足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形的临床分析
2017-08-16郑炳铃王健尹靖宇徐涛
郑炳铃 王健 尹靖宇 徐涛
足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形的临床分析
郑炳铃 王健 尹靖宇 徐涛
目的 探讨足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形的临床疗效。方法 28例(42足)脑瘫马蹄足部畸形患者, 均行足三关节融合术联合康复训练治疗, 观察手术治疗效果。结果 患者骨性愈合时间为7~12周, 手术后没有感染等并发症和过度矫正, 42足中, 优12足(28.57%)、良24足(57.14%)、可4足(9.52%)、差2足(4.76%), 优良率为95.24%。患者手术后步速和左右步幅差均优于手术前,差异均有统计学意义(P<0.05)。结论 足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形疗效确切,对纠正足部畸形、稳定关节、改善肢体运动是行之有效的方法, 术式的精心设计, 术中技巧及术后康复训练对疗效较为重要。
足三关节融合术;康复治疗;脑瘫马蹄足部畸形
脑瘫马蹄足部畸形是骨关节常见的畸形, 发生率在1/1000左右, 目前的研究中[1], 尚未明确马蹄足的原因, 基因混乱是最大的可能, 临床上大多是足内翻、下垂、内收畸形导致, 主要表现为内旋、前足内收、后足马蹄等, 男性的发病率高于女性, 单侧和双侧均可发生。临床上对于脑瘫马蹄足部畸形的治疗, 还存在一定的争议, 但是普遍认为应该尽早的进行治疗[2], 需要在儿童阶段行矫正治疗, 如马蹄内翻足发展到成人阶段, 骨关节畸形加重、软组织挛缩, 关节的生理和病变改变更加明显, 增加了临床治疗的难度。本文主要研究足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形的临床效果, 现报告如下。
1 资料与方法
1. 1 一般资料 选取2014年4月~2016年4月本院收治的脑瘫马蹄足部畸形患者28例(42足), 其中男16例, 女12例,年龄17~44岁, 平均年龄(25.3±6.5)岁, 其中14例双侧, 14例单侧, 单侧中8例为右足、6例为左足。X线片检查中, 21足为重度, 前后位在5°以内, 侧位在10°以内, 21足为中度, 前后位及侧位均在10~15°之间, 依据Dimeglio标准, 18足为Ⅳ级、24足为Ⅲ级。
1. 2 方法 患者均行足三关节融合术联合康复训练治疗。手术前对患者进行常规检查, 行足侧位、正位DR片拍摄或CT三维重建, 了解患者足内翻的角度和下垂情况, 确定截骨的部位和角度, 如患者的皮肤出现了溃疡, 要尽早的进行手术。患者行硬膜外阻滞麻醉或者全身麻醉, 保持仰卧位, 垫高患者的臀部, 让患者的膝关节微屈, 小腿内旋, 先对患者的跟腱延长, 进行Z形切片处理, 待三关节融合后, 再确定跟腱的长度和缝合等。如患者有高弓足, 要在跖腱膜内2/3处切断, 足背外侧作弧形切口, 外踝2 cm经过骰关节, 直到跟距关节为止。从骨面游离的上下缘皮瓣接近, 充分暴露跟距关节、距舟的, 通过电锯或骨刀等截骨, 保证楔形骨块的底部在外侧, 而尖部在内侧, 把跟、距、舟和骰4块股3个关节截骨, 确保骨面整齐, 矫正保证足部中立位。矫正完成后, 通过骑缝钉或者2 mm的克氏针, 对距舟、跟骰和跟距关节固定, 手术后常规进行石膏固定, 2周后拆线, 更换固定的石膏, 待患者三关节骨性愈合后, 患者能够行走就可以拆除石膏。然后行术后康复训练, 练习行走的功能, 康复期通常在5个月左右, 如患者的下肢长度不同, 可以用增高鞋、矫形鞋等, 而踝关节不稳定患者, 通过踝足矫形器辅助行走。
1. 3 观察指标和疗效判定标准 观察患者的步速和左右步幅差, 以及治疗的效果。治疗效果结合患者的临床表现和X线片, 分为优、良、可、差[3], 优:畸形矫正效果显著, 患者对外观满意, 能够穿普通的鞋, X线片显示, 融合关节骨性完全愈合;良:畸形改善明显, 外观比较满意, 关节比较稳定,行走游离, 但是无法长时间行走, X线片结果同优;可:与手术前相比, 行走的步态和足部外观都有一定的改善, 但是上下楼梯和快速行走时不稳, 剩下的问题不需要二次手术, X线片显示1个关节没有达到骨性愈合;差:患者足部没有显著的改变, 行走步态仍然不稳定, 需要二次手术矫正, X线片显示骨融合较差。优良率=(优+良+可)/总例数×100%。
1. 4 统计学方法 采用SPSS19.0统计学软件进行统计分析。计量资料以均数±标准差()表示, 采用t检验。P<0.05表示差异具有统计学意义。
2 结果
2. 1 治疗效果 患者骨性愈合时间为7~12周, 手术后没有感染等并发症和过度矫正, 42足中, 优12足(28.57%)、良24足(57.14%)、可4足(9.52%)、差2足(4.76%), 优良率为95.24%, 2足差的手术前评级均为Ⅳ级, 二次矫正治疗后效果为可。
2. 2 步速和左右步幅差恢复情况 患者手术后步速和左右步幅差均优于手术前, 差异均有统计学意义(P<0.05)。见表1。
表1 手术前后患者步速、左右步幅差比较(, n=28)
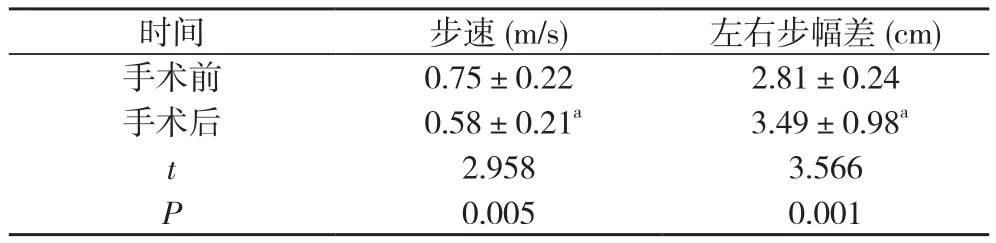
表1 手术前后患者步速、左右步幅差比较(, n=28)
注:与手术前比较,aP<0.05
时间步速(m/s)左右步幅差(cm)手术前0.75±0.222.81±0.24手术后 0.58±0.21a3.49±0.98at 2.9583.566 P 0.0050.001
3 讨论
引发马蹄内翻足的原因有很多, 如果患者早期没有得到及时、有效的救治, 就会发生严重的急性, 对患者的身心健康产生不良影响, 也增加了家庭和社会的负担[4]。足三关节融合术是对骰、跟、距舟和跟距关节, 三关节融合处理的方式, 在治疗的过程中, 行跟腱延长和胫前肌腱移位, 在改善患者足急性外观的同时, 提高患者的肌力, 避免手术后的复发。本文的研究结果表明, 通过足三关节融合术治疗的患者,优良率达到了95.24%, 只有2足治疗效果为差, 再次手术后治疗效果达到可。因此, 该手术在脑瘫马蹄足部畸形治疗中效果显著, 但是考虑到患者的关节组织固定或粘连, 足部的一些功能会永久的丧失, 手术的适应症必须严格的把控。有学者通过研究认为[5-7], 足三关节融合术使用12岁以上的患者, 尤其是马蹄内翻严重者, 也有学者研究发现[6,8-10], 8岁以上的患者采用该手术治疗, 治疗效果也非常显著。
综上所述, 足三关节融合术联合康复训练治疗脑瘫马蹄足部畸形疗效确切, 对纠正足部畸形、稳定关节、改善肢体运动是行之有效的方法, 术式的精心设计, 术中技巧及术后康复训练对疗效较为重要, 值得在临床上推广应用。
[1] 刘昆, 梅海波, 赫荣国, 等. 应用Ilizarov技术治疗儿童复发性僵硬型先天性马蹄内翻足. 临床小儿外科杂志, 2016, 15(6): 535-539.
[2] Frost NL, Grassbaugh JA, Baird G, et al. Triple arthrodesis with lateral column lengthening for the treatment of planovalgus deformity. Journal of Pediatric Orthopedics, 2011, 31(7):773.
[3] 韦有万, 彭智, 梁杰, 等. 三关节融合术在成人严重高弓足内翻畸形功能重建中的应用. 广东医学院学报, 2012, 30(3):254-257.
[4] Mazis GA, Sakellariou VI, Kanellopoulos AD, et al. Results of extraarticular subtalar arthrodesis in children with cerebral palsy. Foot & Ankle International, 2012, 33(6):469-474.
[5] 胡健, 李洪鹏, 吴冰, 等. 三关节融合应用跟骨异型钢板固定结合软组织手术治疗小腿缺血性肌挛缩后遗马蹄足畸形. 中国伤残医学, 2016, 24(10):14-16.
[6] 庞润明, 刘晓帅. 三关节融合术后远期疗效观察及术式探讨.山西职工医学院学报, 2012, 22(3):45-46.
[7] 李大伟, 于洁. 三关节融合术治疗成人马蹄内翻足的临床体会.养生保健指南, 2016(16):13.
[8] 张伟, 黄耀添, 王军, 等. 三关节融合术治疗儿麻后遗马蹄内翻足远期效果综合分析. 中国矫形外科杂志, 2000, 7(11):1048-1051.
[9] 黄长智, 杨效宁, 刘大诚, 等. 三关节融合术治疗成人先天性马蹄内翻足的疗效分析. 医药前沿, 2012(29):99-100.
[10] 张会生, 贾卫斗, 刘军玺. 三关节融合术治疗马蹄内翻足畸形38例治疗体会. 实用骨科杂志, 2000(2):136.
10.14164/j.cnki.cn11-5581/r.2017.15.023
2017-06-01]
510510 广东三九脑科医院脑瘫中心
