并联式混合动力汽车控制策略分析*
2017-08-20吕建美牛礼民周亚洲王儒
吕建美 牛礼民 周亚洲 王儒
(安徽工业大学)

混合动力汽车(HEV)是在传统汽车的基础上配备了电动机/电池驱动系统的一种新能源汽车,是传统汽车到纯电动汽车的一种过渡车型[1]。控制策略是HEV的核心技术和设计难点,也是HEV能否实用化的关键。并联式混合动力汽车(PHEV)的工作模式主要可以分为电驱动模式、发动机驱动模式、混合驱动模式、再生制动模式以及停车充电模式,这5种模式的互相切换主要依靠控制策略的控制。控制策略能够根据驾驶员的驾驶意图和行驶工况,协调各部件间的能量流动,合理地进行动力分配,提高行驶效率,降低汽车的燃油消耗[2]。目前HEV的控制策略主要分为基于规则和基于优化2类,这2类控制策略几乎能够涵盖所有的控制策略,划分明确。文章对这2类控制策略进行了分析和对比,并对新兴的智能控制策略进行了介绍。
1 并联式混合动力汽车
PHEV的传动结构,如图1所示,其主要特点是发动机和电机根据路况和扭矩的需求不同,同时或单独驱动[3]。由于HEV发展初期技术有限,所以大多数PHEV的能量控制策略都是基于速度的控制。由于这种控制策略简单,容易被工程师理解,所以在HEV中得到了很广泛的应用。但是这种基于速度的控制策略也有其明显的缺点,如控制参数单一,动态性差,不能充分利用混合动力系统的优势,使得整车的燃油经济性没有达到最优。目前根据PHEV是否使用智能算法或优化算法,将其控制策略分为基于规则、基于优化以及智能控制策略3类,如图2所示。

图1 并联式混合动力汽车的传动结构
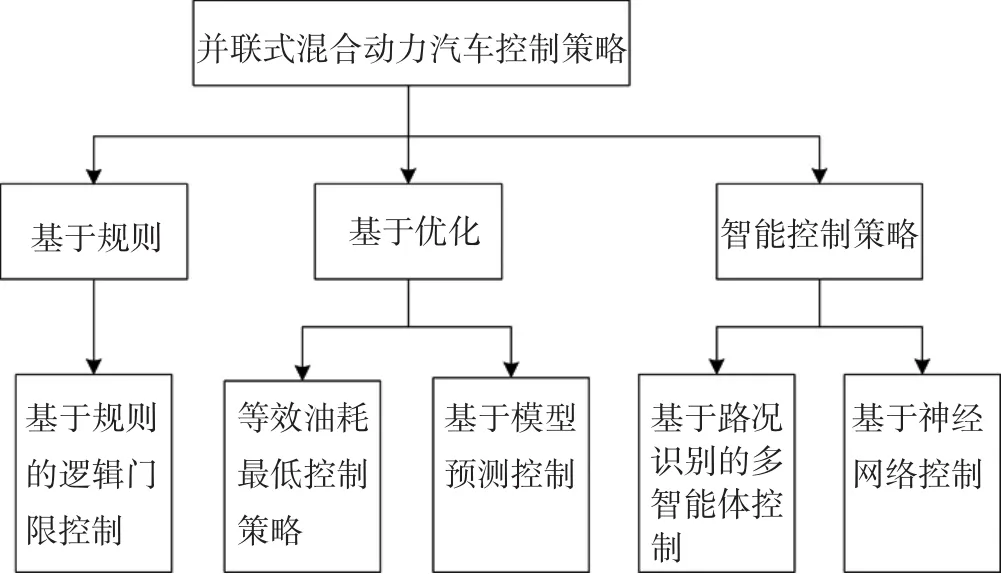
图2 并联式混合动力汽车控制策略分类
2 基于规则的逻辑门限控制策略
基于规则的逻辑门限控制策略的主要思想是,通过基于工程师的经验以及发动机的静态效率曲线图,并选定几个控制变量,如:电池的SOC值、整车的功率需求及燃油消耗量等,然后根据预先设定的规则,判断并选择混合动力系统的工作模式,使汽车尽量在高效区运行。
国内相关研究诸如,文献[4]通过规则的逻辑门限控制策略把发动机的工作区域分为高中低负荷区,结合驾驶员油门踏板开度和开度变化率来计算当前所需求的功率并确定相应的工作区域。这种判断方法思路简单易懂,计算量较小,方法易于实现,但无法适应不同工况的变化和实际动态变化的需求,适应性不强。文献[5]利用模糊逻辑控制技术,在MATLAB软件的模糊逻辑工具箱中设计了模糊控制器,提出了一种既能够实现需求转矩又能在发动机和电机之间实现最优分配的模糊逻辑控制策略,在ADVISOR软件上进行了仿真。结果表明,模糊逻辑控制策略能够在一定程度上提高PHEV的燃油经济性,且有良好的鲁棒性。
国外研究状况包括,文献[6]描述了基线能量管理策略,当电池SOC值较低时,电机对电池充电。基线能量管理策略能够降低油耗,维持电池SOC平衡,被广泛应用于PHEV,进一步提高了控制策略的燃油经济性并降低排放。文献[7]把基于规则的控制策略分为聚类算法和规则定义2个阶段。第1阶段首先运用聚类算法生成簇集,再用最小化目标函数去识别簇集;第2阶段用遗传算法得出最佳簇集的大小,然后利用控制器进行优化。最后在一些工况上进行了测试,结果表明,汽车的燃油性得到了很好的提高,但整个控制策略的计算量很大,程序复杂。文献[8]提出了一种动态规划(DP)优化的控制方法,把这种方法与模糊控制策略结合。为了提高这2种结合控制策略的实用性和满足城市驾驶模式的多样性,提出了一种城市驾驶模式的识别方法。最后把这种控制策略与传统基于规则的控制策略相比较。模拟结果表明,通过采用提出的控制策略,PHEV的燃油效率更高,并且在不同的城市循环期间,电池的SOC值能够保持平衡,这种控制策略只是在城市工况下进行了测试,在其他复杂工况下的工作情况还需要进一步测试。
综上,基于规则的逻辑门限控制策略算法简单,易于实现,但是从最优控制理论上讲,该控制规则不能实现能量的最优分配,也未考虑实际工况的动态变化。
3 瞬时优化控制策略
瞬时优化控制策略也被称为实时控制策略,该策略的核心思想是在汽车行驶的每个瞬时时刻,计算所有满足驾驶员需求的发动机和电动机的输出转矩组合以及所对应的燃油消耗量和电力消耗量,将该瞬时燃油消耗表示为发动机燃油消耗的等效燃油消耗。瞬时优化控制策略一般分为等效油耗最低控制策略(ECMS)和基于模型预测的控制策略。
3.1 等效油耗最低控制策略(ECMS)
ECMS要求将电动机的能量损耗转换为等效的发动机油耗,得到类似于发动机万有特性图的电动机损耗图[9]。目前常用的ECMS包括基于SOC变化量和基于工作效率2种。
国内学者对ECMS进行了进一步的研究。文献[10]提出当车载蓄电池组的SOC值达到设定的SOClow时,发电机开始工作,得到消耗的电能与发动机未来时刻补偿这些能量而消耗的燃油之间的等价关系,再对每一时刻发动机实际消耗的燃油与电池等效燃油消耗的总和进行优化,让它们达到最低值。虽然采用ECMS时,可以获得良好的燃油经济性并提高整车性能,但是该研究所针对的行驶工况只是城市生活中日常上下班的短途行驶兼顾偶尔长途旅行,并不能适应于所有工况。文献[11]从另一个角度出发,利用ADVISOR软件建立瞬时油耗计算的重要参数模型,分析出最佳的瞬时油耗优化表达式,用再生制动对电池电能补偿效应进行修正,建立瞬时ECMS的目标函数,最后在ADVISOR软件对其进行验证。虽然验证结果表明采用该方法得出的瞬时等效油耗精度较高,参数计算较准确,但该算法还需要在实车上进行测试,才能验证其真实可行性。
国外研究者也对ECMS进行了改进。文献[12]建立了基于工作效率的等效油耗模型,根据发动机、电机与电池的平均工作效率以及当前时间步长的实时工作效率来计算在电池充放电情况下的电机等效油耗。文献[13]依据发动机燃油消耗、电机扭矩和SOC变化量三者的关系推导出对应电机扭矩的等效油耗,并考虑电池充放电损失和制动再生电能的影响,建立了基于SOC变化量的等效油耗模型。文献[14]把ECMS应用到PHEV的巡航模式,并且提出了一种基于模型预测控制(MPC)的新型燃油消耗优化算法,该算法可以使汽车在巡航模式下减少计算量,降低车的燃油消耗。文献[15]将ECMS与逻辑门限策略相结合,形成自适应能量管理策略,这样不仅能缩短仿真时间、维持电池SOC稳定,还能有效地改善汽车的燃油经济性和排放性。
结合国内外的研究可知,ECMS不需要预先知道工况情况,计算量较小,能够有效节省PHEV的油耗,且便于对能量进行控制,拥有较好的应用前景,但无法兼顾到全局最优,且容易受到电池老化的影响,在实际汽车控制中的实现难度较大。
3.2 基于模型预测的控制策略
基于模型预测的控制策略指根据预测的模型对未来系统代价函数进行预测,通过对未来预测区间内的性能指标进行优化,并根据实测对象的输出进行反馈校正,将控制策略转化为优化过程,通过求解相应预测区间的优化问题得到控制序列,并将序列的第1个控制量作用于系统,实现反馈控制,在下一个采样时刻,将预测区间向前推进一步,之后不断重复该过程。
国内方面,文献[16]基于车载导航系统建立汽车未来一段行驶路线上的汽车运行状态模型,将模型预测控制与动态规划相结合,建立了中度HEV的燃料经济性预测控制计算模型,最后运用C语言与MATLAB/Simulink进行联合仿真,验证了所建立的算法可以满足实时控制的要求,且采用该预测控制策略的中度HEV具有显著的节油效果。文献[17]把模型预测控制与最优控制策略相结合,得出PHEV能量管理模型预测最优控制策略。先确定发动机最优工作线,再运用所建立的数学模型和公式化控制策略求解最优控制问题,最后把求得的最优控制序列的第1个控制量应用在系统中。这2种方法都可以实现汽车在行驶过程中的优化控制,显著提高汽车的燃油经济性,但都只是在仿真软件中进行了模拟,并没有得到实际的验证。
国外方面,文献[18]以HEV应用的基于模型预测的控制策略为基础,介绍了模型预测的方法并讨论了其优点,提出了可能影响模型预测控制策略的因素,包括预测精度、设计参数及求解器等。基于模型预测的控制策略在很大程度上提高了动态规划的计算效率,能显著提高燃油经济性,但是其算法的鲁棒性不强。
综上所述,瞬时优化控制策略不需要提前知道整个行车工况,计算量比较小,且实时性更高,但是瞬时优化控制策略无法实现全局优化,若为了兼顾全局优化和瞬时优化,势必会损失一些性能。
4 智能控制策略
智能的基本出发点是模仿人的某些行为或思想,具体表现为记忆、学习、模仿、适应、联想、语言表达、文字识别、逻辑推理、归纳总结及综合决策等各种能力[19]。随着人工智能技术和计算机技术的发展,已经有研究者把自动控制和人工智能以及系统科学中一些有关学科的分支如:系统学和运筹学等结合起来,建立了一种适用于比较复杂系统的控制理论和技术,即智能控制。智能控制技术具有自适应、自学习及自组织等优点,可以解决很多工程上用传统方法不能解决的问题。为了改善目前现有HEV控制策略存在的缺陷,近年来,研究者提出将智能控制应用于HEV的控制中。
4.1 基于博弈论控制策略
博弈论又被称作对策论,它是现代数学的一个分支,也是运筹学的一个重要学科。博弈论是指2人在平衡的对局中各自利用对方的策略来变换自己的对抗策略,以达到取胜的目的。博弈论充分考虑游戏中的个体预测行为和实际行为,并研究它们的优化策略,利用这一特点,研究者把发动机和电机看成游戏的参与者,将整车功率控制看成参与者之间的合作博弈行为。
目前,将博弈论应用到PHEV控制策略中的研究较为缺乏,比较有代表性的是文献[20]的相关研究,把PHEV的各种操作看成是驱动程序和动力总成的一种非合作性博弈,在设计过程中应用了基于规则和基于动态规划的思想,仿真结果表明,这种方法能够很好地降低燃油消耗率。国内的一些学者也把博弈论的思想引入PHEV,提出了自己的想法。文献[21]在建立博弈进化模型的基础上,提出了基于行为博弈论的博弈进化算法,并针对不同的行驶工况设计了不同的学习模型:模仿学习与信念学习算子。把博弈进化算法应用到HEV控制策略中,通过Visual Studio调用MATLAB及ADVISOR,实现了一款ADVISOR内置的“PARALLEL_defaults_in”车型的控制策略优化。
由以上研究可知,虽然基于博弈论的控制策略能够减少HEV的燃油消耗,降低污染物的排放,使HEV各项性能指标均有不同程度改善,但是这种算法和思想在计算和处理的过程中比较耗时,在实际应用中,必须要提高思想的并行化,在仿真测试中,能够测试的问题有限,还需设法测试不同类型的参数来验证基于博弈论控制策略的性能。
4.2 基于多智能体控制策略
智能体是一种具有智能性和自适应性的实体,这种实体可以是智能软件、智能设备或智能机器人等。它能代表用户或其他程序,以主动服务的方式完成一项工作。多智能体系统(MAS)是一个能够耦合的智能体网络,这些智能体能够通过交互、协作等方式对一些问题进行求解。其中每一个智能体既是单独的又是相互联系的。智能体系统有着很多的特性,如自主性、交互性、反应性以及互动性等。已经有研究证明了多智能体系统的思想符合HEV控制策略的管理和优化[22]。可以利用智能体系统的这些特性来对HEV进行能量的管理和控制。一般根据爬坡度以及节气门开度把汽车行驶的路况分为乡村、城市和高速,工况判别规则,如表1所示,可根据表1来判断PHEV的行驶路况。

表1 汽车行驶工况判别规则表
文献[23]以PHEV为研究对象,建立动力总成部件子系统智能体模型,构建了多智能体系统协调控制框架,根据不同工况模式对总成动力进行分配,利用单智能体的智能行为和多智能体的协作能力解决了汽车对复杂路况的自适应问题,具体情况如图3所示,并在Cruise软件上对其进行了仿真,结果表明这种策略可以改善整车的燃油经济性和动力性,但这只是一个初步的总体构想,若要真正应用到HEV中还需要相关技术的进一步支持。

图3 基于多智能体的控制策略
虽然把智能体系统应用到HEV中能够有效改善整车燃油经济性和动力性,对于PHEV的控制有诸多优点,但是目前对多智能体系统的研究还比较少,不够成熟。
4.3 基于神经网络控制策略
神经网络控制指的是把神经网络技术应用到控制系统中,对难以精确控制的对象进行优化计算或者作为控制器起控制作用或对对象进行故障诊断。神经网络有很强的鲁棒性、自适应性以及容错能力。
文献[24]建立了基于Takagi-Sugeno模型的模糊神经网络,通过对模糊神经网络进行训练,生成了驾驶意图模糊推理规划。从仿真结果可以得出,得到的模糊推理规则可以很好地识别驾驶意图,并能进一步提高HEV的燃油经济性。文献[25]采用传统瞬时优化策略基于离线仿真试验采集数据以训练小波神经网络,并用训练好的小波神经网络控制器实现该策略,从而提出了一种基于小波神经网络的PHEV实时控制策略。这种控制策略不仅能够保证汽车的燃油经济性,而且克服了瞬时优化策略难以实时控制的缺点,但该控制策略的优化性能不是很强,优化性能还需要进一步改善。
文献[26]利用神经网络开发了一种应用于HEV的能源管理系统,并对该管理系统进行了开发和测试,结果表明该系统能够最大限度地减少汽车的能源需求,并且能与不同的主要动力来源工作。文献[27]从城市公交车的运行路线固定这一特点出发,引入单参数长度比,设计了一种基于长度比例神经网络的插电式混合动力城市客车在线控制策略,并进行了仿真,结果表明这种策略可以大大降低总成本和电荷消耗,缩短充电时间。这2类都是利用神经网络设计了一种新的控制策略,能够有效提高HEV的能源利用率,若要将该控制思想与方法进行实际应用则还需进行改进与完善。
结合以上研究,基于神经网络的控制策略能够弥补传统优化策略计算复杂和实时性差的缺点,并且能够识别驾驶员的驾驶意图,可以有效优化HEV的控制策略,但其优化性能还不是很好,对于HEV在行驶过程中的优化问题还需要进一步的改善。目前所研究的智能控制更多的是基于知识,利用专家的经验、逻辑推理及学习能力来进行控制,以定性分析为主与定量分析相结合的控制方式。这种控制方式在技术方面还不是很成熟,目前还不能普遍应用于HEV中。
5 结论
整车控制策略的综合性能和优化能力对于改善HEV性能有着至关重要的作用。目前已经开发的控制策略各具优缺点,互补性很强,但都没有达到最优。结合国内外对于HEV控制策略的研究分析可知:1)可以利用目前已有的各种控制策略优势,实现集成控制,让控制策略能够最大限度地发挥其优点,提高控制系统的综合性能。2)为了获得更好的控制效果,可以开发探索更适用于HEV的智能控制策略。智能控制的关键技术是智能化,将优化算法和智能控制相结合是解决控制策略问题的关键。
