便捷式老人过马路安全车软件系统设计
2017-08-29何晓媛贾美英
郭 松,何晓媛,付 悦,贾美英
(太原科技大学 电子信息工程学院,山西 太原 030024)
便捷式老人过马路安全车软件系统设计
郭 松,何晓媛,付 悦,贾美英
(太原科技大学 电子信息工程学院,山西 太原 030024)
在以AT89C51为控制器的安全车系统硬件平台上设计了安全车模型的软件系统。安全车模型的软件系统主要包括交通信号灯检测子程序,循迹子程序,障碍检测子程序、安全门工作子程序及中断服务子程序。其中交通信号灯检测子程序主要用来检测和识别交通信号灯;循迹子程序主要用来识别轨道信息;障碍检测子程序主要用来检测安全车前方是否有障碍物;安全门工作子程序主要用来实现安全门的开启与关闭;中断服务子程序可以在行驶过程中遇到特殊情况时人为的控制安全车停止。安全车系统模型通过软件系统的控制,可以准确地检测交通信号灯,识别车体周围障碍物,自动循迹前行以及控制安全门的开关,模拟帮助老人通过十字路口。
循迹;交通信号灯检测;障碍检测;中断服务
根据英国健康调查数据显示,有93%的老年女性和84%的老年男性有行走障碍,且目前各十字路口的绿灯时间短,老人过马路很不方便、不安全。据我国交通管理部门的不完全统计,在2015年全国交通事故中,涉及60岁及以上老人的交通事故占总事故的34%。对于这一现象,国内外的各有关部门只是做了一些理论方面的调查分析,提醒老人过马路时多注意周围环境,并没有有效的措施来解决这一问题。因此,设计一款能帮助老人安全过马路的机器模型很重要。本文旨在设计基于安全车系统模型硬件平台上的安全车系统软件,可安全通过自主构建的十字路口,模拟帮助老人过马路。相比于现实生活中老人对于过马路时可能出现的各种问题,安全车可以更加安全便捷地帮助老人通过马路,在一定程度上可以减少交通事故,降低交通隐患,减小交通压力。
1 安全车软件系统设计
1.1 系统的软件设计
在以AT89C51为控制器的安全车系统硬件平台上设计了安全车模型的软件系统。整个系统软件流程图如图1所示,主要包括交通信号灯检测子程序,障碍检测子程序,循迹子程序,安全门驱动子程序及中断服务子程序。安全车软件系统[1]的设计,可以使安全车系统模型顺利通过自主构建的十字路口。安全车系统工作时,在马路对面的交通灯为红灯或黄灯的情况下静止,绿灯亮起时,安全车开始沿设定的轨道循迹前行;在运行过程中,对车体前方100°锥角3 m范围内活动的人体及车体正前方障碍物进行检测,检测到障碍时可以及时停车;安全车行至停靠点,检测到停止标志安全停车,同时打开安全门供老人上下车。如此往返运动,实现安全车模型模拟帮助老人过马路。

图1 主程序流程图
1.2 交通信号灯检测子程序的软件设计
根据系统功能的需求,设计了交通信号灯检测的子程序,主要用来检测交通信号灯的状态。其软件设计流程如图2所示,在马路对面交通信号灯不断变化的过程中,利用光敏电阻对交通灯的状态进行检测:检测到红灯亮时,安全车静止并继续对交通灯进行检测;检测到黄灯亮时,安全车依然静止并继续对交通灯进行检测;检测到绿灯亮时,安全车开始循迹前行。
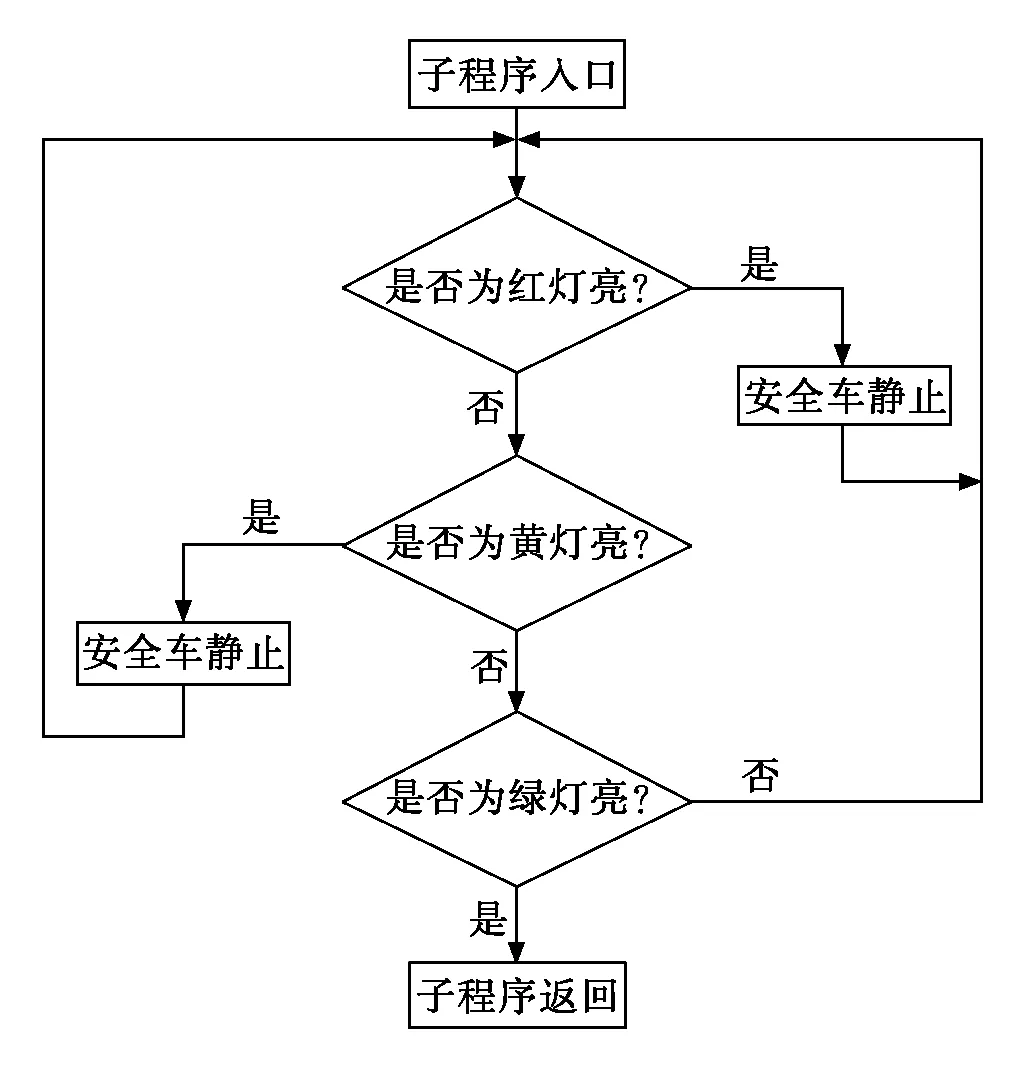
图2 交通信号灯检测的软件流程图
1.3 障碍检测子程序的软件设计
障碍检测子程序主要用来感应安全车前方是否有行人及其他障碍出现,避免冲撞到障碍物导致交通事故的发生。障碍检测的总软件流程图如图3所示。本子程序共分为两个部分:一部分是检测活动人体[2,3]的软件设计,主要用来检测安全车车体前方100°锥角3 m范围内活动的人体;另一部分是检测车体正前方障碍物的软件设计,主要用来检测车体正前方可能出现的障碍物。
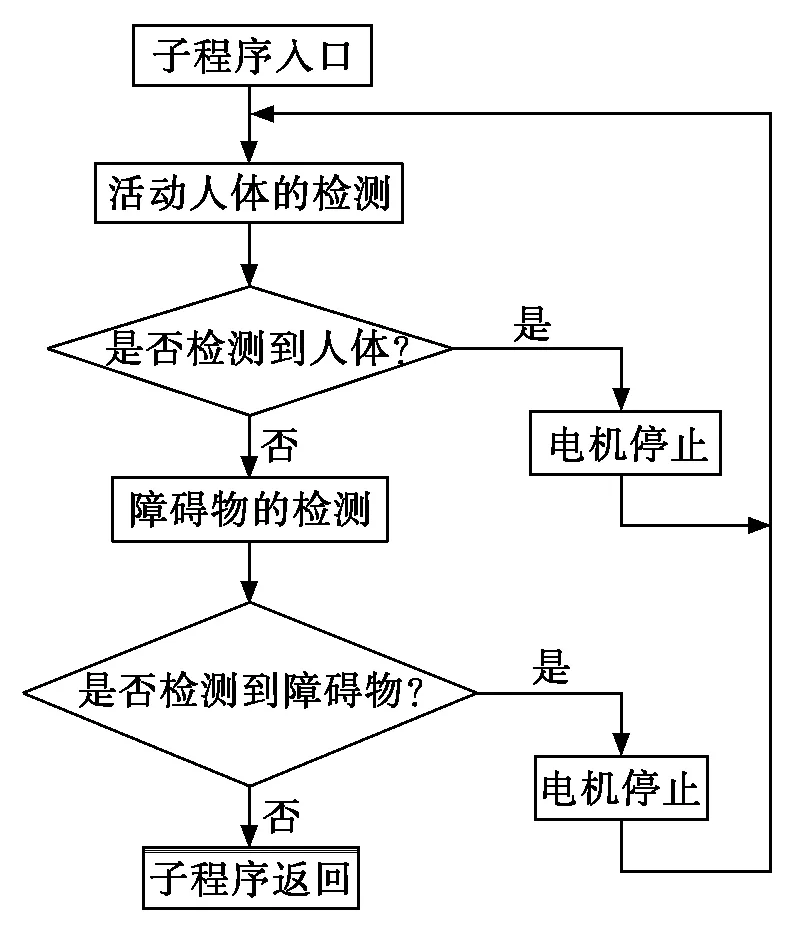
图3 障碍检测的总软件流程图
当行人进入安全车车体前方100°锥角3 m范围内时,利用人体与周围环境温度有温度差,人体的移动会造成外界红外能量变化的原理,PIR检测到移动人体与背景物之间的红外热辐射能量变化并转化为电信号,将信号放大、滤波,滤除噪声干扰,此时模块的输出端将输出高电平,单片机控制安全车停止运行。人离开感应范围时将自动延时关闭高电平,输出低电平,单片机控制安全车继续前行。
车体前方的其他障碍物用红外传感器检测,红外发射管发出一定频率的红外线,当车体前方出现静止行人或其他障碍物时,红外线反射回被接收管接收,经比较器处理后,传感器的输出端口反馈给单片机低电平信号,电机停止,安全车停止前行;直至障碍物消失,发射出去的红外线不再反射回被接收管接收,传感器输出端口反馈给单片机高电平信号,安全车继续循迹前行。
1.4 循迹子程序的软件设计
循迹部分[4-6]用来检测设定安全车运行的黑色轨道位置。根据循迹子程序接收端接收到的反射光线的强弱来判断是黑色轨道还是白色路面,单片机根据传感器反馈回来的检测信息对安全车的行驶方向进行调整,使安全车能够沿黑色轨道运行。

图4 循迹的软件流程图
循迹软件流程如图4所示。循迹子程序采用4个红外传感器,分别置于车的前后两边,为了方便,以安全车为主体分别记为左前、右前、左后和右后。当车前探头工作时,车后探头不工作,车后探头工作时,车前探头不工作。以车前探头工作为例,循迹的情况如下所示:若左前、右前(0,0)都未检测到黑线,安全车直行;若左前未检测到黑线,右前检测到黑线(0,1),安全车右转;若右前未检测到黑线,左前检测到黑线(1,0),安全车左转;若左前、右前都检测到黑线(1,1)即检测到停止标志,安全车停止运行。
1.5 安全门工作子程序的软件设计
在安全车系统模型的运行过程中,若遇到停止的标志(停靠点前方的黑色标志),安全车停止的同时安全门开始工作:单片机控制P1.1口输出低电平、P1.2口输出高电平并延迟0.5 s,驱动连接在安全门门轴上的电机正转来带动安全门的打开;单片机控制P1.1与P1.2口同时输出低电平并延迟20s,使连接在门轴上的电机停止,即安全门的打开状态保持不变,在此期间内,方便老人上下车;单片机控制P1.1口输出高电平、P1.2口输出低电平并延迟0.5s,驱动连接在门轴上的电机反转来带动安全门的关闭(P1.1、P1.2为驱动安全门的驱动输出端连接在单片机上的端口)。
1.6 中断服务程序设计
安全车运行在道路中间的过程中,为了避免突发状况发生时安全车的安全门不能够自动打开,需要在车厢内部和外部分别设计一个开关,可以人为的对安全门进行操控。车厢上开关的设计即为安全车系统中的一个中断[7-9],中断服务程序流程图如图5所示。
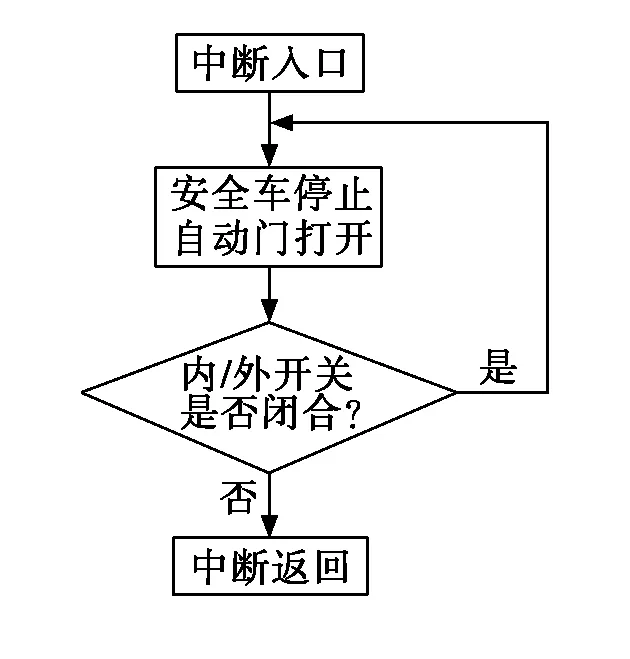
图5 中断服务程序流程图
当突发状况发生时,人为的将内/外部开关闭合,发出中断请求,进入中断服务程序,安全车停止运行且车厢上的安全门打开供老人下车,若开关打开时,系统认为突发状况处理完毕,安全门关闭。
2 软件系统的调试
经多次对安全车软件系统的调试得出:安全车模型可以准确地检测到交通信号灯的状态,在红灯与黄灯亮起时原地等待;只有在绿灯亮起时才开始前行;在前行的过程中,安全车模型可以按设定的黑色轨迹道运行,同时检测安全车车体前方100°锥角3 m范围内的行人及车体前方的其它障碍并伴有提醒行人注意的提示音,在抵达马路两边时,车体上的两个红外传感器同时检测到停止标志(停靠点前方的黑色标志),安全车停止,安全门打开供老人上下车。
在进行检测交通信号灯的调试时发现,安全车系统模型在交通灯变化的瞬间会稍作延迟后再执行下一指令,检测得延迟的时间约为0.5 s,所以最终在安全车识别到绿灯时,约有0.5 s的反应时间,应该把这一反应时间从安全车的运行时间中除去,使安全车模型可以在有效时间内通过马路。
在设计驱动安全车的子程序时,是通过改变使能端的电平高低来改变安全车的运行状态,对调试结果进行记录并分析得到以下结论:使能端ENA、ENB为0时,安全车停止;使能端ENA、ENB为1有效时:IN1、IN2为低电平且IN3、IN4为高电平,安全车向左转;IN1、IN2为高电平且IN3、IN4为低电平,安全车向右转;IN1、IN2、IN3与IN4都为高电平,安全车直行。驱动子程序的调试结果如表1所示。(X代表任意情况)

表1 驱动子程序调试结果记录图
3 结论
本文设计的安全车软件系统可以支撑安全车系统模型实现在自主构建的十字路口模型中模拟帮助老人过马路,可以为现实中老年人安全方便过马路提供一种方式,让老年人不再担心因交通灯绿灯显示时间短而无法通过马路而担忧。通过本文的安全车模型及其软件系统设计,可以呼吁社会上的有关部门更多地关注老人过马路的安全问题,而本文的设计为老人过马路的安全问题提供了一种现代科技的解决手段。
[1] 汪洋,王少宏,李鑫.一种基于STC89C52单片机的简易智能小车的实现[J].电脑知识与技术,2016(7):12-17.
[2] 付丽,吴春鲜,杨隽莹,等.人体及温度感应式电风扇控制系统[J].实验技术与管理,2014(1):83-86.
[3] 赵庭兵.人体感应仪设计与制作初探[J].技术研发,2015(12):22.
[4] 李晓云,何秋生,杨柳,等.多电源供电智能车循迹避障系统的软件实现[J].山西电子技术,2015(6):52-53.
[5] 王琰,郭燕.基于C51单片机的智能循迹小车设计与实现[J].机电一体化,2013(8):8-14.
[6] 张岩,裴晓敏,付韶彬.基于单片机的智能循迹小车设计[J].国外电子测量技术,2014(3):51-54
[7] 龚亚辉,何秋生,张森,等.多电源供电的两轮直立智能车系统设计[J].山西电子技术,2016(1):31-32.
[8] 郑海城,杨冬涛,刘燕,等.基于蓝牙控制的智能小车设计[J].电脑与电信,2016(5):62-64.
[9] 李晓林,苏淑靖,许鸥,等.单片机原理与接口技术[M].北京:电子工业出版社,2015.
The Software System Design of the Safety Vehicle Which Can Help Elderly to Cross the Road Conveniently
Guo Song, He Xiaoyuan, Fu Yue, Jia Meiying
(SchoolofElectronicandInformationEngineering,TaiyuanUniversityofScienceandTechnology,TaiyuanShanxi030024,China)
The software system of the safety vehicle model is designed based on the hardware platform of AT89C51. The software system of the safety vehicle model includes traffic signal detection module, tracking module, obstacle detection module, safety doors drive module and interrupt service module. The traffic signal detection module is mainly used for the detection and recognition of traffic lights; the tracking module is mainly used to track identification information; obstacle detection module is mainly used to detect whether there are obstacles in front of the safety vehicle; safety doors drive module are mainly used to achieve the opening and closing of safety doors; the interrupt service module is mainly used to artificial control the safety vehicle driving in special circumstances. The safety vehicle system model, through the system control software, can accurately detect traffic lights, identify obstacles around the vehicle, automatic track forward and control the switch of the safety door, and help the elderly through simulation crossroads.
tracking; traffic signal detection; obstacle detection; interrupt service
2017-05-25
郭 松(1971- ),男,山西长治人,北京科技大学本科毕业,研究方向:计算机控制。
1674- 4578(2017)04- 0059- 04
TN362;TP212.9
A
