四轮独立驱动电动汽车仿真平台开发*
2017-08-20郝亮
郝亮
(辽宁工业大学)

能源与环境压力使得电动汽车成为目前世界汽车工业研发焦点[1]。如果能够建立一个基本反映汽车各项动力学性能的电动汽车整车动力学仿真平台,对于电动汽车底盘集成控制、快速高效地完成系统内各主要机构的匹配及整车动力学参数的优化等方面研究具有重要意义。文献[2]建立了7自由度模型,对四轮轮毂电机电动汽车的稳定性进行了研究;文献[3]建立了非线性9自由度整车非线性模型,对弯道制动工况下模型跟踪控制对改善四轮驱动电动汽车整车稳定性控制进行了研究;文献[4]建立了包括转向角在内的18自由度四轮独立驱动电动车动力学模型,通过仿真与试验对比,对模型精确反映汽车各种工况下的动力学性能进行了验证;文献[5]建立了15自由度四轮轮边独立驱动电动汽车整车模型,其中包括了近似为1阶滞后电机响应特性模型,同时考虑了摩擦损失,对驱动效率进行了重新设置;文献[6]基于MATLAB/Simulink搭建了不考虑垂向运动的四轮独立驱动/独立转向整车动力学仿真模型,对其特有的蟹行、斜行及原地转向工况进行了仿真,验证所建模型能较好反映出电动车的动力学响应特性;文献[7]采用ADAMS与Simulink联合仿真,对轮边电机驱动电动汽车直线加速、转向及制动等典型工况下的行驶性能进行了仿真,验证了驱动控制策略的有效性。综上所述,文章采用CarSim/Simulink联合仿真的方式研究电动汽车在不同工况下的转向和驱动特性,对于后续电动汽车的控制特性研究提供了更加高效的基础研究平台。
1 整车仿真平台结构
文章采用轮边电机独立驱动全新的驱动系统(如图1所示),其关键技术之一是动力学及牵引力集成控制问题,主要研究在满足汽车各项动力学性能基础上的各轮驱动力的分配策略[8-9]。四轮分别由4个独立的轮边电机驱动,蓄电池替换了传统汽车中的发动机,其输出的动力(扭矩)通过轮边驱动电机直接传递给车轮。将轮边驱动电机和轮边转向电机集成为轮边电机驱动系统,控制器接收轮边驱动电机和轮边转向电机的转速及扭矩等电信号,以及位置传感器的位置信号。
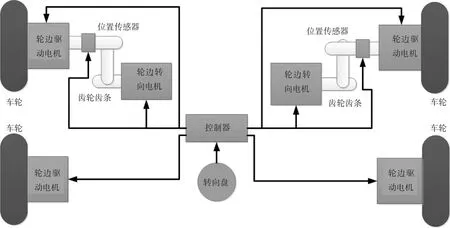
图1 仿真平台整车结构形式
2 电动汽车线控转向系统和轮边电机驱动模型设计
由图1所示电动汽车整车结构形式构建需求,在CarSim自带传统整车模型基础上,进一步改造其转向系统为线控转向(SBW)系统,驱动动力是由四轮轮边电机提供的。根据需求,确定两者精确的数学模型,这是进行正确联合仿真的前提。
2.1 线控转向系统结构设计
SBW系统通过轮边转向电机接收控制器控制信号,经减速增扭带动转向横拉杆和转向节臂,转向节将其运动传递至车轮,能够控制两前轮转角达到期望值,由此可知,该功能由前方两侧轮边转向电机和传动机构共同完成。由于两侧车轮的SBW结构相同且对称布置,在建模过程中忽略制造及装配误差,只是取单轮结构进行研究(如图2所示)。

图2 电动汽车的转向执行机构模型图
对于图2中的单侧轮边转向执行机构,在分析过程中,主要考虑转向电机的电机转角、减速增扭机构(齿轮齿条机构)的线位移及前轮转角3个参数。
2.2 轮边转向电机数学模型建立[10-11]
对于特定的汽车工况,轮边转向电机负责输出需要的扭矩,此过程由电机的输出轴产生电磁力矩实现,电磁力矩主要通过减速增扭机构输出至车轮,剩余部分用于克服起动时的惯量和运行时的阻尼作用,故轮边转向电机模型可由式(1)描述。

式中:θse——转向电机的电机转角,(°);
Tmw——转向电机的输出力矩,N·m;
Jmw——转向电机的转动惯量,kg·m2;
Cmw——转向电机的滚动摩擦阻尼系数;
Tew——轮边转向电机的阻力矩,N·m;
Km——转向电机的电机轴扭转刚度,rad/m;
i1——转向电机的减速比;
rs——转向器小齿轮分度圆半径,m;
St——减速增扭机构(齿轮齿条机构)的线位移,m。
2.3 转向执行总成数学模型建立
车轮转动时,减速增扭机构将电机的旋转运动转换为平动,并拉动车轮绕主销运动。选择齿轮齿条作为减速增扭机构的传动部件,齿轮齿条机构的运动方程,如式(2)所示。

式中:mg——减速增扭机构中齿条的质量,kg;
Bg——减速增扭机构中齿条的粘滞阻尼系数;
Kg——减速增扭机构中齿条的刚度,rad/m;
ig——减速增扭机构中齿条至前轮的总传动比;
ηp,ηn——减速增扭机构的正逆向传递效率;
Sg——齿条移量,m;
i2——齿轮齿条传动比;
Tkw——前轮处主销传递的力矩,N·m;
Kw——车轮的轮胎刚度,N/rad;
θw——车轮转角,(°)。
减速增扭机构中的齿条带动转向节臂,使前轮分别绕其主销进行转动,转向节通过球轴承与转向节臂连接,并带动单侧前轮绕主销运动的动力学方程,如式(3)所示。

式中:Jwz——车轮绕主销沿z方向的转动惯量,kg·m;
Cw——车轮绕主销的滚动摩擦阻尼,N/m;
Tfw——车轮的转向阻力矩,N·m。
2.4 线控转向系统简化数学模型建立
轮边电机驱动系统中的转向机构,由于加入了减速增扭机构,故系统的自由度增加,模型分析及其设计也随之复杂。根据SBW系统的工作原理,将轮边电机驱动系统中的减速增扭过程进行简化,将角传动按照线性特性处理,传动比为is,轮边转向电机的电机转角,如式(4)所示[12-13]。

式中:is——转向系传动比。
去掉传动机构,只考虑减速增扭机构的传动比,轮边转向电机输出力矩直接作用在前轮的主销上,得到转向电机输出轴的动力学方程,如式(5)所示。

式中:G——减速器传动比;
Ts——转向电机的输出力矩,N·m。
Ts通过主销作用在前轮上,将Tfw等效为前轮的主销输出端,得到动力学方程式,如式(6)所示。

式中:Rp——前轮的扭矩放大因数。
综上,得到电动汽车线控转向系统的简化模型,如式(7)所示。

式中:Rs——减速器输出轴到主销的传动比;Jmz——转向系统的转动惯量,kg·m2。
Ts包括机械结构自身的摩擦阻力矩、前轮与路面间的摩擦力矩及前轮变形产生的回正力矩。由于在线控转向过程中,回正力矩起主要作用,在此忽略其他2个摩擦力矩,主要研究回正力矩的求解和作用。
由于汽车回正力矩的产生原因较复杂,获得精确的物理模型较为困难,故采用参数化的经验或半经验公式进行拟合,以保证汽车回正力矩的计算精度。
2.5 轮边驱动电机数学模型建立
通过建立精确的电机模型,对于提高仿真精度具有重要意义。由于这种电动汽车仿真平台是集成控制很好的研究载体,因此,为了后续研究,在这里可将电机模型简化为包含扭矩-转速特性和电机的功率损耗特性的2种特性模型。
电机的扭矩-转速响应特性为电机的外特性,需要通过力矩输出限制以及1阶惯性环节,得到电机的扭矩-转速响应特性,如式(8)所示。

式中:Tmax——特定转速下轮边电机的最大输出扭矩,N·m;
Treq——期望扭矩,N·m;
Tme——轮边电机的输出力矩,N·m;
S——进行相应拉普拉斯变换的符号;
τ——2阶控制系统的时间常数,可以通过具体的试验获得。
电机的功率损耗特性需要通过电机的外特性MAP图描述。首先通过实车试验获得电机扭矩-转速下的电机效率MAP图,再根据特定的扭矩和转速获得当前的电机效率。电机的输出功率为转速与转矩的乘积,需求功率计算,如式(9)所示。

式中:T——电机工作时间,s;
n——电机转速,r/min;
η——电机传动效率;
Ji——电机转动惯量,kg·m2。
3 CarSim与MATLAB/Simulink整车动力学仿真平台建立
通过上面建立的线控转向和轮边驱动电机模型的数学模型,可建立Simulink的线控转向和轮边电机驱动的仿真模型。采用CarSim与MATLAB/Simulink联合仿真,完成轮边电机四轮独立驱动电动汽车整车仿真平台的搭建(如图3所示),结合CarSim的仿真结果观察器,采用Watch_Window模块观察模型中关键参数的仿真结果。

图3 轮边电机四轮独立驱动电动汽车整车联合仿真模型图
4 仿真试验验证
4.1 New York工况下轮边驱动电机仿真验证
New York城市循环工况是基于ADVISOR软件的提取工况。在离线仿真中,通过该工况验证此电动汽车整车动力学模型的合理性和有效性。Cyc_New York Bus工况下车速历程曲线,如图4所示;轮边电机扭矩分配时间历程,如图5所示。

图4 Cyc_New York Bus工况下车速历程曲线图

图5 轮边电机扭矩分配时间历程曲线图
由图4和图5可知,搭建的电动汽车整车动力学仿真平台可以很好地跟随New York城市循环工况,轮边电机具有良好的驱动特性,可以满足一般驱动工况要求。
4.2 稳态圆周转向试验
为验证基于转向电机的电机模型的合理性,采用基于驾驶员开环控制的稳态圆周转向试验进行测试,图6示出稳态圆周转向试验下的测试结果。

图6 稳态圆周转向试验测试结果
由图6可知,基于轮边转向电机的稳态圆周试验测试工况下,转向电机可以良好地驱动转向车轮进行转向,进而实现特定的转向输入要求。由于尚未施加控制算法,转向电机扭矩波动较大,但可以有效和合理地反映转向盘转角的输入要求。
5 结论
针对轮边电机的四轮独立驱动电动汽车的特点,根据研究的需求建立了精确反映线控转向系统和轮边驱动电机特性的数学模型,采用CarSim与MAT LAB/Simulink联合仿真的方式,构建了具有线控转向的轮边电机四轮独立驱动的整车动力学仿真平台,在提高开发效率的同时,较为深入地研究了分布式电动汽车中轮边电机+线控转向机构的模型机理。结果表明:在未加控制算法的前提下转向和驱动系统在进行整车匹配研究时,均能较好地体现出自身规律特性,能够保证转向和驱动动作实现。这可为四轮轮边电机电动汽车控制算法的改进及性能验证提供良好的平台。
