微扑翼驱动机构设计与运动学分析
2017-08-12徐兵陈强王伟
徐兵陈强王伟
(巢湖学院,安徽 巢湖 238000)
微扑翼驱动机构设计与运动学分析
徐兵陈强王伟
(巢湖学院,安徽 巢湖 238000)
文章提出了一种新型扑翼驱动机构,模仿昆虫的扑翼运动。用Solidworks进行参数化建模,并导入ADAMS进行运动学仿真分析。机翼在扑动过程中的扑动角度、角速度和角加速度随时间成正弦变化,具有较好的对称性,为后续扑翼机的制作提供有力参考。
扑翼驱动机构;Solidworks;ADAMS;运动学仿真
1 前言
扑翼飞行器是一种模仿自然界飞行类生物(如鸟、昆虫等)依靠扑动机翼产生飞行动力的飞行机器人。扑翼飞行器以其良好的机动性、低噪音、低成本等功能,在国内外受到广泛的关注,无论是军事还是民用领域都将有着广阔的应用前景[1-2]。近年来,随着实验手段的不断完善、流场显示技术的发展以及数值仿真方法的应用,研究者对扑翼驱动机构的设计越来越多元化。美国乔治亚理工大学研制的微型飞行器Entomopter[3],它有两对机翼,使用往复式化学肌肉驱动。美国加州大学伯克利分校研制的微机械飞虫MFI[4],采用压电石英驱动扑翼上下运动。德国的FESTO公司研制出一款尺寸较大的扑翼飞行器Smartbird[5],采用的是折叠翼扑动方式,驱动机构是一个平行连杆机构,同时翼尖有扭转运动,实现空中飞行运动。目前,国内研究者设计的扑翼驱动机构多采用单曲柄双摇杆机构,它结构简单、质量轻、可实现微型化,但是其本身为非对称结构,在扑动过程两侧机翼存在扑翼角度相位差,会出现栽落现象,影响飞行稳定性和安全性[6]。
中国民航大学航空工程学院的杨永刚[7]等人采用双曲柄双摇杆结构进行驱动,并对其最小传动角最大进行优化分析。周晓磊[8],陈世杰[9],阮龙欢[10]等人设计复合驱动机构,实现翼翅的∞字型运动。这些机构都是空间四杆机构和双曲柄双摇杆机构的演变,具有良好的机构对称性,但结构复杂不利于微型化。
本文在前人研究成果的基础上,设计一种新型扑翼驱动机构,对其进行运动学分析,用三维设计软件Solidworks对其进行建模,并对机翼运动过程中的扑动角,扑动角速度和角加速度进行了分析,结构简单,易于控制,扑动角度具有较高的对称性,传动效果明显,为扑翼飞行器的开发提供一定的参考。
2 微扑翼驱动机构的设计和三维建模
2.1 微扑翼驱动机构设计目标
微扑翼驱动机构的设计目标是在已有驱动机构的基础上,模仿昆虫翅膀的运动形式,对昆虫翅膀的扑动特征抽象简化,设计出符合要求的扑翼驱动机构。
通过对昆虫飞行运动进行观察发现,昆虫翅膀在扑动过程中是对称的,可将昆虫复杂的扑翼运动简化为上下扑动,扑动角为φ,由非定常空气动力学理论及验证扑翼机的实验[7]可知,升力随着φ范围的增大而增大。为保证仿生扑翼机飞行的稳定性,理想的扑翼机构要左右对称,左右载翅杆对称且同步扑动,而且扑翼机构运行要高效可靠,在满足扑动要求的条件下,尽可能减少杆件数目,减轻质量,结构紧凑。
2.2 扑翼驱动机构的三维建模
本文设计了一种微型扑翼驱动机构,主要是由凸轮—齿条框架机构组成,将盘形凸轮与矩形齿条框架相组合,电机带动凸轮转动,凸轮的旋转运动转化成齿条框架的上下往复运动,带动啮合的齿轮完成有限角度的摆动,而机翼和齿轮为一体,表现为机翼的扑翼运动。如图1所示。

图1 微型扑翼驱动机构
凸轮机构结构紧凑、简单,通过合理的轮廓曲线设计即可有效避免刚性和柔性冲击,在各种工程机械和自动化仪器中都有广泛的使用。该扑翼驱动机构选择凸轮机构可以有效保证机翼扑动的对称性,提升扑翼机飞行的效果。利用Solidworks对扑翼驱动机构进行参数化建模,然后进行虚拟装配,通过运动仿真初步验证所设计驱动机构的运动形式。
3 各机构尺寸关系分析
首先,分析机翼扑动角度φ与凸轮基圆半径r0和最大直径d1的关系。
设凸轮绕定轴转动的角速度为ω1,齿轮的角速度为ω2,齿轮旋转的周数设为X,凸轮的最大顶程为S,齿条的行程设为L。
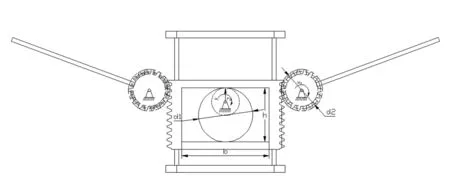
图2 扑翼驱动机构中几何关系图
由图2中的几何关系可建立如下运动方程:

其中:
齿轮的直径 d2= πmz1; (3)
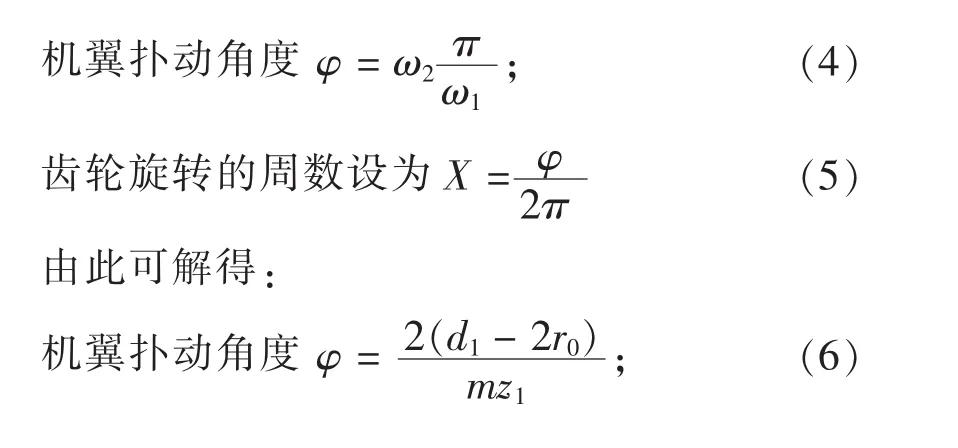
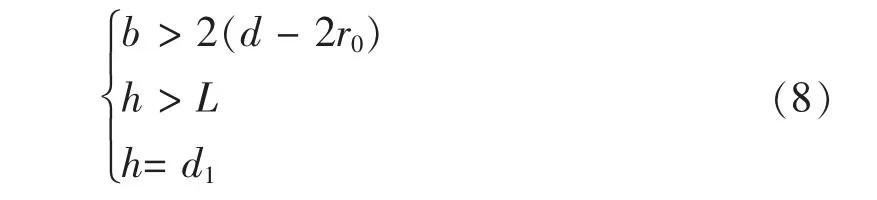
由公式(6)可以看出,为增大扑动角φ,可以通过增大凸轮的最大直径或减小凸轮基圆半径;选用合适的模数和齿数也是非常重要的。
由式(1)(6)可以解得:

可以看出,机翼的角速度与凸轮角速度的关系,通过改变电机的转速以及凸轮的尺寸大小可以改变机翼的角速度,从而改变机翼的扑动频率。
由于平底直动从动件盘形凸轮机构中,凸轮轮廓线与平底接触处的公法线垂直于平底,故压力角等于零,所以传动角最大,传动效果最佳。
根据此机构各部分间的几何尺寸关系可得约束条件:
4 扑翼机构的构筑
4.1 扑翼机构参数
取齿条框架的高h=39 mm,宽度d=58 mm,齿条长度为35 mm,凸轮的基圆半径r0=10 mm,d1=39 mm,机翼齿轮的模数 m=1.5,z1取 18,齿条的行程s取19 mm,由公式(6)可以计算得出机翼的扑动角度为80.7°。
仿真模型的建立有助于对机构设计的验证和改进。如图3所示。
根据相似理论,忽略掉构件的细节部分,只保证构件的几何形体的质量、质心位置、惯性矩和惯性积同实际构件相同。在模型竖直方向上施加重力,然后给予凸轮以匀角速度运动,测量相关数据。
4.3 仿真结果与分析
4.3.1 机翼扑动角度分析

图3 ADAMS仿真模型

图4 机翼扑动角度曲线图
图4是机翼在一段周期内的扑动角度的曲线图。由曲线可以看出机翼的扑动角度φ的范围在80度左右,此数值与由公式计算得出的结果基本吻合。并且可以看出机翼上下扑动的角度随时间成正弦曲线变化,保证了飞行时的稳定性。
4.3.2 机翼扑动角速度分析
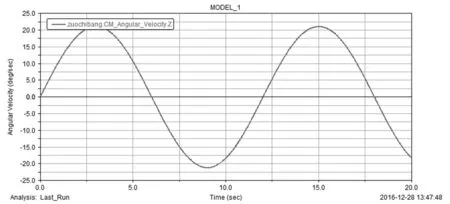
图5 机翼扑动角速度曲线图
图5是机翼在一段周期内的扑动角速度的曲线图。从图中可以看出,机翼上下扑动的角速度比较稳定,可以给微型扑翼机提供稳定的升力,提高了飞行的稳定性。
4.3.3 机翼扑动角加速度分析图
表3和表4显示了焚烧炉飞灰和底渣中所含的主要重金属组分和其渗出特性数据,其中MSW热解碳、直接焚烧底灰、耦合焚烧底渣均为实验室测试数据,使用同一批次的生活垃圾的制样;“耦合焚烧底渣(运行)”采样于规模15 t/d、24 h运行的焚烧炉。

图6 机翼扑动角加速度曲线图
图6是机翼在一段周期内的扑动角加速度的曲线图。从图中可以看出角加速度总体比较稳定,在扑动过程中有轻微的振荡,属于正常现象,可以继续对机构进行改进,提高加速度的稳定性。
5 结束语
文章基于生物仿生学的原理设计了一种新型的微型扑翼驱动机构。驱动机构中的齿轮齿条机构,解决了单曲柄摇杆机构在扑动过程中的两侧机翼扑动角度的不对称性问题。采用Soliworks进行三维建模,导入ADAMS仿真软件中,进行运动学仿真分析。该设计的扑动角度和仿真扑动角度都在80°左右,对其角速度和角加速度加以分析发现,运动曲线基本呈正弦曲线变化,具有良好的对称性。该新型微型扑翼驱动机构满足当初的设计要求,能够为后期扑翼机的制作提供依据。
参考文献:
[1]MCMICHEAL J M,FRANCIS M S.Micro air vehicles-toward a new dimension in flight[R].US DARPA/TTOReport,1997.
[2]肖永利,张琛.微型飞行器的研究现状与关键技术[J].宇航学报,2001,(5):26-32.
[3]COLOZZA A.Planetary exploration using biomimetics:an entomopter for flight on Mars[C].NIAC Fellows Conference.NASA Ames Research Center,2001,(6):24-25.
[4]FEARING R S,CHIANG K H,Dickinson M H,et al.Wing transmission for a micromechanical flying insect[C]//IEEE International Conference on Robotics and Automation,ICRA 2000,April 24-28,2000,San Francisco,CA,USA,DBLP,2001:1509-1516.
[5]Festo Corporate-Smart Bird[EB/OL].[2010-12-15].http://www.festo.com/cms/en_corp/11369.html.
[6]熊超.微型扑翼飞行器尾翼的分析与设计方法研究[D].西安:西北工业大学,2007.
[7]杨永刚,苏汉平.扑翼飞行器驱动机构的优化设计与仿真[J].机械传动,2017,(1):122-126.
[8]周晓磊.仿生扑翼飞行器的气动力与驱动机构研究[D].上海:上海工程技术大学,2016.
[9]陈世杰.扑翼式飞行器的驱动机构研究[D].西安:西安工业大学,2015.
[10]阮龙欢.仿生扑翼飞行机器人结构设计及运动学研究[D].武汉:武汉科技大学,2016.
THE DESIGN AND KINEMATICS ANALYSIS OF THE MICRO FLAPPING ACTUATOR
XU BingCHEN QiangWANG Wei
(Chaohu College, Chaohu Anhui 238000)
This paper proposes a new flapping actuator to simulate the flapping-wing movement of insects.The Solidworks is adopted to build the parametric model and ADAMS to simulate the kinematics of flapping.It is found that the flapping angle,angular velocity and angular acceleration of the wing are sinusoidal variable with time and with good symmetry,which provides a powerful reference for the building of subsequent flapping machines.
Flapping actuator; Solidworks; ADAMS; Kinematics simulation
V276
A
:1672-2868(2017)03-0099-05
责任编辑:陈小举
2016-03-09
安徽省高等学校自然科学研究项目(项目编号:KJ2015A281);巢湖学院校级科学研究项目(项目编号:XLZ-201506)
徐兵(1990-),男,安徽舒城人。巢湖学院机械与电子工程学院,助教。研究方向:驱动器、扑翼机器人。
