考虑驾驶员个体差异的汽车EPS控制仿真分析
2017-08-12王金波汪选要邱利宏
王金波, 夏 光, 汪选要, 邱利宏
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009)
考虑驾驶员个体差异的汽车EPS控制仿真分析
王金波1, 夏 光2, 汪选要1, 邱利宏1
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009)
行车安全与驾驶员、车辆、道路等密切相关,而不同驾驶员个体之间的特性差异很大。文章将驾驶员分为A(熟练)、B(一般)、C(生手)3类,给定的行驶路径作为驾驶员模型的输入,转向盘转矩作为模型的输出;将A类驾驶员的输出转向盘转矩作为期望值,考虑不熟练驾驶员因对侧向力感知缺乏而导致的误操作转矩的影响,提出了一种跟踪期望驾驶特性的汽车电动助力转向系统(electric power steering,EPS)控制策略,建立了能够表征驾驶特性(熟练程度等)并考虑误操作转矩的驾驶员模型,与车辆组成人-车闭环系统。仿真结果表明,采用跟踪期望驾驶特性的汽车EPS控制策略,改善了汽车的操纵稳定性,减轻了驾驶员的转向负担,从而验证了该控制策略的有效性。
驾驶员;个体差异;电动助力转向系统(EPS)控制;误操作转矩
汽车电控系统对于提高汽车的行驶安全性、乘坐舒适性等发挥了重要作用。人们对汽车的性能提出了越来越高的要求,因为车辆与驾驶员之间存在着相互作用和影响,所以考虑不同驾驶特性的驾驶员因素、建立人-车闭环的控制系统以提高汽车的性能成为目前研究的热点之一。
转向系统是汽车底盘的重要组成部分,它与驾驶员之间相互影响。文献[1]利用人机相互作用原理设计电动助力转向系统(electric power steering,EPS)控制器,确保驾驶员的安全和操作舒适;文献[2]根据驾驶员的生理、心理和疲劳程度等将驾驶特性分为12类,并分析了驾驶行为特性与行车安全之间的关系;文献[3]开发了驾驶员和车辆之间的界面,目的在于设计考虑驾驶特性影响的EPS控制器;文献[4]考虑驾驶员的操纵特性,利用转向盘转角和转矩,基于增益调度控制实现驾驶员和辅助系统的协调;文献[5]设计了一种底盘集成控制系统,包括后轮主动转向、纵向驱动力补偿和直接横摆力矩控制,建立了驾驶员模型,与车辆组成人-车闭环系统,提高了车辆的操纵稳定性和主动安全性,增强了车辆的路径跟踪能力;文献[6-7]通过求解线性二次型调节器(linear quadratic regulator,LQR)问题得到预瞄和状态的控制增益来模拟驾驶员的转向动作,该驾驶员模型为线性模型;文献[8]利用自适应阈值的向量场直方图算法对智能车辆车道保持系统中避障路径进行局部路径规划,辅助驾驶员控制车辆,减少了交通事故,提高了交通效率;文献[9]利用试验的方法获取大量的试验数据,通过辨识不同驾驶员的神经肌肉动力学和车辆动力学模型来模拟驾驶员的转向行为;文献[10]开发了准线性驾驶员模型,提出了包含驾驶员模型和牵引半挂车的闭环系统,研究结果表明,驾驶员的固有延时、半挂车的载荷和车速对闭环系统有重要的影响;文献[11]采用容错控制策略,针对传感器故障情况设计控制器研究了EPS系统的容错控制,有利于改善驾驶员的驾驶安全性;文献[12]设计了包含四轮驱动电机和主动转向系统的全轮驱动电动汽车,开发了路径跟踪和增益调度速度控制驾驶员模型,通过控制输入跟踪预定路径,改变四轮的驱动转矩,使得实际车速与期望车速偏差最小。
上述研究均考虑了驾驶员与车辆之间的相互作用及影响,但在驾驶员个体差异影响汽车EPS控制方面,尚未有深入研究。技术不熟练或驾驶水平中等的驾驶员遇到急转弯等突发情况,往往会产生误操作转矩。本文建立了能够表征驾驶特性(熟练程度等)并考虑误操作转矩的驾驶员模型,根据熟练程度和误操作转矩将驾驶员分为3类,与车辆组成人-车闭环系统,提出一种考虑驾驶员个体差异的汽车EPS控制策略,跟踪期望驾驶特性,仿真结果验证了该控制策略的有效性。
1 车辆-驾驶员模型
1.1 人-车-路闭环系统的坐标转换
设车辆重心在t时刻的大地坐标系为(X(t),Y(t)),在相对坐标系的位置为(x(t),y(t))。车辆在任意时刻的速度为:
(1)


(2)
大地坐标系到相对坐标系的转换方程为:

(3)
(2)式与(3)式组成了人-车-路闭环系统的坐标转换环节。
车辆在大地坐标系和相对坐标系下的位置如图1所示。

图1 车辆在两坐标系下的位置
1.2 驾驶员模型
驾驶员通过转向、油门踏板与制动踏板来操纵车辆,因此驾驶员与车辆横向、纵向的运动之间关系密切。已有的研究往往忽略驾驶员个体操纵差异对车辆状态响应造成的影响。不同熟练程度、不同特性的驾驶员对车辆的操纵特性存在差异,不同特性的驾驶员在操纵车辆时会导致不同的车辆响应。因此,有必要根据驾驶员行为特性,建立驾驶员模型,对车辆控制进行研究。将驾驶员看作一个控制器,则预瞄时间、反应迟滞时间均为该控制器的参数,主要评价指标为车辆响应和驾驶员转向负担等。通过EPS的控制来减轻不同类型驾驶员的操纵负担,提高汽车的操纵稳定性。
一定车速下,汽车的侧向加速度对转向盘转角的稳态增益为Gay,达到期望侧向加速度ay应该施加的期望转向盘转角[13]为:
(4)
(5)
其中,a、b为汽车质心到前后轴的距离;Ns为转向盘转角到车轮转角的角传动比;k为汽车的稳定性因数。
车辆转向系统与驾驶员的肌肉系统在已有的研究中往往做简化,由单纯的时间延迟或一阶滞后环节表示,运动时间的范围为0.1~0.3 s。然而,该简化通常用来描述小幅度的胳膊运动,用在车辆驾驶员转向控制模型方面并不精确,驾驶员为实现转向操纵作用在转向盘上的转矩Tg(s)与期望转向盘转角θh(s)之间的动力学响应可以表述成二阶系统的形式[14],即
G1(s)=θh(s)/Th(s)=
1/[(Jd+Js)s2+(Bd+Bs)s+(Kd+Ks)]
(6)
其中,Jd、Bd、Kd分别为驾驶员胳膊的惯性、阻尼和刚度值;Js、Bs、Ks分别为转向系统的惯性、阻尼和刚度值。
考虑驾驶员生理特性的实际转向盘转矩应包含反应时间的滞后,因此表示为:
其中,td为神经反应滞后时间,用一个纯滞后环节表示。
预瞄环节为:
fe=f(t+T)
(7)
期望的侧向加速度为:
(8)
由于不熟练驾驶员尤其是“新手”在实际操作过程中,往往存在误操作转矩,本文建立的驾驶员模型考虑误操作转矩的影响来模拟驾驶员的转向行为,建立的控制系统如图2所示。

图2 驾驶员-车辆相互作用关系


2 EPS控制策略
为了提高驾驶员驾驶的舒适性和减少轮胎磨损,在一般的稳定状态下,优先采用转向来实现车辆的稳定控制。驾驶员尤其是不熟练的驾驶员在紧急情况下容易产生误操作,该误操作的程度用驾驶员误操作转矩Th′(s)来表示。如转向过度时,EPS提供阻尼控制或减小助力,防止驾驶员过多转向;转向不足时,提供助力。驾驶员模型的输入为期望道路轨迹与侧向位移和侧向速度与预瞄时间乘积的偏差,输出为转向盘转矩。该转向盘转矩与驾驶员误操作转矩叠加,车辆模型计算得到的横摆角速度、期望转向盘转矩作为EPS控制器的输入,经计算后输出前轮转角给车辆模型。
驾驶员通过手臂系统给转向盘施加转矩,该转矩经转向系统传递到前轮。转向过程中,由于转向系统本身存在摩擦、阻尼及轮胎的回正力矩的影响,转向系统会随着转向状态的变化反馈给驾驶员一个力矩。因此,驾驶员操纵转向盘的过程是一种动态的力矩交互过程。转向盘动力学方程[15]为:
(9)
转向输出轴的方程为:
(10)
其中,θh为转向盘转角;θc为输出轴转角;Jh、Ch为转向管柱的转动惯量、阻尼系数;Tsat为前轮的回正力矩;Ta为电机的助力矩;N1为电机到转向轴的传动比;Jp为转向轴的当量惯性矩;Cp为转向轴的当量阻尼系数。
直流助力电机动力学方程为:
(11)
Tm=ktim
(12)
(13)
其中,Jm、Bm为助力电机转向轴的惯性、阻尼;θm为助力电机转向轴的转向角;Tm为助力电机输出轴的转矩;kt为助力电机的力矩常数;im为助力电机的电流值;Lm、R为助力电机电气部件的电感和电阻值;ke为电机的反电动势常数;U为电机电压。
车辆的实际横摆角速度从传感器信号中获取,并以此作为确定转向助力矩Tm大小的依据。
(14)
(15)
其中,kp、ki、kd为PID控制参数;C(s)为横摆角速度偏差的超前补偿器。
3 仿真分析
不同的目标道路轨迹作为本文驾驶员模型的输入,输出是转向盘转矩,再将该转向盘转矩与驾驶员误操作转矩叠加后输入给EPS控制器,从而进行人-车闭环虚拟试验。为了验证本文所提出的EPS控制策略的有效性,对人-车非线性车辆动力学模型进行车速为40 km/h双移线工况下的仿真分析,双移线试验工况的目标路径如图3所示。
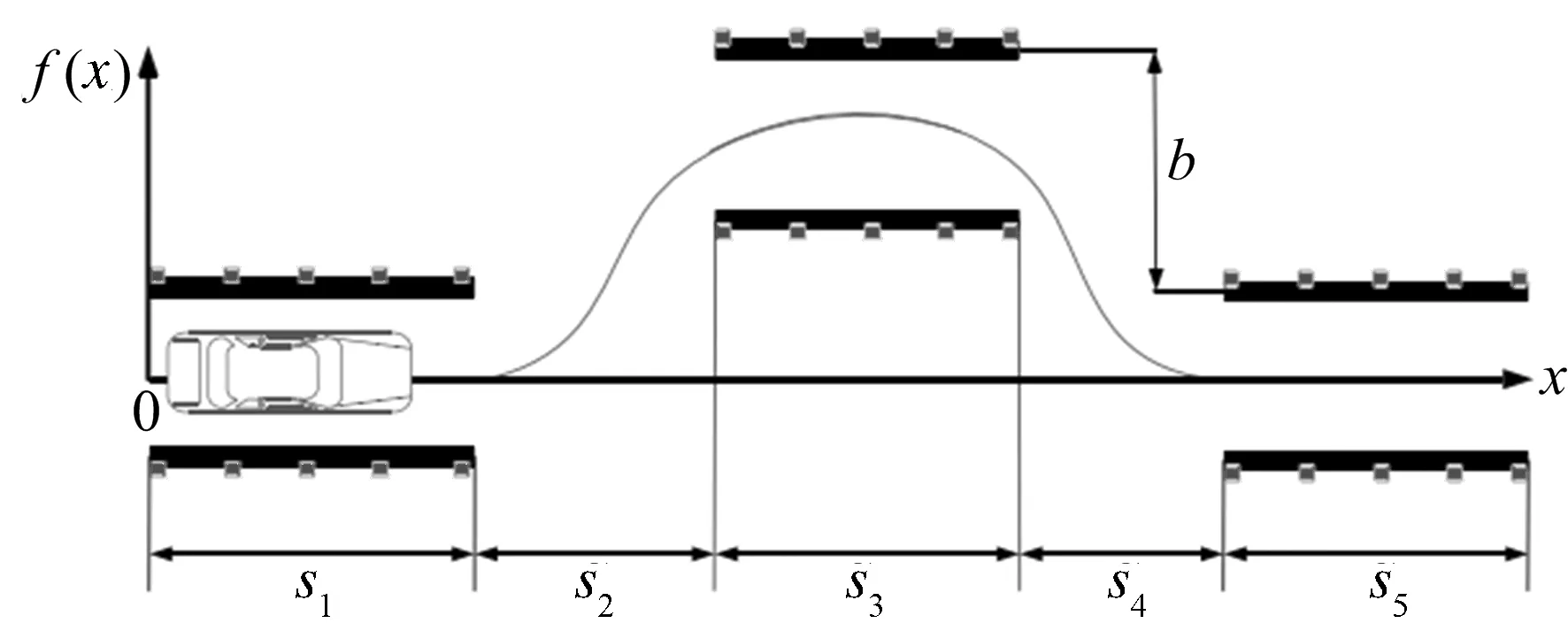
图3 双移线试验工况的目标路径
x轴表示纵向位移,侧向位移函数f(x)[16]为:
(16)
其中


f22={-2b(s1+s2+s3)[2s1+2s2+2s3+


s4=25 m,s5=96 m,b=3.5 m。
驾驶员的神经反应滞后时间和动作反应滞后时间受年龄、性别、个性、健康状况等特性的影响。通常情况下,熟练驾驶员的反应时间较短,而不熟练驾驶员反应时间较长。仿真时不同熟练程度的驾驶员对应的模型参数见表1所列。车辆部分主要参数见表2所列。

表1 不同驾驶特性对应的驾驶员模型参数

表2 车辆部分主要参数
转向盘转矩、转向助力矩、横摆角速度响应分别如图4~图6所示。

图4 转向盘转矩响应曲线
由图4可知,由于驾驶员A具有较长的预瞄时间和较短的神经反应滞后时间,在经过相同的路径时,相比于驾驶员B和贺驶员C,转向盘转矩较小,即熟练驾驶员的转向轻便性较好。

图5 转向助力矩
由图5可知,采用跟踪期望驾驶特性的汽车EPS控制策略,助力电机分别提供给驾驶员B和驾驶员C转向助力矩;且提供给驾驶员B的转向助力矩比提供给驾驶员C的小。在所设计的EPS控制策略中,EPS助力电机提供的转向助力矩大小与驾驶员的熟练程度有关。

图6 横摆角速度响应
由图6可知,驾驶员A、B、C在无EPS控制的情况下,横摆角速度依次增大;当驾驶员B、C在有EPS控制的情况下,横摆角速度变小,车辆稳定性变好。
由于人受到身体胳膊等生理条件的限制,转向能力在一定范围内,即最大转向角及转向角速度表征了人体的生理极限。驾驶员转向角及转向角速度越大,表明驾驶员在操纵转向盘的过程中,越接近生理极限,即转向负担越大。驾驶员转向角的大小与驾驶员的体力负担相关,而驾驶员转向角速度的大小与驾驶员的精神负担相关。用一定时间内转向角和转向角速度平方的积分分别表示驾驶员的转向体力负担和精神负担,驾驶员的体力负担J1和精神负担J2分别为:
(17)
(18)
驾驶员转向体力、精神负担如图7所示。

图7 驾驶员转向负担
由图7可知,驾驶员A具有较大的预瞄时间,能够有效地减小转向负担,而驾驶员C增加了转向负担。研究结果表明,预瞄时间和反应时间能够显著影响车辆系统的动力学特性和驾驶员的转向负担,较大的预瞄时间和较小的反应时间,能够有效减轻驾驶员的转向负担。
仿真结果表明:采用跟踪期望驾驶特性的汽车EPS控制策略具有较好的控制效果,底盘系统能够获得更好的控制性能,显著提高了车辆的操纵性和行驶稳定性,并减小了不熟练驾驶员的转向负担;在相同的EPS控制策略下,较熟练的驾驶员能够有效减小转向负担,新手为了实现路径跟踪特性,需要更大的转向负担。本文提出的EPS控制策略,能够减轻不熟练驾驶员的转向负担。
4 结 论
驾驶员A、B、C的转向盘操作转矩峰值分别为3.4、4.2、6.1 N·m;驾驶员A的转向盘操作转矩峰值比驾驶员B、C分别减小了19.05%、44.26%,表明相同行驶条件下,熟练驾驶员的转向盘操作转矩较小。驾驶员B、C的转向助力矩峰值分别为0.26、0.37 N·m;驾驶员B的转向助力矩峰值比驾驶员C的减小了29.23%,表明相同行驶条件下,不熟悉驾驶员需要的转向助力矩较大。
在深入分析汽车动力学特性与驾驶行为特性的基础上,本文提出了一种考虑驾驶员个体差异的汽车EPS控制策略,减轻了不熟练驾驶员的驾驶转向负担,保证汽车的稳定行驶性。仿真结果验证了该控制策略的稳定性和有效性,提高了汽车的行驶稳定性。
[1] SUGITA S,TOMIZUKA M,EI-SHAER A.Human-machine interaction in vehicle steering:SAE Paper 2009-01-0359[R]. [S.L]:SAE,2009.
[2] 何杰,杨娇,杭文,等.考虑驾驶员行为特性的行车安全仿真试验[J].解放军理工大学学报(自然科学版),2013,14(6):668-673.
[3] MEHRABI N,SHOURIJEH M S,MCPHEE J.Study of human steering tasks using a neuromuscular driver model[C]//Advanced Vehicle and Control Conference.Pennsylvania State: [s.n.],2012.
[4] FUJIWARA Y,ADACHI S.Steering assistance system for driver characteristics using gain scheduling control[C]//2003 European Control Conference.Cambridge:European Union Control Association,2003:898-903.
[5] 李昌刚,武建勇,唐厚君,等.基于底盘集成控制的人-车闭环系统对提高车辆操纵稳定性和路径跟踪能力的效果研究[J].汽车工程,2009,31(9):812-819.
[6] SHARP R S,CASANOVA D,SYMONDS P.A mathematical model for driver steering control,with design,tuning and performance results[J].Vehicle System Dynamics,2000,33(5):289-326.
[7] SHARP R S,VALTETSIOTIS V.Optimal preview car steering control[J].Vehicle System Dynamics,2001,35(1):101-117.
[8] 汪明磊,陈无畏,王家恩.智能车辆车道保持系统中避障路径规划[J].合肥工业大学学报(自然科学版),2014,37(2):129-133.
[9] ODHAMS A M C.Identification of driver steering and speed control[D].London:Cambridge University,2006.
[10] LI X S,ZHANG J W,WANG M G.Driving stability of closed loop tractor-semitrailer vehicle system with optimal driver model[C]//2009 International Conference on Measuring Technology and Mechatronics Automation.[S.l.:s.n.],2009:514-517.
[11] 胡延平,赵林峰,赵斌,等.基于容错控制的电动助力转向故障诊断系统设计[J].合肥工业大学学报(自然科学版),2013,36(1):20-23.
[12] JALALI K,LAMBERT S,MCOHEE J.Development of a path-following and a speed control driver model for an Electric Vehicle:SAE Paper 2012-01-0250[R].[S.l.]:SAE,2012.
[13] 丁海涛,郭孔辉,李飞,等.基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J].机械工程学报,2010,46(10):116-120.
[14] TAHERI S,RAKHEJA S,HONG H.Influence of human driving characteristics on path tracking performance of vehicle[C]//Proceedings of the 5th International conference on Intelligent robotics and Applications.Berlin,Heidelberg:Springer-Verlag,2012:207-216.
[15] 赵林峰,陈无畏,秦炜华,等.低附着路面条件的EPS控制策略[J].机械工程学报,2011,47(2):109-114.
[16] 苏运福.基于驾驶员行为模型预测的汽车动力学控制研究[D].长春:吉林大学,2015.
(责任编辑 胡亚敏)
Simulation analysis of vehicle EPS control considering driver individual differences
WANG Jinbo1, XIA Guang2, WANG Xuanyao1, QIU Lihong1
(1.School of Automobile and Traffic Engineering, Hefei University of Technology, Hefei 230009, China; 2.Institute of Automobile Engineering Technology, Hefei University of Technology, Hefei 230009, China)
Road safety is closely related with the driver, vehicle, road, etc., and there is large difference between different drivers’ individual characteristics. Drivers can be divided into three categories, namely A, B and C(skilled, general and unskilled). A given driving path is taken as the input of the driver model, and the steering wheel torque as the output. Taking the output of the skilled driver’s steering wheel torque as the desired value, considering the wrong operation torque caused by the unskilled drivers due to lack of perception of the lateral force, a control strategy of vehicle electric power steering(EPS) tracking the desired driving characteristics is proposed. The driver model which can characterize the driving characteristics like proficiency, etc. and consider the wrong operation torque is established, and the driver-vehicle closed-loop system is built with the model and the vehicle. Simulation results show that the control strategy of vehicle EPS tracking the desired driving characteristics improves the vehicle handling stability and reduces the driver’s steering efforts, thus verifying the effectiveness of the proposed control strategy.
driver; individual difference; electric power steering(EPS) control; wrong operation torque
2016-01-19;
2016-02-29
国家自然科学基金资助项目(51175135;51205101)
王金波(1979-),男,山东临朐人,合肥工业大学博士生; 夏 光(1983-),男,安徽宿州人,博士,合肥工业大学副研究员,通讯作者,E-mail:xiaguang008@163.com.
10.3969/j.issn.1003-5060.2017.07.001
U461.6
A
1003-5060(2017)07-0865-06