悬挂式水田单侧修筑埂机数值模拟分析与性能优化
2017-08-31王金武王金峰黄会男林南南
王金武 唐 汉 王金峰 黄会男 林南南 赵 艺,2
(1.东北农业大学工程学院, 哈尔滨 150030; 2.哈尔滨动力科技贸易股份有限公司, 哈尔滨 150030)
悬挂式水田单侧修筑埂机数值模拟分析与性能优化
王金武1唐 汉1王金峰1黄会男1林南南1赵 艺1,2
(1.东北农业大学工程学院, 哈尔滨 150030; 2.哈尔滨动力科技贸易股份有限公司, 哈尔滨 150030)
为提高水田机械田埂修筑质量,探索各工作参数对悬挂式水田单侧修筑埂机作业性能的影响,依据离散元法建立机械部件-土壤间作用模型,运用EDEM软件对机具旋耕切削集土和镇压筑埂成型阶段进行仿真分析,研究机具作业质量和功耗的动态变化规律,分析影响筑埂性能的主要因素。结合正交试验设计和数值模拟技术,以机具前进速度、旋耕工作转速和旋耕入土深度为试验因素,田埂坚实度和作业功耗为试验指标,采用多目标变量优化方法建立因素与指标间数学模型,运用Design-Expert 6.0.10软件进行数据处理优化。结果表明,影响机具综合作业性能的主次因素为机具前进速度、旋耕入土深度、旋耕工作转速;当机具前进速度、旋耕工作转速和旋耕入土深度分别为0.3 m/s、470 r/min和200 mm时,机具作业性能较理想,田埂坚实度和作业功耗分别为1 890.0 kPa和30.07 kW,其功耗较优化前降低9.93 kW。经土槽台架试验验证,台架试验结果与仿真优化结果基本一致,田埂坚实度和作业功耗相对误差分别为4.26%和5.11%,满足水田修筑埂农艺要求。
水田; 修筑埂机; 旋耕镇压; 数值分析; 性能优化
引言
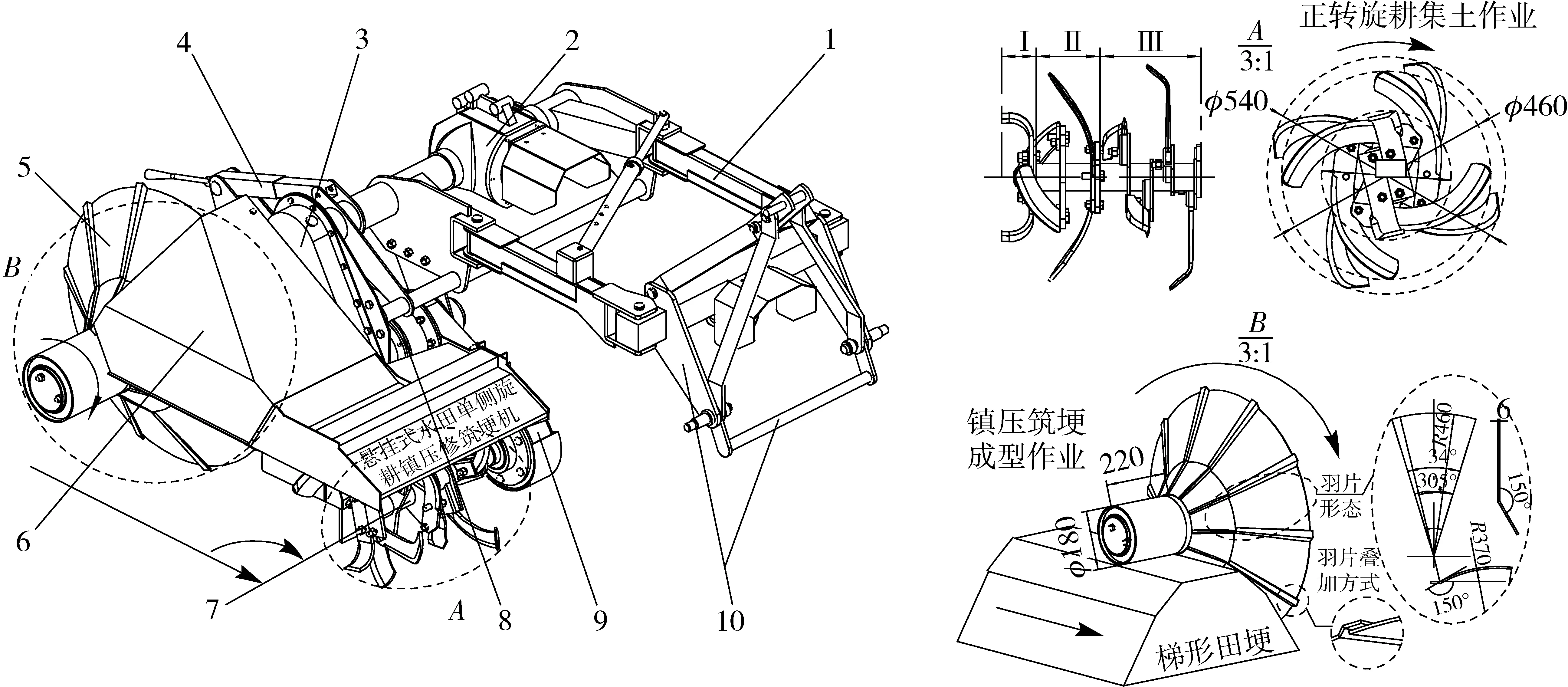
图1 悬挂式水田单侧修筑埂机结构图Fig.1 Structure diagram of hanging unilateral ridger for paddy field1.平行四臂仿形总成 2.主变速箱 3.副变速箱 4.旋耕筑埂深度调节装置 5.镇压筑埂圆盘总成6.挡土罩壳 7.旋耕集土刀辊总成 8.筑埂变速箱 9.旋耕变速箱 10.偏牵引悬挂机架 I、II、III.切型弯刀、抛土弯刀和取土弯刀3种刀具排列位置
水田机械筑埂是通过农业机具构筑出满足农艺生产要求标准田埂的技术[1-2],是实现水田蓄水淹灌和水稻种植生产的重要保证,可有效提高粮食作物产量,达到保护环境和节本增效的目的,对实现水稻全程机械化生产具有重要意义。从20世纪60年代,国内外学者开始对机械筑埂技术进行研究[3-5],其中日本对此项技术的研究较成熟,将多种技术相结合,研制出适于不同地域环境的田埂修筑机具,但价格昂贵,维修不便,且日本与中国水田土质差异性较大,并不适合于在中国各地区大面积推广使用。王金武等[6]研制的1DSZ-350型悬挂式水田单侧修筑埂机是一种通过位置仿形调节、深度相对控制、单侧旋耕集土及镇压筑埂成型等多环节共同作用进行田埂修筑的新型机具,可一次性完成集土、镇压和成型等多项作业,适用于旧埂修补及原地筑埂。但作业过程仍存在性能不稳定、功率消耗大等问题,影响机具使用的可靠性和经济性。
土壤作为农业机具的主要作用对象,是一种典型的离散物质,其内部特殊黏结、内聚、摩擦及破碎特性十分复杂,无法完全通过理论研究分析各因素间作用关系[7]。近些年随着计算机技术的发展,离散元法(Discrete element method,DEM)及其仿真软件EDEM在农业工程领域得到了广泛应用研究[8-12],也为分析机具与土壤相互作用的微观及宏观变化规律,优化相关部件作业性能提供了良好平台与手段。将试验设计方法与离散元数值模拟技术相结合,对修筑埂机性能参数进行优化,实现提高作业质量和降低功耗的目的,对机具性能改进与生产推广具有重要意义。
本文以课题组所设计的悬挂式水田单侧修筑埂机为研究对象,根据东北地区水田土壤耕作状态,依据离散元法建立机械部件-土壤间作用模型,运用EDEM软件对旋耕切削集土和镇压筑埂成型阶段进行数值模拟仿真分析,研究工况下机具作业性能和功耗的动态变化规律,分析各工作参数对筑埂作业性能影响,得到机具理想参数组合,通过台架试验验证仿真结果的准确性,以期为农机触土部件与土壤相互作用机理、机具性能优化提供一种切实可行的研究方法,同时对修筑埂机选择节省功耗的工作参数组合具有实际指导意义。
1 修筑埂机结构与工作原理
悬挂式水田单侧修筑埂机结构如图1所示,主要由偏牵引悬挂机架、平行四臂仿形总成、旋耕集土刀辊总成、镇压筑埂圆盘总成、挡土罩壳、旋耕筑埂深度调节装置和多级传动系统等部件组成。机具采用轻量化结构设计,各部件以组装形式连接,可通过仿形总成和深度调节装置控制部件作业位置,适应不同环境田埂修筑作业。其中旋耕切削集土和镇压筑埂成型是2个最重要的作业环节,直接影响机具作业质量与动力消耗。旋耕集土刀辊总成主要通过3种类型刀具(取土弯刀、抛土弯刀和切型弯刀)综合设计与排列,实现远处取土抛土、近处推土切型的集土功用。镇压筑埂圆盘总成是由10片独立弹性羽片(有效半径为360 mm,折弯角度为150,最大回转直径为800 mm)在圆周上以阶梯形式均匀叠加组合焊接而成,通过自身前进旋转,以静力压实和振动压实相结合的方式将田埂镇压成型,满足水田田埂形态及坚实度要求,其具体工作原理见文献[6]。
2 离散元模型建立与仿真过程分析
运用离散元仿真软件EDEM建立机械部件-土壤间作用模型,以田埂坚实度和旋耕镇压总功耗为主要评价指标,在常规工况下对修筑埂机田间作业状态进行模拟,分析影响机具作业性能的主要因素,为后续仿真优化及台架验证试验奠定基础。
2.1 离散元模型建立
2.1.1 修筑埂机模型建立
为合理有效地进行仿真模拟与计算,对整机模型做简化处理,隐藏去除其牵引机架及各级传动箱体等部件。应用三维制图软件Pro/E对机具进行实体建模(比例1∶1),以.igs文件格式导入EDEM软件中,如图2所示。根据物理样机试制特点,设置镇压筑埂圆盘总成、挡土罩壳及旋耕刀辊轴材料属性为45号钢,泊松比为0.31,剪切模量为7.0×1010Pa,密度为7 800 kg/m3;各类型刀具材料属性为65Mn钢,泊松比为0.35,剪切模量为7.8×1010Pa,密度为7 850 kg/m3。
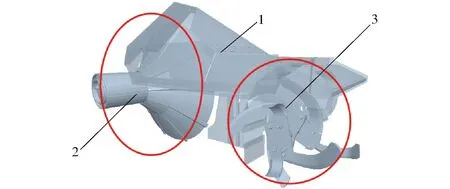
图2 修筑埂机几何模型Fig.2 Geometric model of ridger for paddy field1.挡土罩壳 2.镇压筑埂圆盘总成 3.旋耕集土刀辊总成
2.1.2 土壤颗粒模型建立
土壤物理性质与机械筑埂作业质量有密切关系,其内部颗粒间特殊黏结、破碎属性及力学关系十分复杂。为真实还原水田黏性土壤状态,保证模拟仿真可靠性,以东北地区耕作黑壤土(含水率为25%~30%)为研究对象,对其物理参数进行测定。由于机具主要对耕作层土壤进行旋耕镇压作业,因此忽略犁底层及心土层土壤物理状态的差异。通过筛分法试验,测得85%土壤颗粒尺寸介于0.5~5.0 mm,其余15%小于0.25 mm,因此设置虚拟颗粒模型粒径尺寸在0.5~5.0 mm间,且其尺寸大小呈正态分布。根据文献[13]将土壤颗粒简化为球状、杆状、鳞片状、圆盘状、团粒状、板片状、棱块状、棱锥状和棱柱状9种形状,并运用EDEM软件多球面组合方式进行填充,其基本形态如图3所示。
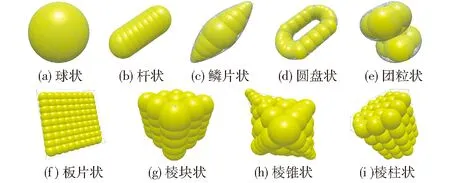
图3 土壤颗粒离散元模型Fig.3 Discrete element simulation models of soil particles
通过环刀法试验,测得土壤颗粒密度为2 400~2 800 kg/m3,平均容重为2 100~2 500 kg/m3。通过直接剪切试验及虚拟堆积仿真标定方法,测得土壤颗粒内摩擦因数为0.311~0.562,剪切模量为2.1×107~2.7×107Pa。根据文献[14]设置土壤颗粒间内聚力为1.25×105~1.85×105Pa,泊松比为0.23~0.44。
2.1.3 其他仿真参数设定

(1)
其中
Fcoh,ij=kcoh,ijAcoh,ij
式中Ii——土壤颗粒i转动惯量,kg·m2ni——土壤颗粒i接触的颗粒总数,个vi——土壤颗粒i移动速度,m/sωi——土壤颗粒i转动角速度,rad/sTτ,ij——土壤颗粒i所受切向力矩,N·mTr,ij——土壤颗粒i所受滚动力矩,N·mkcoh,ij——土壤颗粒黏附能量密度,N/m2Acoh,ij——土壤颗粒接触面积,m2
土壤颗粒黏结力Fcoh,ij主要根据其内部黏聚特性进行设定,将其内部黏结、内聚、摩擦及破碎等关系简化为Hertz-Mindlin with bonding接触模型和JKR接触模型,以模拟土壤颗粒间、颗粒与边界间相互作用。通过倾斜板试验、休止角试验及虚拟仿真标定等方法分别对45号钢-土壤颗粒、65Mn钢-土壤颗粒和土壤颗粒间的动摩擦因数进行测定,并根据文献[15]得到45号钢-土壤颗粒、65Mn钢-土壤颗粒和土壤颗粒间的静摩擦因数及恢复因数,相关参数如表1所示。
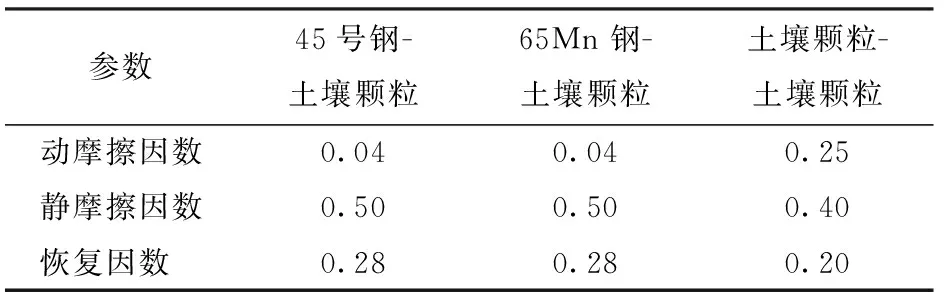
表1 仿真材料接触参数Tab.1 Material contact parameters of simulation
为模拟实际田间筑埂作业状态,运用EDEM软件建立虚拟土槽,设置土槽基本尺寸(长×宽×高)为8 000 mm×2 000 mm×800 mm,将其设定为虚拟颗粒工厂,以10 000个/s的速率生成初速度为0 m/s的土壤颗粒模型,总量为100 000个,生成颗粒总时间为10 s,保证土槽内存有充足颗粒进行仿真。在生成颗粒过程中,使其仅在重力作用下自由沉降,且整体生成后在颗粒群上方加载校准土壤密度所需的垂直载荷,进行土壤模型压实,使仿真与实际土壤保持一致。
2.2 虚拟仿真过程与分析
2.2.1 虚拟筑埂仿真过程
在虚拟筑埂仿真过程中,设置修筑埂机位于土槽一侧进行初始作业。根据机具实际作业状态及水田修筑埂农艺要求,以某一常规工况为例进行仿真,分析其筑埂质量与功率消耗情况。设置机具前进速度为0.3 m/s,旋耕集土刀辊总成采用正转形式进行切削土壤,其旋耕工作转速为500 r/min(旋耕转速与镇压转速之比为3∶2),旋耕入土深度为200 mm。
为保证仿真的连续性,设置其固定时间步长为5.76×10-5s(即Rayleigh时间步长的10%),总时间为25 s,有效作业时间为13 s(0~10 s土壤颗粒生成,24~25 s机具运动至土槽终点),网格单元尺寸为5 mm,为颗粒平均半径的2倍,以便对后续数据精准处理。
图4a所示为三维空间XYZ内修筑埂机虚拟仿真作业状态,对挡土罩壳进行虚隐化处理,以便观察分析土壤被切削、抛掷及镇压过程状态变化。图4b为XOZ平面内旋耕切削集土作业状态,当机具沿X轴正方向前进运动时,旋耕刀辊集土总成顺时针正转切削土壤,取土弯刀先与土壤颗粒发生接触,以距刀轴中心先近后远的顺序依次入土完成取土作业。抛土弯刀对土垡进行二次旋切粉碎,同时切型弯刀将土壤颗粒旋切为阶梯土层,土壤颗粒在两种刀具的共同作用下被定向抛掷堆聚于后方及侧后方,通过挡土罩壳撞击及导向作用,将土壤颗粒聚拢至镇压区域,以便后续对田埂镇压修筑。图4c为YOZ平面内镇压筑埂成型作业状态,镇压筑埂圆盘总成以较慢转速进行旋转前进运动,通过镇压圆盘自身重力及旋转动力反复碾压,对所聚拢土壤颗粒压实成型,完成田埂修筑作业。上述两阶段虚拟仿真作业与实际机具工作状态基本一致。
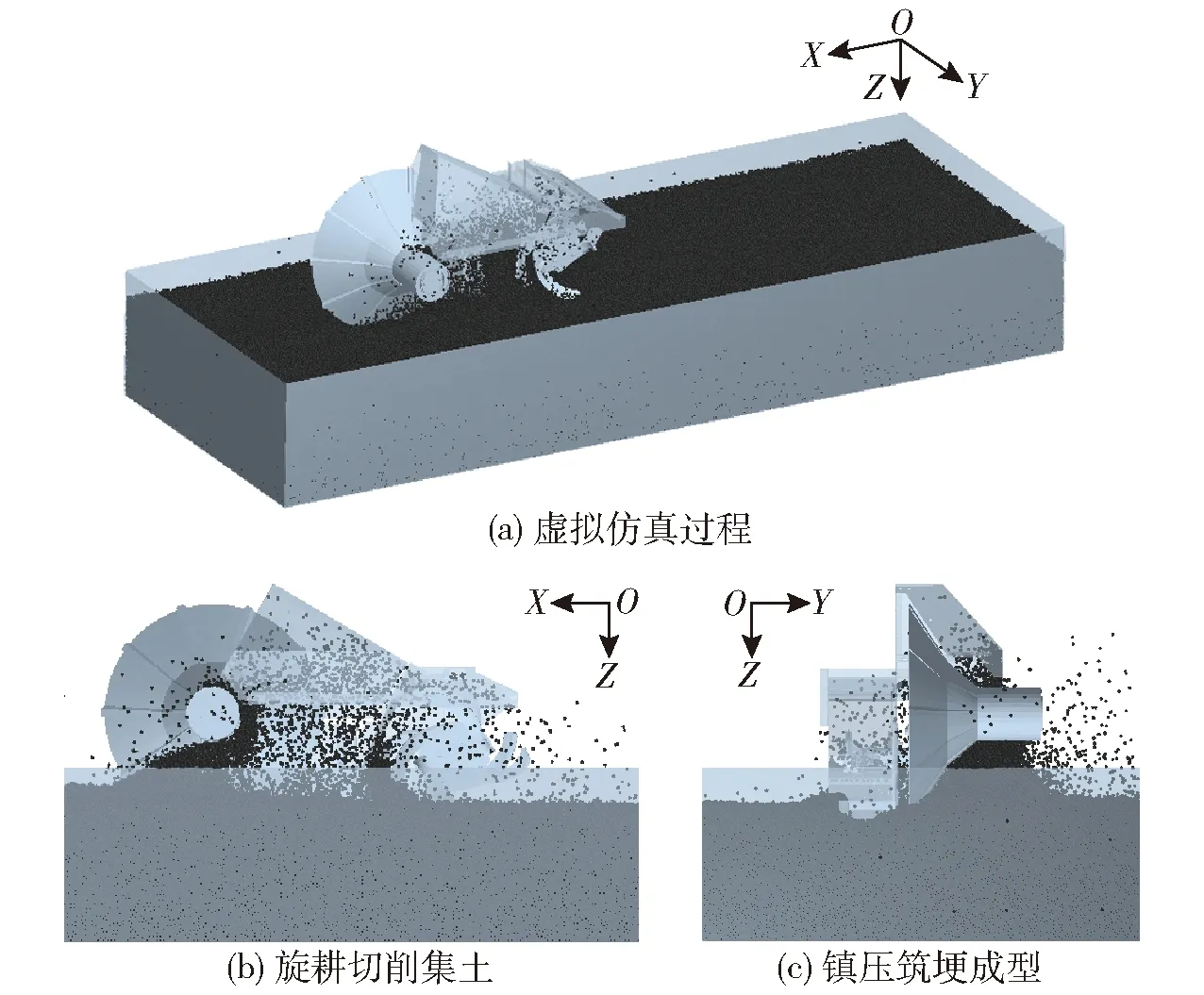
图4 EDEM旋耕镇压仿真作业Fig.4 EDEM simulation processes of rotary tillage and compacting
2.2.2 虚拟仿真结果与分析
由于目前国内外尚无评价机械田埂修筑作业质量的统一标准,根据EDEM软件模拟机具与土壤颗粒间作用特点,同时检测机具作业功耗情况,查阅相关资料并结合实际水田修筑埂农艺要求,选取田埂坚实度及旋耕镇压总功耗为虚拟仿真分析的评价指标。
2.2.2.1 田埂坚实度
田埂坚实度是评价田埂修筑作业质量的重要指标,可直接反映出机具旋耕切削土壤并克服土壤颗粒内部黏结与内聚进行压实的作业状态。本研究主要运用EDEM软件数据处理模块(Analyst),对虚拟作业所筑的土壤田埂进行力学分析,处理计算颗粒间接触黏结等综合作用。
由于EDEM软件仅可对田埂整体镇压力(即颗粒内部微观接触、黏结、内聚及摩擦等作用沿田埂顶面法线方向的合力)进行测定研究,为直观评价机具修筑田埂质量,需将其转化为土壤坚实度指标,因此本研究在仿真试验前进行台架标定试验,建立人工测量坚实度与镇压力间模型[16]。以东北地区耕作黑壤土为标定供试土壤(含水率为(27.1±0.5)%,密度为2 530 kg/m3),保证其与所建土壤颗粒模型物理性质基本一致。如图5a所示,采用WDW-5型微机电子式万能试验机(济南试金集团)进行测试,其顶端配置拉压传感器(量程为0~200 N、测量精度为0.02 N),以0.3 m/s速度均匀缓慢压实土壤,分别控制其下降压缩土壤位移为100、160、220、280、340 mm。利用配套计算机实时采集存储所对应的镇压力数值,通过SL-TYA型土壤坚实度测试仪(杭州汇尔仪器设备有限公司)测定各状态下的土壤坚实度。所得人工测量土壤坚实度S与均匀镇压力a间的数据拟合曲线如图5b所示,具体标定关系为
S=1.197 3a-37.678
(2)
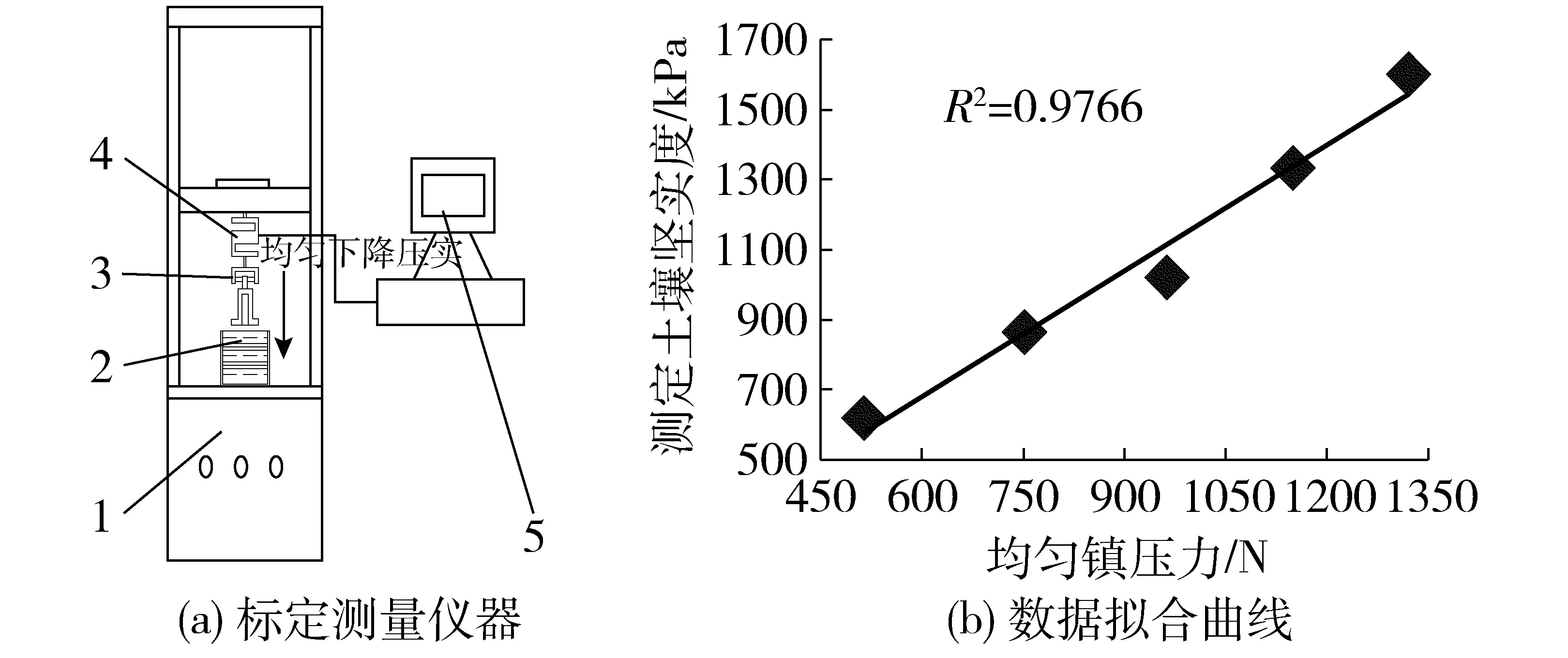
图5 土壤坚实度标定试验与拟合关系曲线Fig.5 Calibration experiment and fitting curve of soil firmness1.万能试验机 2.微型土槽 3.镇压装置 4.拉压传感器 5.计算机
在此基础上,运用C语言对力学函数进行编辑[17],通过EDEM软件后处理的应用编程接口(Application programming interface,API)完成虚拟田埂整体镇压力的测量。如图6所示,测定田埂镇压合力为1 237.3 N,代入标定模型关系式(2)中可得,此工况下所筑虚拟田埂坚实度为1 443.7 kPa,可满足田埂修筑农艺要求。
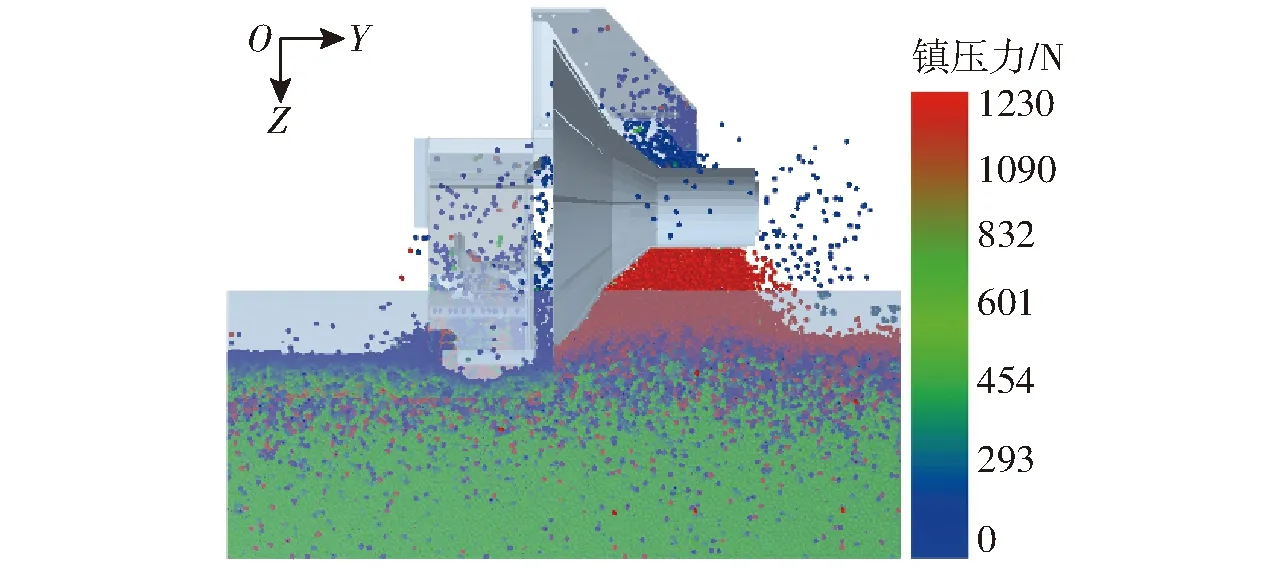
图6 虚拟田埂镇压力测定Fig.6 Pressure measurement of virtual ridge
2.2.2.2 功率消耗
功率消耗(简称功耗)是衡量机具综合性能的主要技术参数,直接体现整机作业性能。修筑埂机作业功耗主要来源于旋耕切削集土、镇压筑埂成型和中间各级传动3个过程,本研究主要对虚拟仿真状态下旋耕集土刀辊及镇压筑埂圆盘2个关键部件的作业功耗进行测定分析,将机具总功耗简化为
∑P=Px+Pz+Pt
(3)
式中 Px——旋耕集土阶段功耗,kWPz——镇压筑埂阶段功耗,kWPt——各级传动功耗,kW
在仿真过程中,Pt值较小可忽略不计。作业时旋耕集土刀辊及镇压筑埂圆盘皆随机具前进运动,同时进行自身旋转切削及镇压作业,其自身扭矩的变化可反映作业功耗的差异,因此将其转化为对关键部件扭矩的测定,即
(4)
其中
n1∶n2=3∶2
将式(4)代入式(3)中,简化整理可得
(5)
式中Tx——旋耕集土刀辊扭矩,N·mTz——镇压筑埂圆盘扭矩,N·mn1——旋耕集土刀辊工作转速,设为500 r/min
n2——镇压筑埂圆盘工作转速,r/min
通过EDEM软件对2个关键部件作业扭矩进行测定,并将数据导入Excel软件中进行整理,计算各时刻机具各阶段功耗变化趋势,如图7所示。
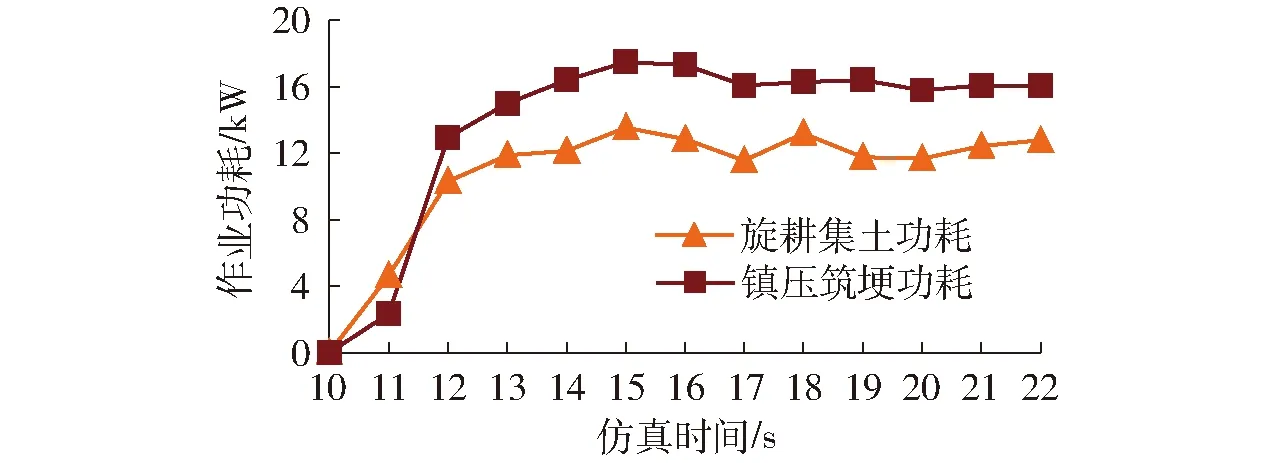
图7 各阶段虚拟作业功耗变化曲线Fig.7 Variation curves of power consumption in simulation processes
由图7可知,旋耕集土刀辊与土壤颗粒相互作用初期,其作业功耗随时间增加而迅速增大。仿真作业10.0~13.2 s时,刀辊旋耕作业功耗迅速上升至12.15 kW,主要由于土壤整体受到挤压变形至破碎需要消耗较大能量,刀具进行切削集土作业使土壤变形,因克服内部黏结与内聚作用,其变化速率较快。随刀辊后续切削集土,其作业功耗变化趋于稳定,当仿真运行至15.1 s时,作业功耗达到最大值13.21 kW,主要由于土壤颗粒在被破坏后相互间黏结作用减小,刀具切削力保持稳定状态,其作业功耗保持在12.64 kW左右。镇压筑埂圆盘作业功耗与刀辊作业功耗变化趋势基本相同,但整体功耗略高于旋耕切削集土作业。仿真作业10.0~13.2 s时,其作业功耗随时间增加而迅速增大至15.11 kW,随圆盘后续压实作业,其作业功耗变化也趋于稳定,保持在16.29 kW左右,主要由于前期旋耕集土量不断增加,依靠其自身旋转碾压作用克服土壤颗粒间内聚力及摩擦力,使土壤颗粒重新紧密排列。当机具平稳作业时,两阶段功耗之和稳定在28.93 kW左右。
为检验采用离散元数值仿真进行机具功耗性能测定方法的准确性,参考农业机械设计手册[18]经验公式对旋耕切削集土过程进行分析,即
Px=1×10-5KλhvB
(6)
其中
Kλ=KgKsKhKcKf
式中h——旋耕入土深度,mmv——机具前进速度,m/sB——旋耕作业幅宽,mmKλ——旋耕比阻,N/cm2Kg——土壤坚实度系数Ks——耕深修正系数Kh——土壤含水率系数Kc——残茬植被修正系数Kf——作业方式修正系数
将仿真边界条件及相关修正系数代入式(6)中,可得旋耕切削集土作业功耗Px=13.80 kW,与仿真结果基本一致,证明运用数值模拟测定机具作业功耗的合理性与可行性。
3 EDEM虚拟仿真试验与分析
3.1 虚拟仿真试验设计
为研究各工况下修筑埂机作业质量与功耗变化规律,分析影响筑埂作业性能的主要因素,得到理想作业参数组合,在前期虚拟模型建立及数值模拟分析基础上,进行EDEM虚拟仿真正交试验研究。
由实际机具筑埂作业状态可知,田埂修筑作业质量与机具前进速度、旋耕工作转速、旋耕入土深度及外界土壤状态等因素有关。为提高虚拟试验可控性及准确性,选取机具前进速度、旋耕工作转速及旋耕入土深度为试验因素,以作业后所筑田埂坚实度和旋耕镇压总功耗为试验指标。根据前期模拟分析、单因素预试验及田间筑埂作业要求,配合各因素可控工况范围,设定试验因素水平如表2所示。

表2 试验因素水平Tab.2 Levels of experimental factors
3.2 试验结果分析与优化
在此基础上,采用三因素四水平正交试验设计虚拟试验方案,选取L16(45)正交表安排试验[19-20]。虚拟试验操作值与参数设计值无误差,可根据数据进行结果分析,并对影响试验指标的主要因素进行显著性分析,寻求机具理想工作参数组合,具体试验方案与结果如表3所示。A、B、C为因素水平值。
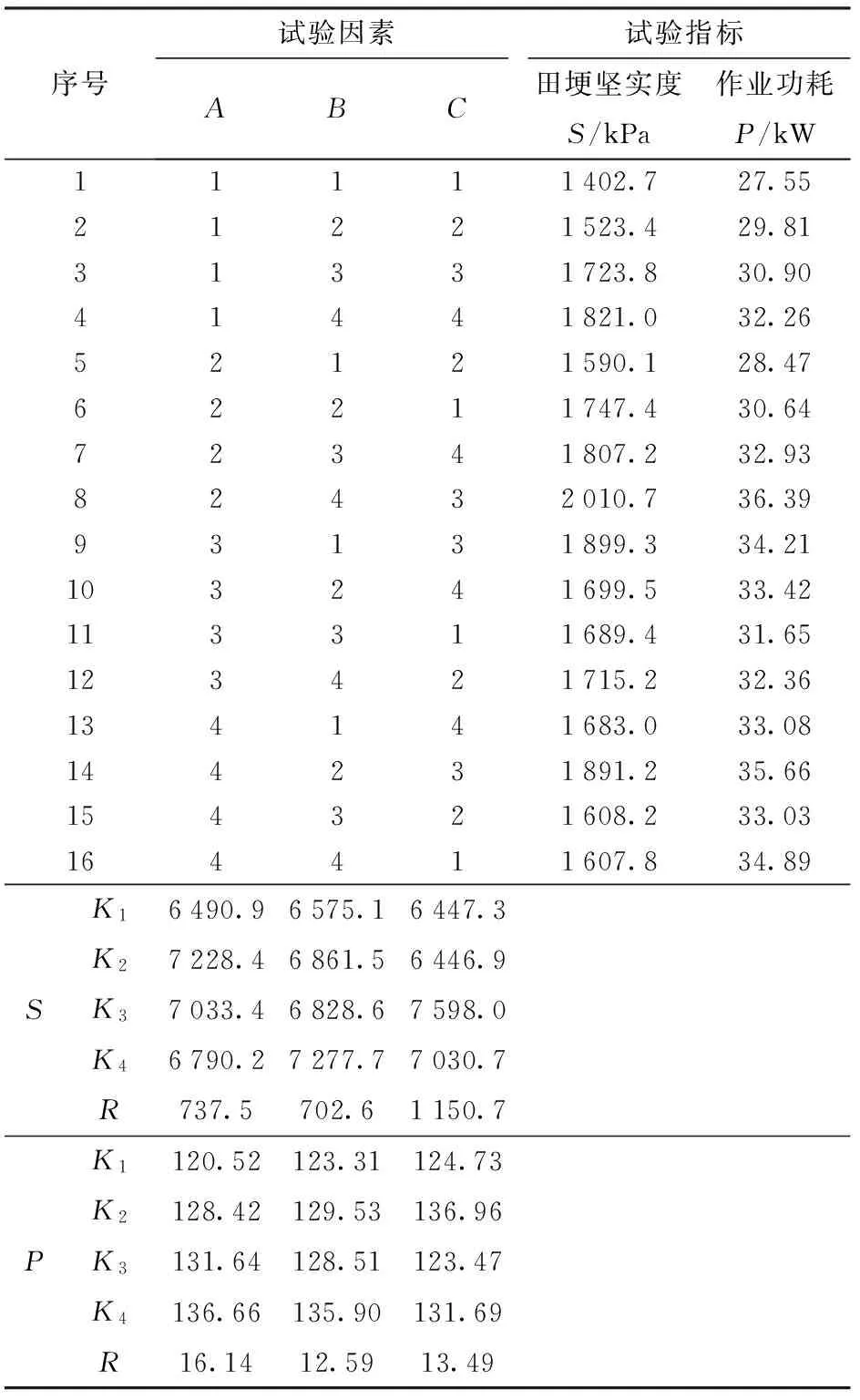
表3 试验方案与结果Tab.3 Schemes and results of tests
在满足实际田埂农艺要求范围内,其修筑田埂坚实度越高,作业功耗越小,表明机具综合作业性能越好。由表3极差分析可知,影响田埂坚实度指标的3个主次因素顺序为:旋耕入土深度C、机具前进速度A、旋耕工作转速B,其较优参数水平组合为A2B4C3;影响机具作业功耗的3个主次因素顺序为:机具前进速度A、旋耕入土深度C、旋耕工作转速B,其较优参数水平组合为A1B1C3。根据实际田间生产作业要求及机具自身特点,确定影响机具综合作业性能的主次顺序因素为:机具前进速度、旋耕入土深度、旋耕工作转速。
为准确判断各因素水平对作业质量及功耗影响的显著性,运用Design-Expert 6.0.10软件对正交试验数据进行方差分析和P检验显著性判断,其显著水平设定为0.01,方差分析计算结果如表4所示。由表4可知,方差分析结果与上述极差分析相符合,即旋耕入土深度对田埂坚实度影响极显著(P<0.01),机具前进速度和旋耕工作转速对田埂坚实度影响较显著(P<0.10);机具前进速度和旋耕入土深度对作业功耗影响极显著(P<0.01),旋耕工作转速对作业功耗影响显著(P<0.05)。
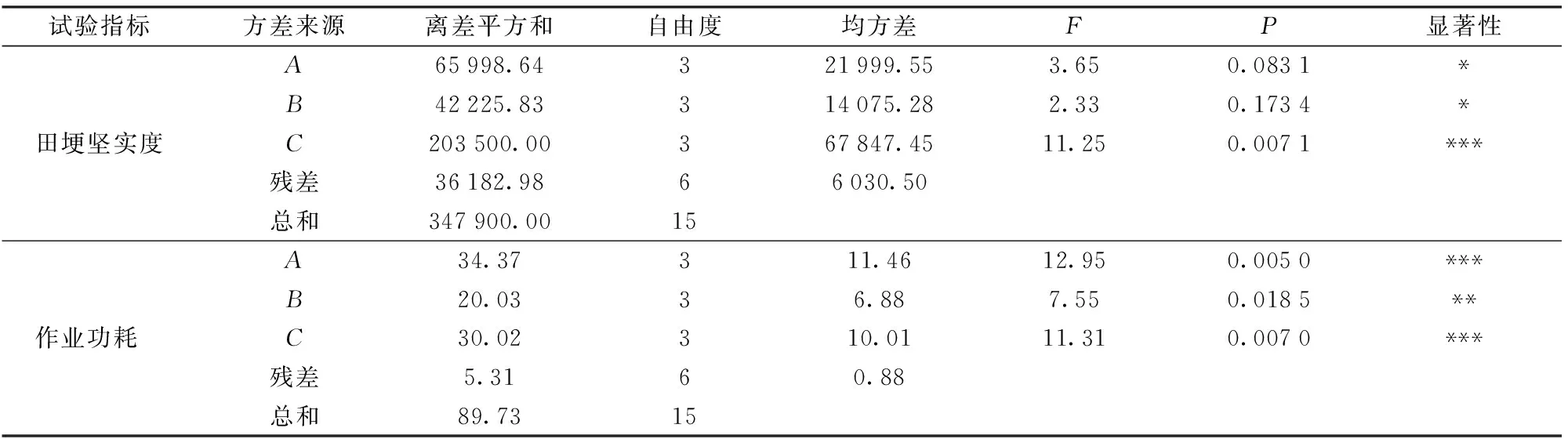
表4 试验方差分析Tab.4 Variance analysis of test results
注:*表示较显著(P<0.10);** 表示显著(P<0.05);*** 表示极显著(P<0.01)。
为得到机具理想工作参数组合,对试验因素进行优化设计,遵循提高田埂坚实度、降低作业功耗的原则,采用多目标变量优化方法[21],结合试验因素边界条件,建立非线性规划参数模型为
(7)
基于Design-Expert 6.0.10软件中的多目标参数优化(Optimization)模块对数学模型进行分析求解,可得多组优化参数组合。根据修筑埂机实际作业状态可知,其机具前进速度直接影响筑埂作业效率,旋耕工作转速影响切削碎土效果,旋耕入土深度影响筑埂集土量,多个因素共同影响机具整体作业质量及稳定性。综合分析从优化结果中选取一组合理参数组合A2B1C3,即当机具前进速度为0.3 m/s,旋耕工作转速为470 r/min,旋耕入土深度为200 mm时,机具综合作业性能较理想,其田埂坚实度为1 908.6 kPa,作业功耗为31.93 kW。根据所优化的结果进行虚拟仿真验证,其所筑田埂坚实度为1 890.0 kPa,作业功耗为30.07 kW,与优化结果基本一致,旋耕镇压环节功耗较优化前降低9.93 kW。
4 台架试验
为验证基于EDEM软件悬挂式水田单侧修筑埂机数值模拟仿真优化的准确性,在工况下进行台架验证试验。试验地点为黑龙江省农业机械工程科学研究院土槽实验室,试验设备包括悬挂式水田单侧修筑埂机、TCC-III型计算机监控辅助测试试验台车(黑龙江省农业机械工程科学研究院)、INV1861A型便携式应变调理仪(东方振动噪声研究所)、INVEST3018-24型信号采集仪及配套DASP-10信号处理软件(东方振动噪声研究所)、JN338型转矩转速测量仪及配套扭矩传感器(长沙湘仪动力测试仪器有限公司)、过孔集流环(深圳市森瑞普电子有限公司)、SL-TYA型土壤坚实度测试仪(杭州汇尔仪器设备有限公司)、数据处理计算机、铁锹和钢板尺等,如图8a所示。土槽台架内供试土壤为东北地区耕作黑壤土,对土壤进行耕整处理,检测土壤绝对含水率为(28.2±0.5)%,土壤密度为2 610 kg/m3,土壤坚实度为130~200 kPa,符合田埂修筑作业实际状态。

图8 台架试验Fig.8 Bench test for ridging performance1.控制台车面板 2.计算机监控辅助测试试验台车 3.悬挂式水田单侧修筑埂机 4.土槽台架 5.数据处理终端 6.应变调理仪 7.采集仪连接线 8.过孔集流环
通过土壤坚实度测试仪对所筑田埂坚实度进行测量,通过土槽试验台车动力输出轴轴端的传感系统对整机功耗进行测定。结合整机结构特点,分别对旋耕切削集土和镇压筑埂成型阶段功耗进行测量,采用应力检测的扭矩测量技术[22],试制旋耕刀辊弹性敏感轴和镇压圆盘弹性敏感轴,通过法兰盘将其与作业部件旋转轴连接,在轴体上搭建全桥式应变传感器(由4组BX120-0.5AA型应变片组成,电阻(120.0±0.1)Ω,灵敏系数(2.08±0.1)%),同时外接集流环与信号采集仪及应变调理仪连接,进行除噪、应变信号放大,将模拟信号转化为数字信号,经压/频转换转化为与扭矩应变成正比的频率信号,实现对扭矩数据的输出与处理,如图8b、8c所示。试验前需对静止状态下贴有应变片的刀辊及圆盘进行标定,以减小试验测定过程中的系统误差。
在台架试验过程中,将作业区域划分为启动调整区、有效试验区及停止缓冲区,测试总距离为70 m,前后启动调整区和停止区分别为5 m。在机具前进速度为0.3 m/s、旋耕工作转速为470 r/min和旋耕入土深度为200 mm工况下进行田埂修筑作业。对田埂坚实度、各作业阶段功耗及总功耗进行测量,重复5次试验取平均值,相关数据结果如表5所示。
由表5可知,在相同工况下实际田埂修筑作业质量略低于仿真试验优化结果,所筑田埂质量良好,坚实光滑,外形平整一致,其田埂坚实度相对误差为4.26%,作业功耗相对误差为5.11%。产生误差的原因可能是由于土壤外界条件状态变化造成机具非规则振动,导致切削镇压作业产生额外摩擦、碰撞及磨损功耗,影响机具作业稳定性,但误差在可接受范围内。在所优化工作参数下进行稳定作业,较优化前功耗平均降低18.36%(原常规田间作业所需配套动力45 kW),满足水田修筑埂农艺要求。
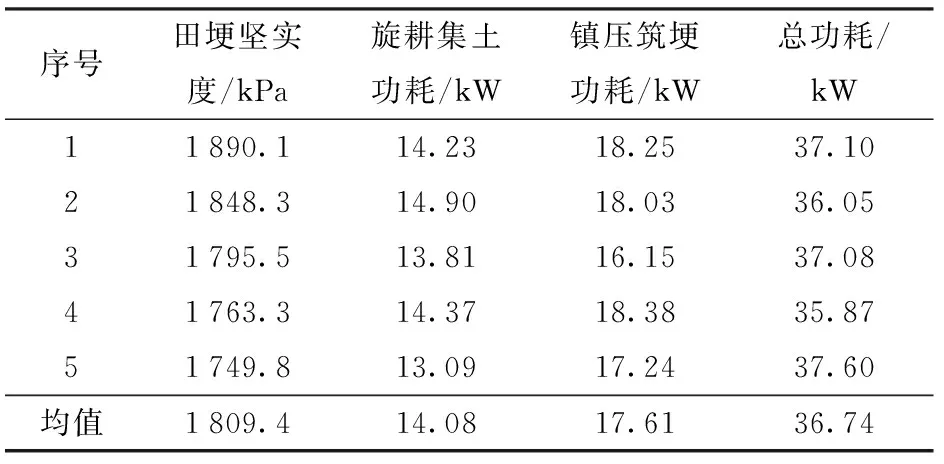
表5 台架试验结果Tab.5 Bench test results
5 结论
(1)以悬挂式水田单侧修筑埂机为研究对象,依据离散元法建立了机械部件-土壤间作用模型,运用EDEM软件对旋耕切削集土和镇压筑埂成型阶段进行了数值模拟仿真分析,研究了机具作业质量和功耗的动态变化规律。
(2)以机具前进速度、旋耕工作转速和旋耕入土深度为试验因素,田埂坚实度和作业功耗为试验指标,采用虚拟正交试验方法建立了因素与指标间数学模型,运用Design-Expert 6.0.10软件对试验结果进行处理。由极差分析和方差分析可得,影响机具综合作业性能的主次因素顺序为:机具前进速度、旋耕入土深度、旋耕工作转速。采用多目标变量优化方法建立了优化模型,结果表明,当机具前进速度、旋耕工作转速和旋耕入土深度分别为0.3 m/s、470 r/min和200 mm时,机具作业性能较理想,田埂坚实度和作业功耗分别为1 890.0 kPa和30.07 kW,其功耗较优化前降低9.93 kW。
(3)土槽台架验证试验结果表明,台架试验结果与仿真优化结果基本一致,田埂坚实度和作业功耗的相对误差分别为4.26%和5.11%,可满足水田修筑埂农艺要求。
1 李海龙,刘刚,陈孟超,等. 我国水稻生产机械化技术探析 [J]. 农业科技与装备,2014,12(12):38-39.
2 苑严伟,李树君,吴海华,等. 水稻田虚拟试验场景建模与仿真 [J/OL]. 农业机械学报,2013,44(增刊1):224-229.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s140&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.040. YUAN Yanwei, LI Shujun, WU Haihua, et al. Modeling and simulation of rice field virtual scene [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 224-229. (in Chinese)
3 赵艺. 水田筑埂机构的机理分析与设计 [D]. 哈尔滨:东北农业大学,2015.
4 王金峰,王金武,孔彦军,等. 悬挂式水田筑埂机及其关键部件研制与试验 [J]. 农业工程学报,2013,29(6):28-34. WANG Jinfeng, WANG Jinwu, KONG Yanjun, et al. Development and experiment of suspension ridger and its key components for paddy field [J]. Transactions of the CSAE, 2013, 29(6): 28-34. (in Chinese)
5 关振君. DTZG-01型稻田筑埂机的设计研究 [J]. 农业科技与装备,2011(10):20-22.
6 王金武,唐汉,王金峰,等. 1DSZ-350型悬挂式水田单侧旋耕镇压修筑埂机的设计与试验 [J]. 农业工程学报,2017,33(1):25-37. WANG Jinwu, TANG Han, WANG Jinfeng, et al. Design and experiment on 1DSZ-350 type hanging unilateral rotary tillage compacting ridger for paddy field [J]. Transactions of the CSAE, 2017, 33(1): 25-37. (in Chinese)
7 方会敏,姬长英,AHMED Ali Tagar,等. 秸秆-土壤-旋耕刀系统中秸秆位移仿真分析 [J/OL]. 农业机械学报,2016,47(1):60-67. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160109&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.01.009. FANG Huimin, JI Changying, AHMED Ali Tagar, et al. Simulation analysis of straw movement in straw-soil-rotary blade system [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 60-67. (in Chinese)
8 王金武,唐汉,王奇,等. 基于EDEM软件的指夹式精量排种器排种性能数值模拟与试验 [J]. 农业工程学报,2015,31(21):43-50. WANG Jinwu, TANG Han, WANG Qi, et al. Numerical simulation and experiment on seeding performance of pickup finger precision seed-metering device on EDEM [J]. Transactions of the CSAE, 2015, 31(21): 43-50. (in Chinese)
9 王金武,王奇,唐汉,等. 水稻秸秆深埋整秆还田装置设计与试验 [J/OL]. 农业机械学报,2015,46(9):112-117. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150916&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.09.016. WANG Jinwu, WANG Qi, TANG Han, et al. Design and experiment of rice straw deep buried and whole straw returning device [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 112-117. (in Chinese)
10 方会敏,姬长英,FARMAN Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析 [J/OL]. 农业机械学报,2016,47(3):22-28.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160304&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.03.004. FANG Huimin, JI Changying, FARMAN Ali Chandio, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 22-28. (in Chinese)
11 LIU H X, GUO L F, Fu L L, et al. Study on multi-size seed metering device for vertical plate soybean precision planter [J]. International Journal of Agricultural and Biological Engineering, 2015, 8(1): 1-8.
12 胡永光,杨叶成,肖宏儒,等. 茶园施肥机离心撒肥过程仿真与参数优化 [J/OL]. 农业机械学报,2016,47(5):77-82.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160511&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.05.011. HU Yongguang, YANG Yecheng, XIAO Hongru, et al. Simulation and parameter optimization of centrifugal fertilizer spreader for tea plants [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(5): 77-82. (in Chinese)
13 王功明,郭新宇,赵春江,等. 基于粒子系统的土壤可视化仿真研究 [J]. 农业工程学报,2008,24(2):152-158. WANG Gongming, GUO Xinyu, ZHAO Chunjiang, et al. Soil visual simulation study based on particle system [J]. Transactions of the CSAE, 2008, 24(2): 152-158. (in Chinese)
14 郑侃,何进,李洪文,等. 基于离散元深松土壤模型的折线破土刃深松铲研究 [J/OL]. 农业机械学报,2016,47(9):62-72. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160910&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.09.010. ZHENG Kan, HE Jin, LI Hongwen, et al. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 62-72. (in Chinese)
15 CHEN Y, LARS J M, TAVS N. A discrete element model for soil-sweep interaction in three different soils [J]. Soil & Tillage Research, 2013,126: 34-41.
16 贾洪雷,李杨,齐江涛,等. 基于ZigBee的播种行表层土壤坚实度采集系统 [J/OL]. 农业机械学报,2015,46(12):39-46.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151206&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.12.006. JIA Honglei, LI Yang, QI Jiangtao, et al. Design and test of soil compaction acquisition system for sowing line surface based on ZigBee [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(12): 39-46. (in Chinese)
17 UCGUL M, JOHN M F, CHRIS S. 3D DEM tillage simulation: validation of a hysteretic spring (plastic) contact model for a sweep tool operation in a cohesionless soil [J]. Soil & Tillage Research, 2014, 144: 220-227.
18 中国农业机械化科学研究院.农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007.
19 吕金庆,尚琴琴,杨颖,等. 马铃薯杀秧机设计与优化 [J/OL]. 农业机械学报,2016,47(5):106-114. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160515&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.05.015. LV Jinqing, SHANG Qinqin, YANG Ying, et al. Design Optimization and experiment on potato haulm cutter [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47 (5): 106-114. (in Chinese)
20 郭志军,杜干,李忠利,等. 触土曲面形式对推土板减阻性能影响的正交试验 [J/OL]. 农业机械学报,2015,46(7):372-378.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150753&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.053. GUO Zhijun, DU Gan, LI Zhongli, et al. Orthogonal experiment on resistance reduction by soil-engaging surfaces on bulldozer blade [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46 (7): 372-378. (in Chinese)
21 王立军,张传根,丁振军. 玉米收获机清选筛体结构优化 [J/OL]. 农业机械学报,2016,47(9):108-114. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160916&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.09.016. WANG Lijun, ZHANG Chuangen, DING Zhenjun. Structure optimization of cleaning screen for maize harvester [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9): 108-114. (in Chinese)
22 李耀明,唐忠,徐立章,等. 纵轴流脱粒分离装置功耗分析与试验[J]. 农业机械学报,2011,42(6):93-97. LI Yaoming, TANG Zhong, XU Lizhang, et al. Power analysis and experiment on longitudinal axial-threshing unit test-bed [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 93-97. (in Chinese)
Numerical Analysis and Performance Optimization Experiment on Hanging Unilateral Ridger for Paddy Field
WANG Jinwu1TANG Han1WANG Jinfeng1HUANG Huinan1LIN Nannan1ZHAO Yi1,2
(1.CollegeofEngineering,NortheastAgriculturalUniversity,Harbin150030,China2.HarbinPowerTechnologyTradeIncorporation,Harbin150030,China)
Paddy field mechanization ridging is constructed by agricultural machinery to meet the production requirements of rice irrigation and ridge technology. It can improve the yield of grain crops and reduce the waste of water resources, which is conducive to the construction of standardized farmland in China. In order to improve the quality of paddy field mechanization ridging and investigate the working parameters of performance of hanging unilateral ridger, the interaction model of machinery and soil was established by using distinct element method. The EDEM software was employed to simulate the processes of rotary tillage collecting soil and compacting ridging. And then the dynamic behaviors of performance and power consumption of ridger were researched under the working conditions. The principal factors which affected the quality of machine operation were analyzed. Orthogonal simulation experiment was carried out with forward speed, rotational speed, tillage depth as experimental factors and ridge density and power consumption as assessment consumption. Based on experimental data, a mathematical model was built by using the Design-Expert 6.0.10 software, and the experimental factors were optimized, the best combination was achieved. By using range analysis method and variance analysis method to determine the importance index, the primary and secondary indexes were as follows: forward speed, tillage depth and rotational speed. And the experiment results showed that forward speed was 0.3 m/s, rotational speed was 470 r/min, tillage depth was 200 mm, and the maximum ridge density was 1 890.0 kPa, the minimum power consumption was 30.07 kW, and the improved power consumption exceeded the original one by 9.93 kW. Finally, the bench test was conducted to verify the accuracy of simulation results and optional parameters, which showed that the relative error of ridge density was 4.26% and the relative error of power consumption was 5.11%, indicating that the simulated values were basically coincided with testing values, which proved that the modeling and simulating methods adopted met the content requirement.
paddy field; ridger; rotary tillage compacting; numerical analysis; performance optimization
10.6041/j.issn.1000-1298.2017.08.007
2016-12-16
2017-01-10
国家重点研发计划项目(2017YFD0701105、2017YFD0300909-04)
王金武(1968—),男,教授,博士生导师,主要从事田间机械及机械可靠性研究,E-mail: jinwuw@163.com
王金峰(1981—),男,副教授,博士,主要从事田间作业机械研究,E-mail: jinfeng_w@126.com
S225+3
A
1000-1298(2017)08-0072-09