve of force of soil on pinna 5 of compacting ridge device
由于后一个羽片开始接触土壤时,前一羽片尚未完全脱离土壤,相邻测试羽片之间产生了力的扰动,导致应变峰值有一个瞬间跳跃阶段,羽片入土最深、接触面积最大时产生的应变最大,羽片出土应变的变化与入土过程恰好相反。由式(5)可知,羽片在与土壤接触面积最大且入土最深时受到土壤的作用力最大。
4 试验结果与分析
4.1 前进速度对羽片受土壤作用力和田埂坚实度的影响
当镇压筑埂装置转速为320 r/min,前进速度为0.4、0.6、0.8、1.0、1.2 km/h时,土壤对羽片作用力平均值和田埂坚实度,如表2所示。

表2 不同前进速度下羽片受土壤作用力平均值与田埂坚实度Tab.2 Average values of force of soil on pinna and ridge solidity at different forward speeds
试验结果表明,随前进速度的增加,羽片受土壤作用力平均值增大,田埂坚实度减小。当前进速度为0.8~1.2 km/h时,羽片受土壤作用力平均值增加和田埂坚实度降低的趋势均比前进速度为0.4~0.8 km/h时较为缓慢。
土壤对羽片作用力随前进速度变化的回归方程为
y=-3 051x2+8 365x+6.76 (R2=0.996)
(6)
田埂坚实度随前进速度变化的回归方程为
y=303.5x2-1 180x+2 664 (R2=0.994)
(7)
当前进速度变化时,镇压筑埂装置羽片受土壤作用力随前进速度增加而增大,田埂坚实度随前进速度增加而减小。
4.2 转速对羽片受土壤作用力和田埂坚实度的影响
当镇压筑埂装置前进速度为0.8 km/h,转速为280、300、320、340、360 r/min时,土壤对羽片作用力平均值和田埂坚实度,如表3所示。

表3 不同转速下羽片受土壤作用力平均值与田埂坚实度Tab.3 Average values of force of soil on pinna and ridge solidity at different rotation speeds
试验结果表明,镇压筑埂装置羽片受土壤作用力和田埂坚实度均随转速的增加而增大。
羽片受土壤作用力随转速变化的回归方程为
y=-0.153x2+131.0x-21 377 (R2=0.983)
(8)
田埂坚实度随转速变化的回归方程为
y=-0.010x2+16.25x-2 266 (R2=0.992)
(9)
当镇压筑埂装置转速变化时,羽片受土壤作用力和田埂坚实度均随着转速的增加而增大。
综上所述,通过动力学参数测试系统对镇压筑埂装置进行动力学参数测定和分析,获得了羽片受土壤作用力的变化规律。土壤对羽片的作用力反映在田埂坚实度上,当镇压筑埂装置转速一定时,随着前进速度的增加,羽片在单位距离上对田埂振动拍打次数减少使得坚实度较小,但受到土壤的作用力因收集土量的增加而增大;当镇压筑埂装置前进速度一定时,随着转速的增加,羽片在单位距离上对田埂振动拍打次数增多使得田埂的坚实度增大,受土壤作用力也相应增大。
5 结论
(1)设计了镇压筑埂装置工作参数动力学测试系统,以单侧镇压筑埂装置为研究对象,验证了系统的适用性和可靠性,为镇压筑埂装置动力学参数的获取与材料的选择提供了可行的方法和依据。
(2)利用设计的镇压筑埂装置工作参数动力学测试系统对镇压筑埂装置进行动力学参数测试,以镇压筑埂装置前进速度和转速为试验影响因素,获得了土壤对羽片的作用力、田埂坚实度与因素之间的变化规律。试验结果表明:随着前进速度的增加,土壤对羽片作用力平均值增大,田埂的坚实度减小,变化范围分别为2 838.1~5 695.2 N和2 250~1 680 kPa;随着转速的增加,土壤对羽片作用力平均值与所筑田埂坚实度均增大,变化范围分别为3 203.8~5 990.3 N和1 460~2 180 kPa。在满足田埂坚实度的条件下,转速对羽片受土壤作用力的影响较显著。
1 左兴健,武广伟,付卫强,等. 风送式水稻侧深精准施肥装置的设计与试验[J]. 农业工程学报,2016,32(3):14-21. ZUO Xingjian,WU Guangwei,FU Weiqiang,et al. Design and experiment on air-blast rice side deep precision fertilization device [J]. Transactions of the CSAE,2016,32(3):14-21.(in Chinese)
2 李海龙,刘刚,陈孟超,等.我国水稻生产机械化技术探析[J].农业科技与装备,2014,12(12):38-39. LI Hailong,LIU Gang,CHEN Mengchao,et al. Discussion on the technique of rice production mechanization in China [J]. Agricultural Science Technology and Equipment,2014,12(12):38-39.(in Chinese)
3 张道林,刁培松,张为春. 1ZX-1型筑埂机的设计[J]. 农机与食品机械,1998(3):25-27.
4 田丽梅,任露泉,韩志武,等. 仿生非光滑表而脱附与减阻技术在工程上的应用[J].农业机械学报,2005,36(3):138-142. TIAN Limei,REN Luquan,HAN Zhiwu,et al. Optimising oscillation frequency in oscillatory tillage [J]. Transactions of the Chinese Society for Agricultural Machinery,2005,36(3):138-142.(in Chinese)
5 郭志军,周德义,周志立.几种不同触土曲面耕作部件的力学性能仿真研究[J].机械工程学报,2010,46(15):71-75. GUO Zhijun,ZHOU Deyi,ZHOU Zhili. Simulation research on mechanical performances of several kinds of cultivating components with different soil-engaging surfaces[J]. Journal of Mechanical Engineering,2010,46(15):71-75.(in Chinese)
6 李宁,张佰阳,苗力,等,1ZG-320型水田筑埂机的设计与研究[J]. 农机使用与维修,2015(5):25-26.
7 张智泓,佟金,陈东辉,等.不同材质仿生凸齿镇压器滚动件的模态分析[J]. 农业工程学报,2012,28(13):8-15. ZHANG Zhihong,TONG Jin,CHEN Donghui,et al. Modal analysis of bionic convex teeth rolling component composed of different materials[J]. Transactions of the CSAE,2012,28(13):8-15.(in Chinese)8 MORRISON J E. Compatibility among three tillage systems and types of plant press wheels and furrow openers for verti-sol clay soils [J]. Applied Engineering in Agriculture,2002,18(3):293-295.
9 王金峰,王金武,孔彦军,等.悬挂式水田筑埂机及其关键部件研制与试验[J].农业工程学报,2013,29(6):28-34. WANG Jinfeng,WANG Jinwu,KONG Yanjun,et al. Development and experiment of suspension ridger and its key components for paddy field [J]. Transactions of the CSAE,2013,29(6):28-34. (in Chinese)
10 王金武,唐汉,王金峰,等. 1DSZ-350型悬挂式水田单侧旋耕镇压修筑埂机的设计与试验[J]. 农业工程学报,2017,33(1):25-37. WANG Jinwu,TANG Han,WAGN Jinfeng,et al. Design and experiment on 1DSZ-350 type hanging unilateral rotary tillage compacting ridger for paddy field[J]. Transactions of the CSAE,2017,33(1):25-37.(in Chinese)
11 丁启朔,葛双洋,任骏,等.水稻土深松阻力与土壤扰动效果研究[J/OL].农业机械学报,2017,48(1):47-56,63.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170107&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.01.007. DING Qishuo,GE Shuangyang,REN Jun,et al.Characteristics of subsoiler traction and soil disturbance in paddy soil[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(1):47-56,63.(in Chinese)
Design and Experiment on Working Dynamics Parameters of Single-side Ridger
WANG Jinfeng LIN Nannan WANG Jinwu HUANG Huinan SHEN Hongguang YANG Wenpan
(CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China)
The object was to obtain the forces of soil on compacting ridge device of ridger when operating. Taking 1DSZ-350 type hanging unilateral rotary tillage compacting ridger for paddy field as research carrier, a kinetic parameters measurement system was designed for compacting ridge device using strain sensor, and a kinetic test bench was set up. The operation parameters of compacting ridge device were measured, and the variation rules of the force of soil on pinnae, and the relationships between ridge compaction and forward speed and rotation speed of compacting ridge device were obtained, which was carried out through single factor experiment with the forward speed and rotation speed of compacting ridge device as experiment factors, the force of soil on pinnae and the compaction of ridge in the process of building ridge as experiment indicators. The results showed that when the rotation speed of compacting ridge device was fixed , with the increase of forward speed of machinery, the average value of force of soil on pinnae was increased, and the compaction of ridge was decreased, which was in the range of 2 838.1~5 695.2 N and 2 250~1 680 kPa, respectively. When the forward speed of machinery was fixed, the average value of force of soil on pinnae and the compaction of ridge were increased with the increase of rotation speed of compacting ridge device, which was in the range of 3 203.8~5 990.3 N and 1 460~2 180 kPa, respectively. According to the test results, the test system for operation parameters of compacting ridge device can meet the requirements, which can provide important reference for the relevant parameters test of similar device.
ridger; compaction ridge device; kinetic test; experiment
10.6041/j.issn.1000-1298.2017.08.008
2017-01-20
2017-02-06
国家重点研发计划项目(2017YFD0701105、2016YFD0300909-04)和东北农业大学“学术骨干”项目(16XG09)
王金峰(1981—),男,副教授,博士,主要从事田间作业机械研究,E-mail: jinfeng_w@126.com
王金武(1968—),男,教授,博士生导师,主要从事田间作业机械和可靠性研究,E-mail: jinwuw@163.com
S222.5+3
A
1000-1298(2017)08-0081-06